Holybro Pixhawk 6X-RT – (Developer Edition) Autopilot-Flugsteuerung Standard/Mini-Set
Holybro Pixhawk 6X-RT – (Developer Edition) Autopilot-Flugsteuerung Standard/Mini-Set
HolyBro
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
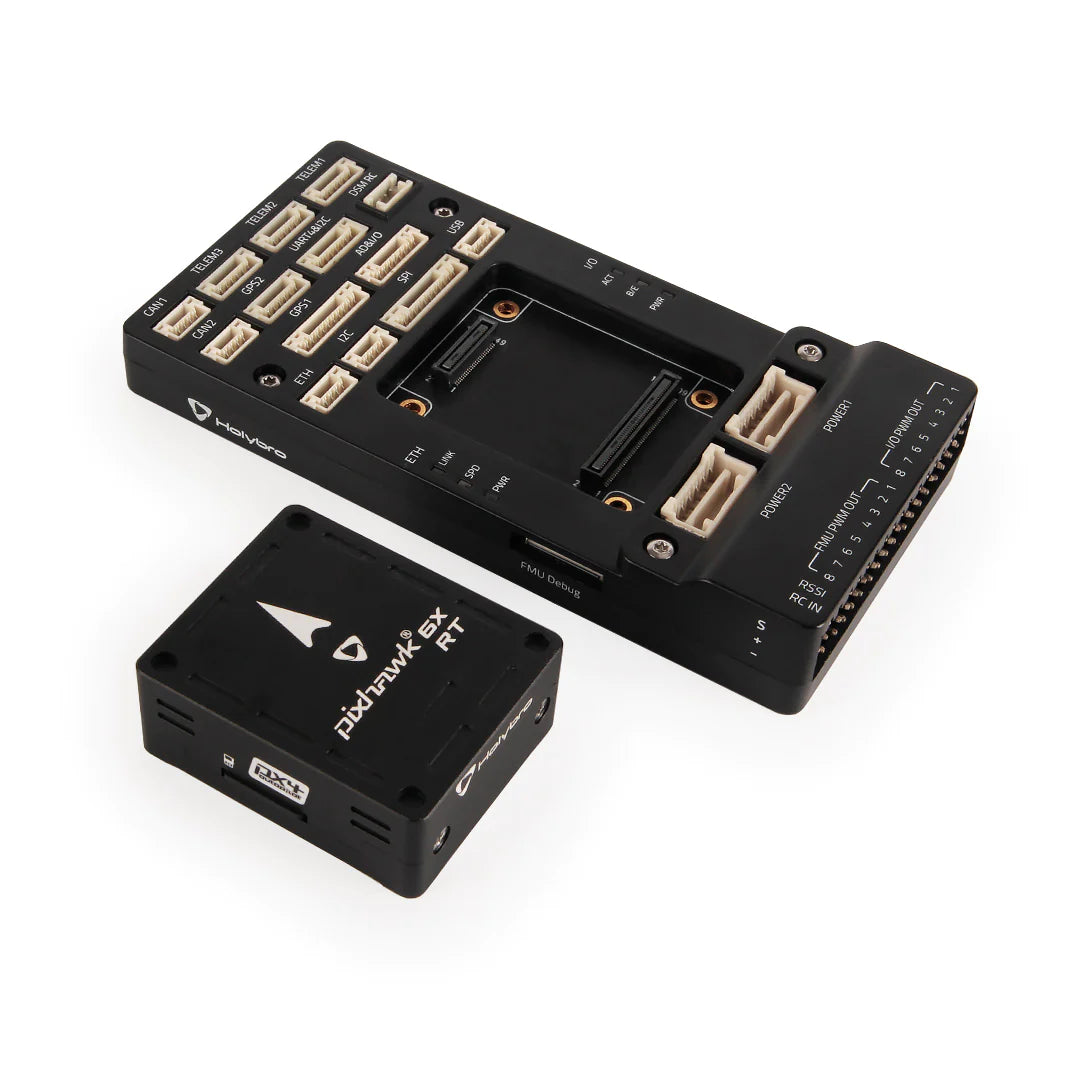
Der Pixhawk 6X-RT basiert auf dem Pixhawk® FMUv6X-RT Open Standard und dem Pixhawk® Autopilot Bus Standard. Im Lieferumfang ist PX4 Autopilot® vorinstalliert. Im Pixhawk 6X-RT-Flugcontroller befindet sich ein NXP-basiertes i.MXRT1176 MCU, gepaart mit Sensortechnologie von Bosch® und InvenSense®, bietet Ihnen Flexibilität und Zuverlässigkeit bei der Steuerung jedes autonomen Fahrzeugs.
Das i.Der Mikrocontroller MXRT1176 enthält einen Arm® Cortex-M7 mit 1 GHz und einen Cortex-M4 mit 400 MHz. Es verfügt über 2 MB SRAM und 64 MB Octal SPI Flash. Dank der aktualisierten Rechenleistung können Entwickler ihre Entwicklungsarbeit produktiver und effizienter gestalten und komplexe Algorithmen und Modelle erstellen.
Es umfasst leistungsstarke, geräuscharme IMUs, die für eine bessere Stabilisierung ausgelegt sind, und verfügt über dreifach redundante IMUs und doppelt redundante Barometer auf separaten Bussen. Wenn der Autopilot einen Sensorfehler erkennt, schaltet das System nahtlos auf einen anderen um, um die Zuverlässigkeit der Flugsteuerung aufrechtzuerhalten. Ein unabhängiger LDO versorgt jeden Sensorsatz mit unabhängiger Leistungssteuerung. Ein Vibrationsisolationssystem filtert hochfrequente Vibrationen und reduziert Geräusche, um genaue Messwerte zu gewährleisten und es Fahrzeugen zu ermöglichen, insgesamt bessere Flugleistungen zu erzielen. Dank des integrierten Microchip-Ethernet-PHY ist jetzt eine Hochgeschwindigkeitskommunikation mit Missionscomputern über Ethernet möglich.
Der Pixhawk 6X-RT eignet sich perfekt für Entwickler in Forschungslabors von Unternehmen, Startups, Akademikern (Forschung, Professoren, Studenten) und kommerziellen Anwendungen. Dieser Flugcontroller ist mit jedem Baseboard kompatibel, das den Pixhawk Autopilot-Bus verwendet, wie zum Beispiel dem Pixhawk Baseboard, Pixhawk Mini Baseboard und Pixhawk RPi CM4 Baseboard.
Wichtige Designpunkte
- Hochleistungs-Dual-Core i.MXRT1176-Prozessor mit Cortex-M7 bei 1 GHz – Cortex-M4 bei 400 MHz
- Modularer Flugcontroller: getrenntes IMU-, FMU- und Basissystem, verbunden durch einen 100-poligen und einen 50-poligen Pixhawk® Autopilot-Bus-Anschluss.
- Redundanz: 3x IMU-Sensoren und 2x Barometer-Sensoren auf separaten Bussen
- Dreifachredundanzdomänen: Vollständig isolierte Sensordomänen mit separaten Bussen und separater Leistungssteuerung
- Vibrationsisolationssystem zum Herausfiltern hochfrequenter Vibrationen und zur Geräuschreduzierung, um genaue Messwerte zu gewährleisten
- Ethernet-Schnittstelle für Hochgeschwindigkeits-Missionscomputerintegration
- IMUs werden durch integrierte Heizwiderstände temperaturgesteuert, was eine optimale Arbeitstemperatur der IMUs ermöglicht
- Hardware-Sicherheitselement NXP EdgeLock SE051 eine Erweiterung der weithin vertrauenswürdigen EdgeLock SE050 Plug & Trust-Sicherheitselementfamilie, unterstützt Applet-Updates vor Ort und liefert bewährte Sicherheit, zertifiziert nach CC EAL 6+, mit AVA_VAN.5 bis auf Betriebssystemebene, für starken Schutz vor den neuesten Angriffsszenarien. Eg, um die Operator-ID sicher zu speichern
Hinweis:
- Diese Entwickleredition für Erstanwender, während wir weiterhin Flugteststunden sammeln
- Dieser Flight Controller wird derzeit nur im PX4 Flight Stack unterstützt. (Firmware-Ziel: FMUv6xrt). Es wird in Ardupilot nicht unterstützt.
- Dieser Flugcontroller verwendet ein digitales Leistungsmodul (dasselbe wie Pixhawk 6X, die vollständige Liste finden Sie hier). Vergleichstabelle für Leistungsmodule
Spezifikation
-
MCU: i.MXRT1176
-
Cortex-M7 bei 1 GHz
-
Cortex-M4 bei 400 MHz
-
2 MB SRAM
-
64 MB Oktal-SPI-Flash
-
IO-Prozessor: STM32F103
-
32 Bit Arm® Cortex®-M3, 72 MHz, 64 KB SRAM
-
On-Board-Sensoren
-
Beschleunigung/Gyro: BMI088
-
Beschleunigung/Gyro: ICM-42670-P
-
Beschleunigung/Gyro: ICM-42686-P
-
Mag: BMM150
-
Barometer: 2x BMP388
- Hardware-sicheres Element
- NXP EdgeLock SE051C2
- SDHC-Schnittstelle
- 12-Kanal-PWM
- 8x UART
- 4x I2C
- 6x SPI
- 3x CAN-FD
- RMII 100M Ethernet
- USB
- Open-Source-Software-Aktivierung
- PX4-Autopilot
- NuttX RTOS
- Zephyr RTOS
SKU20257 Standard-Set/ SKU258 Mini-Set beinhaltet:
-
Pixhawk 6X-RT Flugsteuerungsmodul
-
Pixhawk Standard-Basis/Pixhawk-Mini-Basis
- PM02D HV-Leistungsmodul
-
Kabelsatz
Referenzlink:
- Anleitung zum Firmware-Flashen (Github)
- PX4 auf der NXP IMXRT1176 1 GHz MCU - Präsentationsfolien von NXP
- i.MX RT1176 – Produktseite 1-GHz-Crossover-MCU mit Arm® Cortex®-Kernen
- EdgeLock® SE051: Bewährte, benutzerfreundliche IoT-Sicherheitslösung mit Unterstützung für Aktualisierbarkeit und benutzerdefinierten Applets
Related Collections