

JUXIE INTELLIGENT CE-HM-R58 58 mm, 51:1/101:1, 48 V 95 W, 19-Bit Dual-Encoder EtherCAT/CAN Robotermotor
JUXIE INTELLIGENT CE-HM-R58 58 mm, 51:1/101:1, 48 V 95 W, 19-Bit Dual-Encoder EtherCAT/CAN Robotermotor
JUXIE INTELLIGENT
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Die JUXIE INTELLIGENT CE-HM-R58-Serie ist ein kompaktes Robotermotor-Gelenkmodul für humanoide und industrielle Robotik. Das R58-Modul integriert einen harmonischen Reduzierer, einen rahmenlosen Drehmomentmotor und doppelte magnetische Encoder in einem Hohlwellen-Design, um präzise Bewegungen für Kopf-, Handgelenk- und Ellbogengelenke zu ermöglichen. Kommunikation und Steuerung werden über EtherCAT oder CAN unterstützt, um eine einfache Integration zu gewährleisten.
Hauptmerkmale
- Integrierter harmonischer Reduzierer, rahmenloser Drehmomentmotor und hochpräziser doppelter magnetischer Encoder.
- Hohlwellenmechanisches Design über die gesamte Serie.
- Zwei Konfigurationen: 51:1 und 101:1 Übersetzungsverhältnis.
- Ausgangsgeschwindigkeit 60 U/min (51:1) oder 30 U/min (101:1).
- Nennmoment 10 Nm (51:1) oder 20 Nm (101:1); Spitzendrehmoment 25 Nm oder 45 Nm.
- Rückschlag 15 Bogensekunden.
- 48 V Versorgung, 95 W Nennleistung, 3000 U/min Nennmotordrehzahl.
- Duale Encoder mit einstufigem Absolutwert: 19-Bit pro Umdrehung.
- Treiber-Schnittstelle: EtherCAT/CAN; Stromschleife 50 kHz; Geschwindigkeitsregelung 10 kHz.
- Typische physikalische Eigenschaften des R58-Moduls: OD 58 mm, Länge 55,1 mm, Gewicht 0,43 kg, max. Geschwindigkeit 90 U/min, Schnittstelle EtherCAT/CAN.
Technische Daten
| Parameter | 51:1 | 101:1 |
|---|---|---|
| Konfiguration | 51:1 | 101:1 |
| Ausgangsgeschwindigkeit (U/min) | 60 | 30 |
| Nennmoment (Nm) | 10 | 20 |
| Spitzenmoment (Nm) | 25 | 45 |
| Spiel (Arcsec) | 15 | 15 |
| Nennspannung (V) | 48 | 48 |
| Nennleistung (W) | 95 | 95 |
| Nennspeed (U/min) | 3000 | 3000 |
| Nennstrom (A) | 3.5 | 3.5 |
| Spitzenstrom (A) | 10 | 10 |
| Encoder | Duale Encoder; Einzelumdrehung Absolutwert: 19-Bit pro Umdrehung | Duale Encoder; Einzelumdrehung Absolutwert: 19-Bit pro Umdrehung |
| Antrieb | Schnittstelle: EtherCAT/CAN; Stromschleife: 50 kHz; Geschwindigkeitsregelung: 10 kHz | Schnittstelle: EtherCAT/CAN; Stromschleife: 50 kHz; Geschwindigkeitsregelung: 10 kHz |
| Gesamtabmessungen | OD 58 mm; Länge 55,1 mm | OD 58 mm; Länge 55,1 mm |
| Gesamtgewicht | 0,43 kg | 0.43 kg |
| Typische Anwendungen | Kopf, Handgelenk, Ellenbogengelenk | Kopf, Handgelenk, Ellenbogengelenk |
Anwendungen
- Humanoide Roboter
- Roboterarme
- Exoskelette
- Quadrupedale Roboter
- AGV-Fahrzeuge
- ARU-Roboter
Handbücher
Details
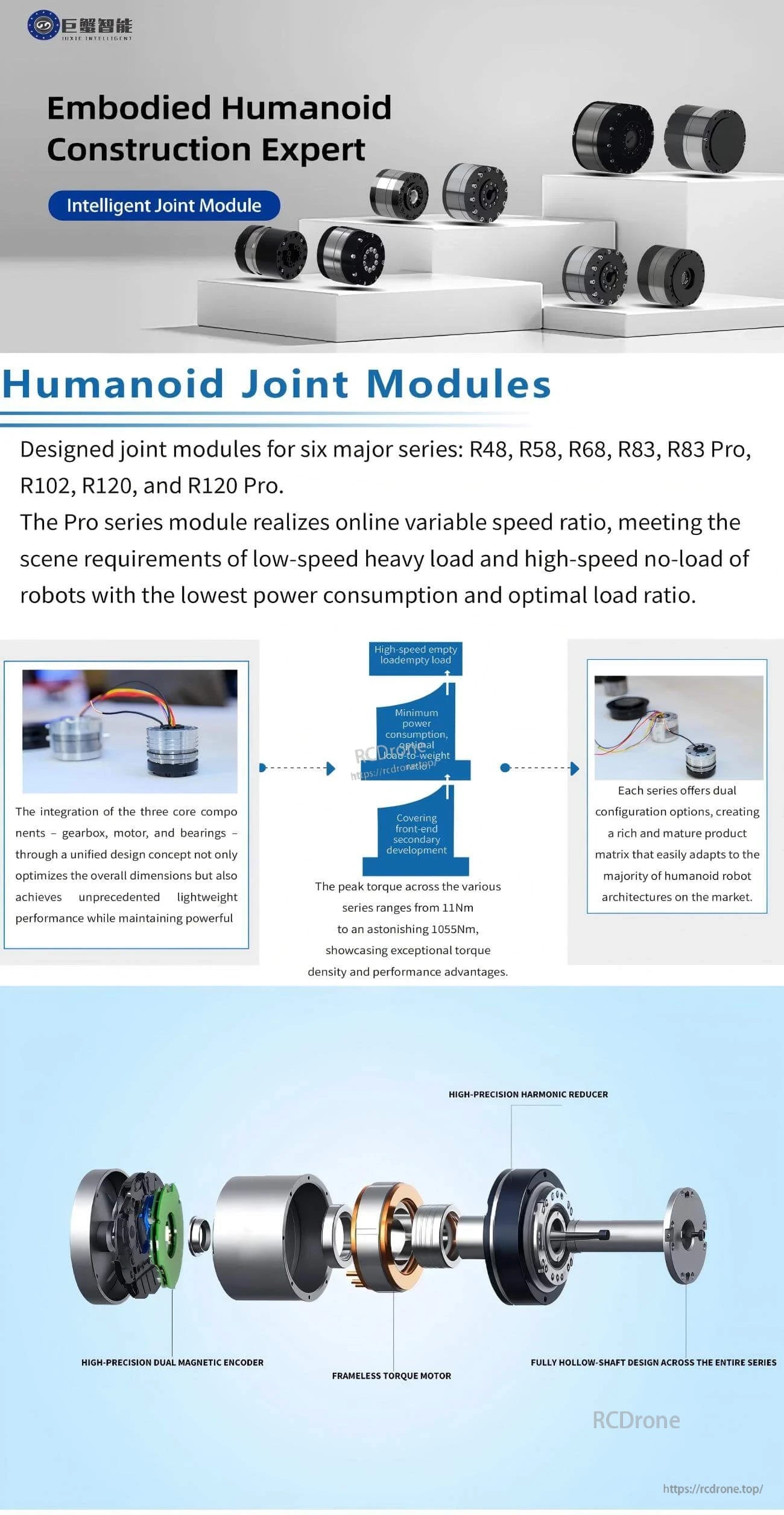
Intelligente Gelenkmodule für humanoide Roboter, ausgestattet mit hochpräzisem harmonischem Reduzierer, dualem magnetischen Encoder, rahmenlosem Drehmomentmotor und Hohlwellen-Design. Bietet variablen Übersetzungsverhältnis, niedrigen Energieverbrauch und Spitzendrehmoment von bis zu 1055Nm.

R48-Serie: 48mm Außendurchmesser, 51,5mm Länge, 0,32kg, 4Nm Drehmoment, 100 PRM, EtherCAT/CAN. R58-Serie: 58mm Außendurchmesser, 55,1mm Länge, 0.43 kg, 8 Nm Drehmoment, 90 PRM, EtherCAT/CAN. R68-Serie: 68 mm Durchmesser, 54,3 mm Länge, 0,7 kg, 5 Nm Drehmoment, 90 PRM, EtherCAT/CAN.

Related Collections

