

JUXIE INTELLIGENT CE-HM-R48 Serie 48 V Dual-Encoder 51:1/101:1 EtherCAT/CAN Robotermotor, 0,35 kg, Kopf/Handgelenk
JUXIE INTELLIGENT CE-HM-R48 Serie 48 V Dual-Encoder 51:1/101:1 EtherCAT/CAN Robotermotor, 0,35 kg, Kopf/Handgelenk
JUXIE INTELLIGENT
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Die JUXIE INTELLIGENT CE-HM-R48 Serie ist ein kompakter Robotermotor, der für präzise Gelenkbetätigung entwickelt wurde. Das Modul integriert doppelte Encoder und unterstützt EtherCAT/CAN-Schnittstellen, was eine geringe Rückschlagleistung für Kopf- und Handgelenkverbindungen sowie eine breitere Anwendung in der humanoiden Robotik ermöglicht.
Hauptmerkmale
- Zwei Konfigurationen: 51:1 und 101:1 Übersetzungsverhältnisse.
- Doppelte Encoder mit absolutem Wert für eine Umdrehung: 19-Bit pro Umdrehung.
- Schnittstellen: EtherCAT/CAN; Stromschleife 50KHz, Geschwindigkeitsregelung 10KHz.
- Geringer Rückschlag: 15 Bogensekunden.
- Nennspannung 48 V und Nennleistung 32 W.
- Kompakte Größe R48 × 47,5 mm; leichtgewichtig 0,35 kg.
Technische Daten
| Parameter | 51:1 | 101:1 |
|---|---|---|
| Ausgangsgeschwindigkeit (U/min) | 60 | 30 |
| Nennmoment (Nm) | 3.3 | 6.5 |
| Spitzenmoment (Nm) | 8 | 16 |
| Rücklauf (Arcsec) | 15 | 15 |
| Nennspannung (V) | 48 | 48 |
| Nennleistung (W) | 32 | 32 |
| Nennumdrehungen (RPM) | 3000 | 3000 |
| Nennstrom (A) | 1.3 | 1.3 |
| Spitzenstrom (A) | 3.3 | 3.3 |
| Gesamtmaße | R48 × 47.5 mm | |
| Gesamtgewicht | 0.35 kg | |
| Encoder | Duale Encoder; einstufiger Absolutwert: 19-Bit pro Umdrehung | |
| Treiber | Schnittstelle: EtherCAT/CAN; Stromschleife: 50KHz; Geschwindigkeitsregelung: 10KHz | |
| Typische Anwendungen | Kopf- und Handgelenk-Gelenke | |
Anwendungen
- Humanoide Roboter
- Roboterarme
- Exoskelette
- Quadruped-Roboter
- AGV-Fahrzeuge
- ARU-Roboter
Handbücher
Details
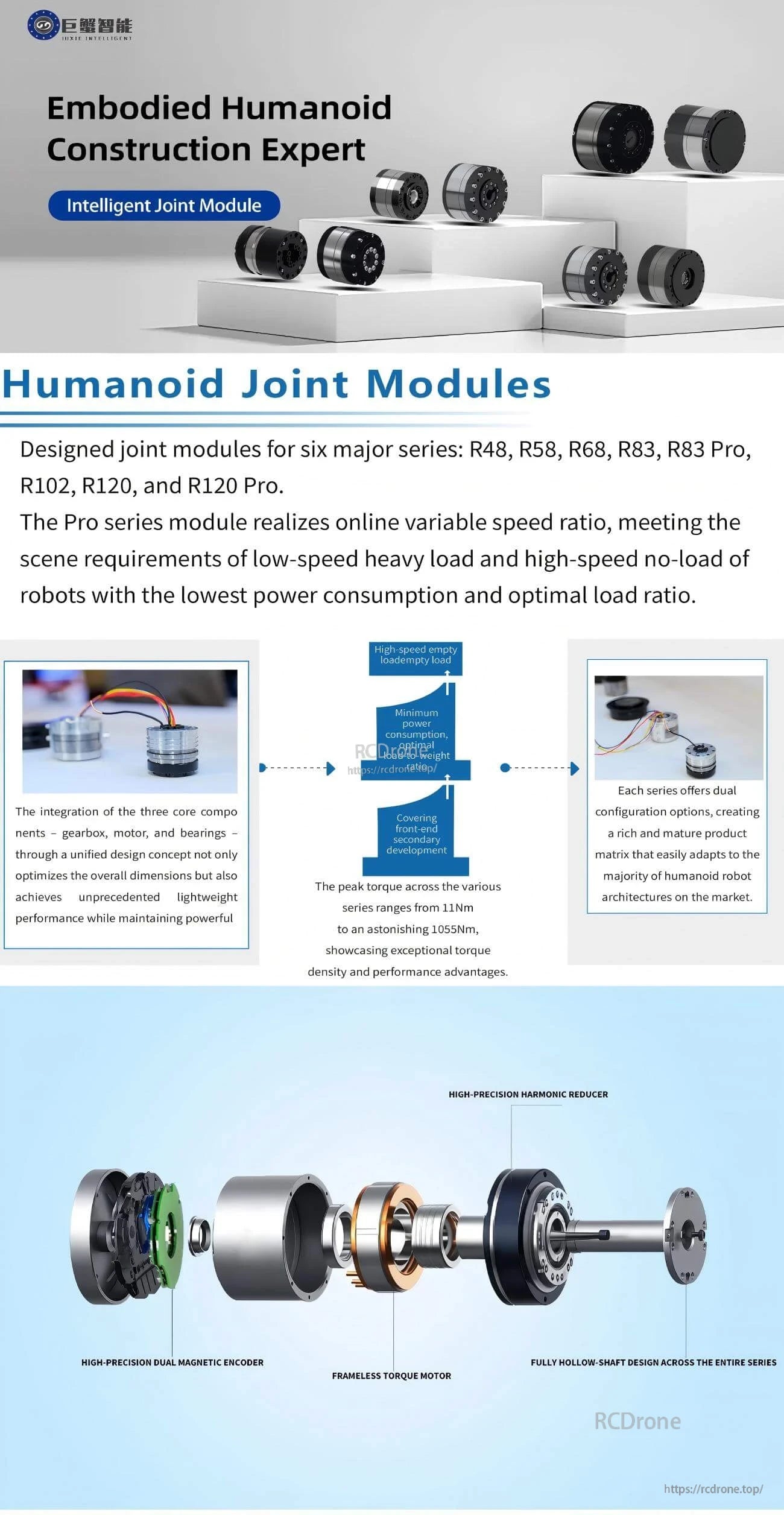
Intelligente Gelenkmodule für humanoide Roboter, ausgestattet mit hochpräzisem harmonischem Reduzierer, dualem magnetischen Encoder, rahmenlosem Drehmomentmotor und Hohlwellen-Design.Bietet variable Geschwindigkeiten, niedrigen Stromverbrauch und hohe Drehmomentdichte über mehrere Serien.
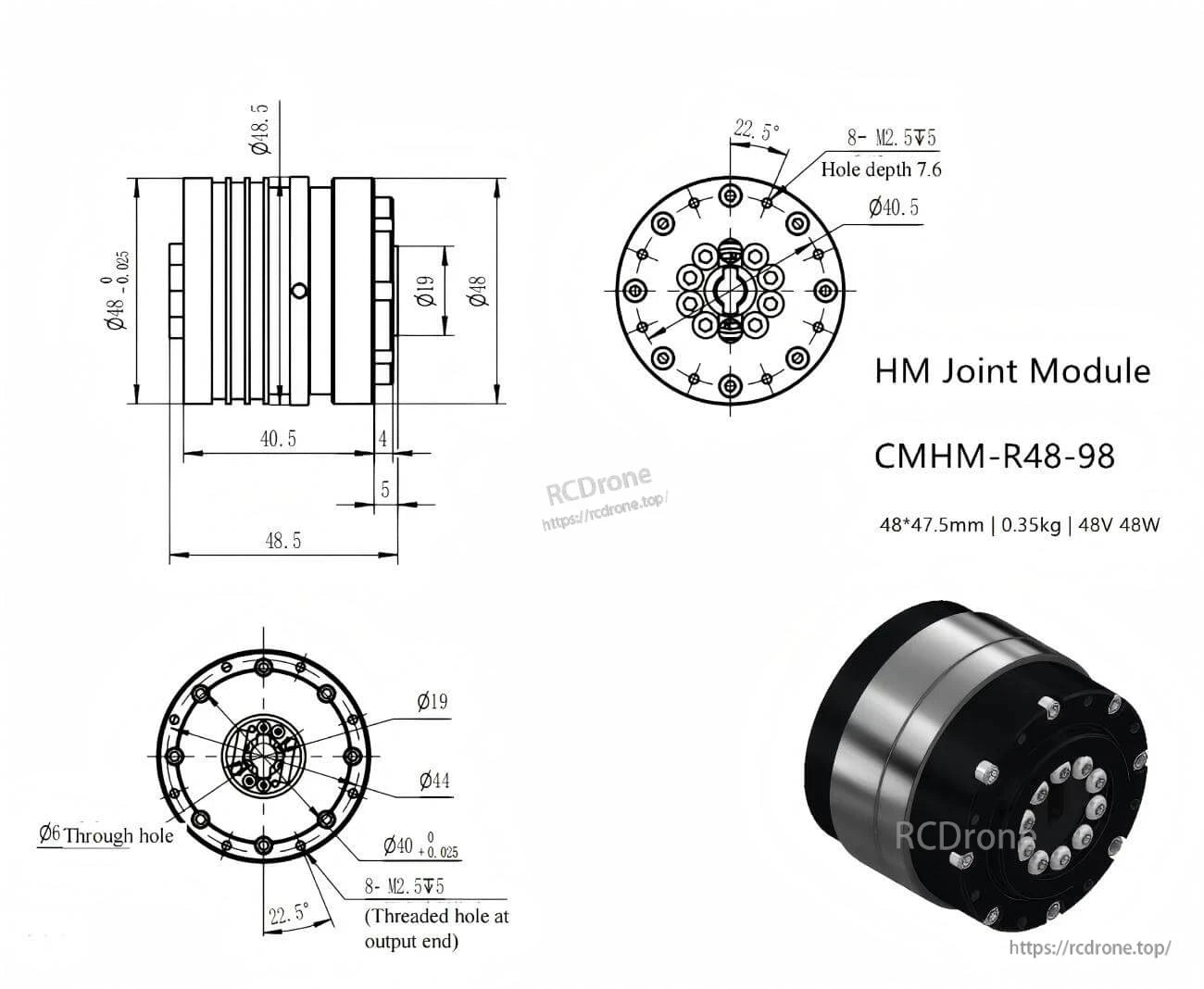
HM Joint Module CMHM-R48-98, 48×47,5mm, 0,35kg, 48V 48W, umfasst Montageschrauben und präzise Abmessungen für eine sichere Installation in kompakten Leistungsanwendungen.
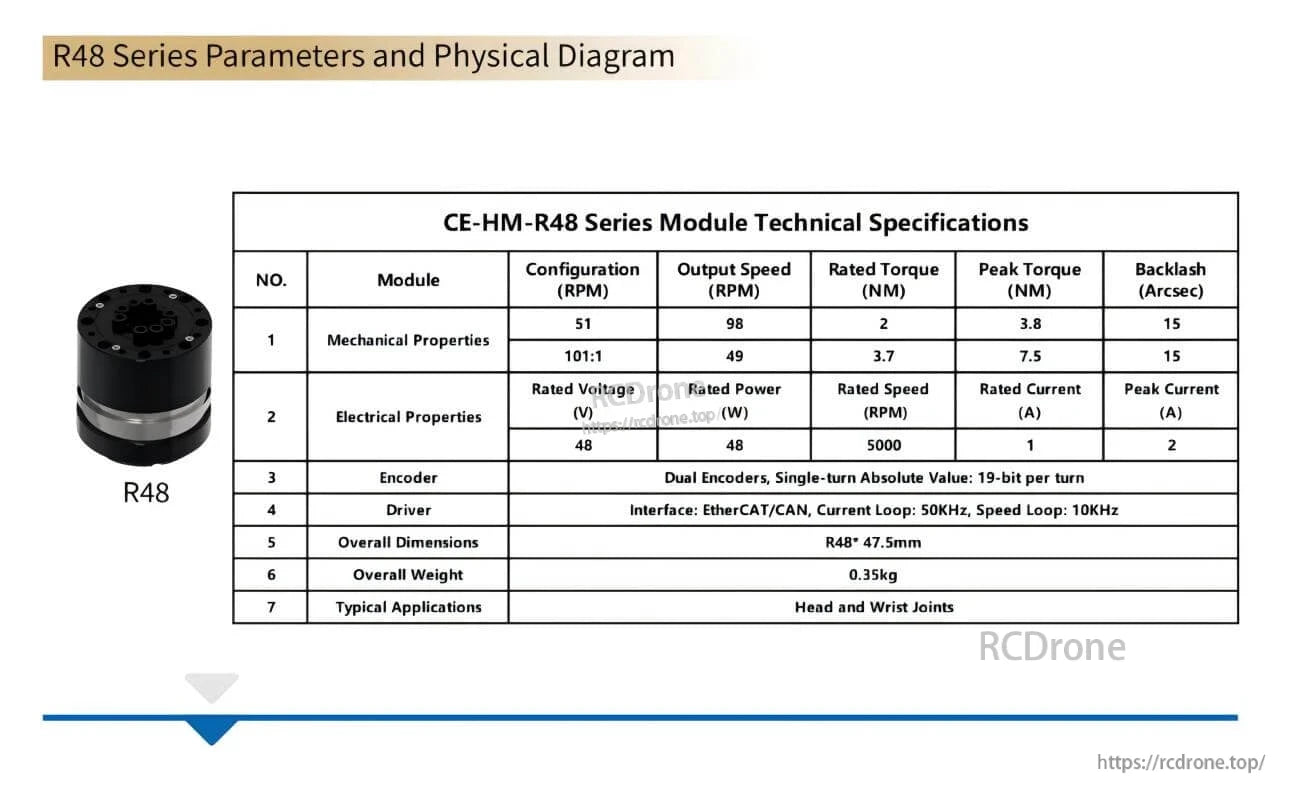
48V, 48W Motor mit 5000 U/min, 2N·m Drehmoment, dualen 19-Bit Encodern, EtherCAT/CAN. Kompakt: Ø48×47,5mm, 0,35kg. Ideal für Roboterkopf- und Handgelenkgelenke.
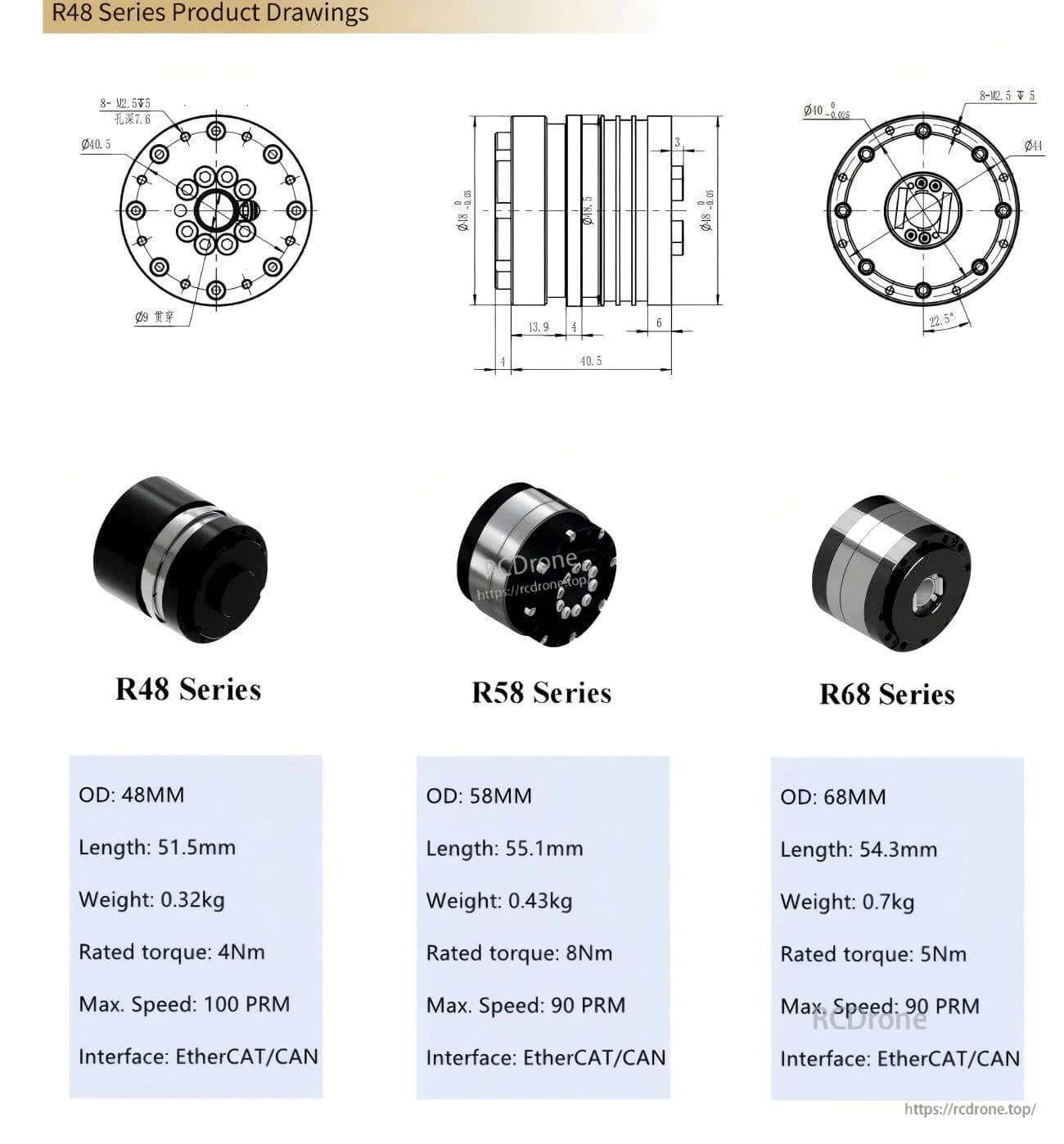
Die Motoren der Serien R48, R58 und R68 haben Durchmesser von 48mm, 58mm und 68mm, Längen von 51,5mm bis 54,3mm, Gewichte von 0,32kg bis 0,7kg, Nennmomente von 4Nm bis 8Nm, Höchstgeschwindigkeiten von bis zu 100 U/min und EtherCAT/CAN-Schnittstelle.

Related Collections

