Holybro X500 v2 PX4 Development Kit – Kohlefaser-Drohnen-Kit mit Holybro Pixhawk 6C/6X, M8N GPS, SiK Telemetrie-Radio, Industriedrohne
Holybro X500 v2 PX4 Development Kit – Kohlefaser-Drohnen-Kit mit Holybro Pixhawk 6C/6X, M8N GPS, SiK Telemetrie-Radio, Industriedrohne
HolyBro
Normaler Preis
$769.00 USD
Normaler Preis
Verkaufspreis
$769.00 USD
Grundpreis
pro
Inkl. Steuern.
Versand wird beim Checkout berechnet
Verfügbarkeit für Abholungen konnte nicht geladen werden
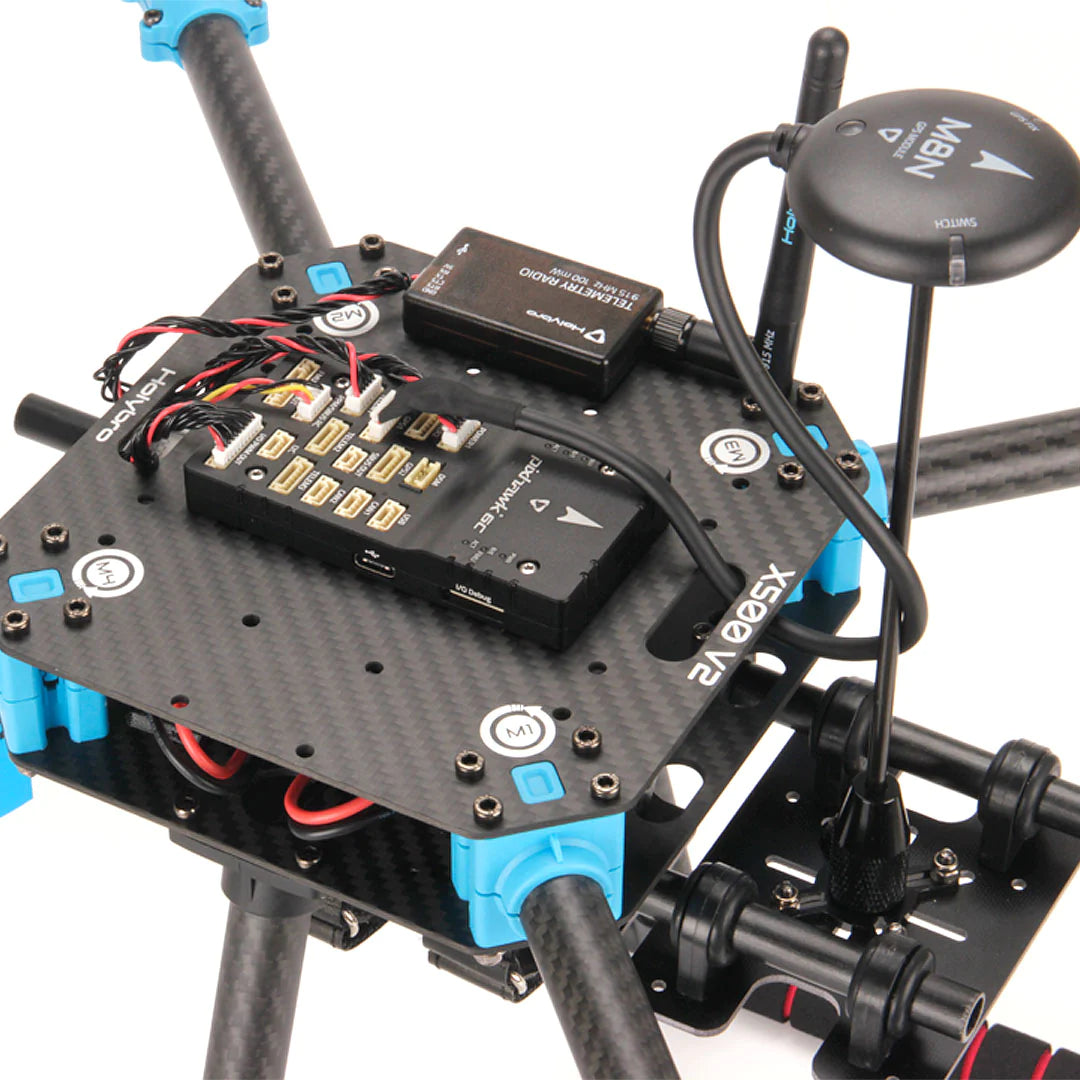
PX4 Development Kit – X500 v2 ist ein erschwingliches, leichtes und robustes professionelles Entwicklungsdrohnen-Kit aus Kohlefaser mit dem neuesten Holybro Pixhawk 6C oder Pixhawk 6X Autopilot-Flugsteuerung, M8N-GPS und Plug-and-Play-SiK-Telemetrieradio. Es lässt sich schnell und einfach zusammenbauen (ca. 30 Minuten), ohne dass Löten erforderlich ist, sodass Sie stattdessen mehr Zeit mit Fliegen und Entwickeln verbringen können. Es wird mit dem X500 V2-Rahmensatz und Motoren, Reglern, Stromverteilerplatinen und zusätzlichen Propellern geliefert. Die Drohnenarme sind mit Motoren und Reglern vorinstalliert, sodass sie ohne Löten direkt an die Stromverteilungsplatine angeschlossen werden können.
Der Rahmen (X500 v2) besteht aus Vollkarbonfaser-Twill mit Rohrarmen aus Karbonfaser, die von den neu entwickelten faserverstärkten Nylonverbindungen mit praktischen Kerben getragen werden Sowohl auf der Motor- als auch auf der Karosserieseite, was eine viel einfachere und unkompliziertere Installation ermöglicht. Das Fahrwerk besteht aus Kohlefaserrohren mit 16 mm und 10 mm Durchmesser und verdickten und verstärkten Anschlüssen.
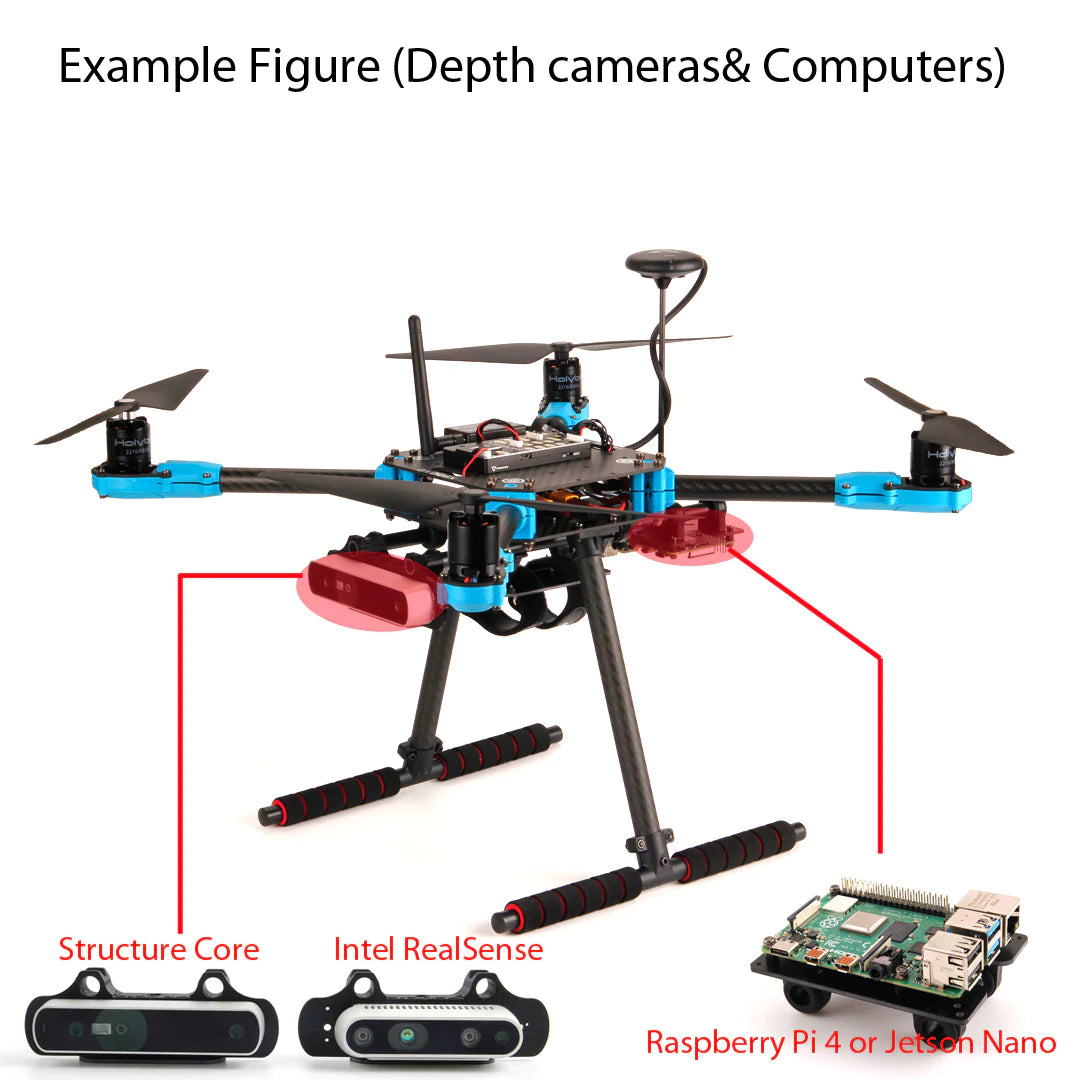
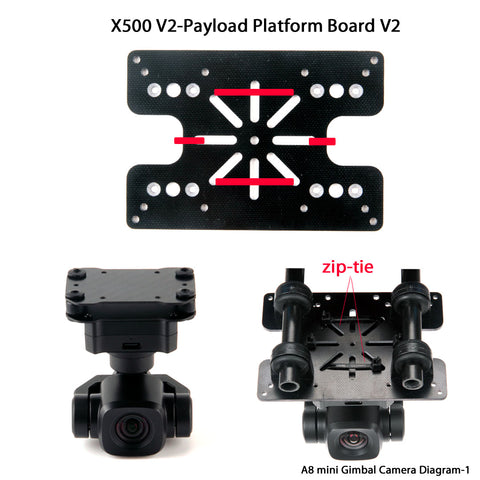
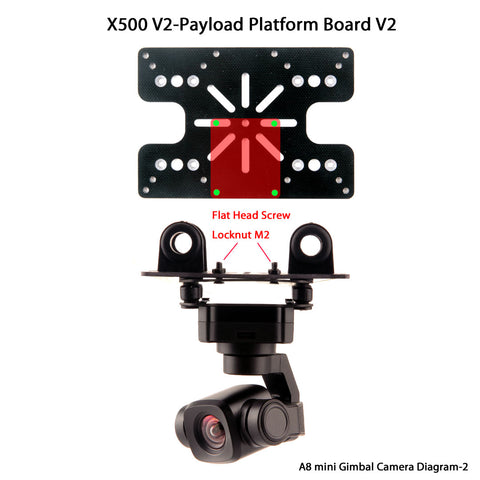
Die Plattformplatine verfügt jetzt über Befestigungslöcher für GPS und beliebte Begleitcomputer wie den Raspberry Pi 4 und den Jetson Nano. Es gibt eine optionale Tiefenkamerahalterung (separat erhältlich) für verschiedene Tiefenkameras wie die Intel RealSense-Serie und Structure Core-Tiefenkameras. Der Abstand zwischen der oberen und unteren Kohlefaserplatte wurde vergrößert, um einen leichteren Zugang zu ermöglichen. Die verstellbare Batteriemontageplatte wurde vergrößert, um größere Batterien für längere Flugzeiten zu unterstützen. Das Schienenmontagesystem ist für die Aufnahme einer Vielzahl von Kamerahalterungen und Kardanringen für verschiedene Anwendungen geeignet. Alle Werkzeuge zur Installation sind im Paket enthalten.
Hinweis: Der Pixhawk 6C Flight Controller ist sowohl mit PX4 als auch mit Ardupilot kompatibel, wird jedoch mit der Open-Source-Autopilot-Firmware PX4 geliefert.
Funktion:
- Alle neuen Pixhawk 6C oder Pixhawk 6X Flight Controller mit
- Neues Rahmendesign mit minimaler Montagezeit (~30 Minuten), kein Löten erforderlich
- Kohlefaserrahmen mit faserverstärkten Nylonanschlüssen für eine einfache und unkomplizierte Installation
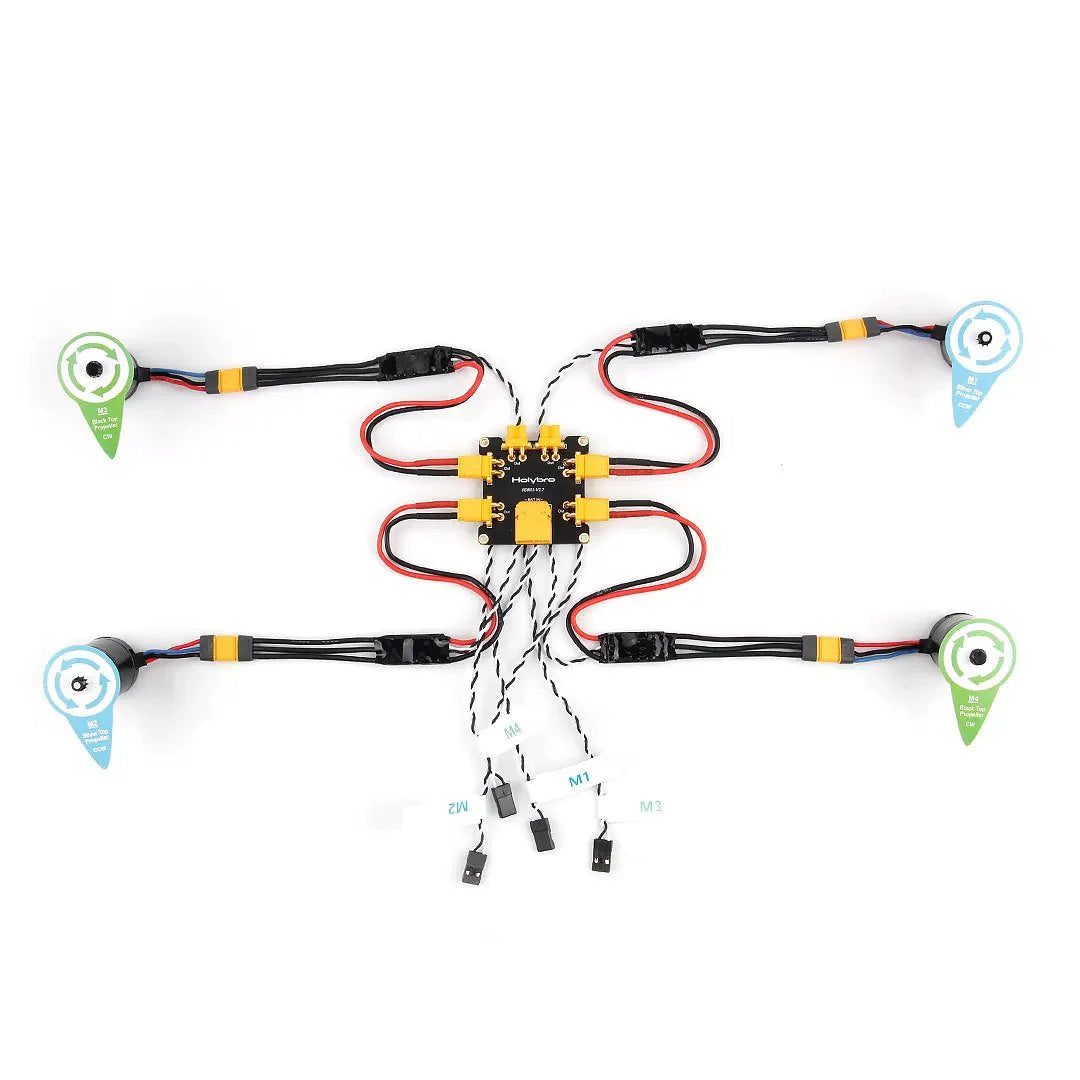
- Vorinstallierte Motoren und Regler mit einfachen XT30-Stromsteckern für PDB
- Stromverteilungsplatine (PDB) mit XT60- und XT30-Steckern
- Halterung für Begleitcomputer wie Raspberry Pi und Nvidia Jetson Nano
- Optionale Tiefenkamerahalterung für Intel RealSense & Structure Core
Hinweis:
- Die Pixhawk 6X-Version wird jetzt mit der Version PM02D-HV (Hochspannung) ausgeliefert. In PX4 müssen Sie SENS_EN_INA228 festlegen, um dies zu aktivieren. Diese HV-Version wird nur in Arduino 4.4 und höher unterstützt. Die Einrichtungsanleitung finden Sie hier.
-
Firmware-Unterstützung für M10 GPS: PX4 1.14 und ArduPilot 4.3 oder neuer sind erforderlich.
PX4 Development Kit – X500 v2 Enthält:
- Autopilot-Flugsteuerung: Pixhawk 6C (Kunststoffgehäuse) & PM02 V3 oder Pixhawk 6X (Standardbasis) & PM02D
- M10 GPS-Modul
- SiK Telemetry Radio V3 433/915 MHz
- X500 V2 Rahmenkit (SKU30120)
-
Vorinstallierte Elemente:
- Motoren - Holybro 2216 KV920 Motor (4 Stück) mit XT30-Stecker (Motorspezifikationen finden Sie hier)
- Regler – BLHeli S ESC 20 A (4 Stück) mit XT30-Steckern – kompatibel mit 4S-Akku
- 1045 Propeller (6 Stück)
- Stromverteilungsplatine (XT60-Stecker für Akku und XT30-Stecker für Regler und Peripheriegeräte)
-
Andere optionale Artikel (separat erhältlich)
- RadioMaster TX16S RC-Controller
- RadioMaster R81-Empfänger
- Tiefenkamerahalterung
Details zum X500 V2-Rahmenkit (SKU30120):
- Körper – Vollcarbon-Ober- und Bodenplatte (144 x 144 mm, 2 mm dick)
- Arm – Hochfeste und ultraleichte 16-mm-Carbonfaserrohre mit neu entwickelten faserverstärkten Nylonanschlüssen
- Fahrwerk – Kohlefaserrohre mit 16 mm und 10 mm Durchmesser und verstärkten und verbesserten Kunststoff-T-Anschlüssen.
- Plattformplatine – Mit Befestigungslöchern für GPS und beliebte Begleitcomputer wie Raspberry Pi 4 und Jetson Nano
- Doppeltes Schienenmontagesystem mit 10 mm Ø Stange x 250 mm langer Schiene
- Batteriehalterung mit zwei Batteriegurten
- Handwerkzeuge für die Installation
Mechanische Spezifikation:
- Radstand: 500 mm
- Motormontagemuster: 16x16mm
- Rahmenkörper: 144 x 144 mm, 2 mm dick
- Fahrwerkshöhe: 215 mm
- Abstand zwischen Ober- und Unterplatte: 28 mm
- Gewicht: 610g
- Flugzeit: ~18 Minuten im Schwebeflug ohne zusätzliche Nutzlast. Getestet mit 5000-mAh-Akku.
- Nutzlast: 1500 g (ohne Batterie, 70 % Drosselung)
- Batterieempfehlung: 4S 3000-5000 mAh 20C+ mit XT60 Lipo-Batterie (nicht im Lieferumfang enthalten)

X500 v2-Montageanleitung
Referenz:
Motorspezifikation
3D-Druck:
Holybro_X500_V2_3D-DruckSetup-Anleitung:
Idorobotics-Artikel
PX4-Setup-Anleitung
Ardupilot-Setup-Anleitung
Einige Tipps:
Related Collections