

JUXIE INTELLIGENT CE-HM-R83 Serie, 48 V 250 W, 51:1/101:1/161:1, Dual 19-Bit-Encoder Roboter-Motor für humanoide Gelenke
JUXIE INTELLIGENT CE-HM-R83 Serie, 48 V 250 W, 51:1/101:1/161:1, Dual 19-Bit-Encoder Roboter-Motor für humanoide Gelenke
JUXIE INTELLIGENT
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Die JUXIE INTELLIGENT CE-HM-R83 Serie ist ein integriertes Roboter-Motor- und Gelenkmodul für humanoide und mobile Robotik. Es kombiniert einen hochpräzisen harmonischen Reduzierer, einen rahmenlosen Drehmomentmotor und doppelte magnetische Encoder in einem kompakten R83-Formfaktor. Drei Konfigurationen (51:1, 101:1, 161:1) bieten ein Nennmoment von bis zu 84 Nm mit 15 Bogensekunden Spiel. Der integrierte Treiber unterstützt EtherCAT/CAN mit einem 50KHz-Stromkreis und einem 10KHz-Geschwindigkeitskreis. Typische Anwendungen umfassen Schulter-, Ellenbogen-, Knie- und Hüftgelenke. Die Gesamtabmessungen betragen R83*59mm und das Gewicht liegt bei 1,1kg.
Hauptmerkmale
- Integrierter harmonischer Reduzierer + rahmenloser Drehmomentmotor + hochpräziser doppelter magnetischer Encoder.
- Doppelte Encoder mit einstufigem Absolutwert: 19-Bit pro Umdrehung.
- Übersetzungsverhältnisse: 51:1, 101:1, 161:1; Nennmoment 27/53/84 Nm, Spitzenmoment 66/120/200 Nm.
- Spiel: 15 Bogensekunden über die Konfigurationen.
- Elektrische Bewertungen: 48 V, 250 W, Nennspeed 3000 U/min, Nennstrom 6 A, Spitzenstrom 16 A.
- Treiber-Schnittstelle: EtherCAT/CAN; Stromschleife 50KHz; Geschwindigkeitsregelung 10KHz.
- Kompakt und leicht: R83*59mm, 1.1kg; Hohlwellen-Design.
Technische Daten
| Parameter | 51:1 | 101:1 | 161:1 |
|---|---|---|---|
| Ausgangsgeschwindigkeit (U/min) | 60 | 30 | 18 |
| Nennmoment (Nm) | 27 | 53 | 84 |
| Spitzenmoment (Nm) | 66 | 120 | 200 |
| Rücklaufspiel (Arcsec) | 15 | 15 | 15 |
| Nennspannung (V) | 48 | 48 | 48 |
| Nennleistung (W) | 250 | 250 | 250 |
| Nennstrom (A) | 6 | 6 | 6 |
| Nennstrom (A) | 6 | 6 | 6 |
| Peakstrom (A) | 16 | 16 | 16 |
| Encoder | Duale Encoder; Einzelumdrehung Absolutwert: 19-Bit pro Umdrehung | Duale Encoder; Einzelumdrehung Absolutwert: 19-Bit pro Umdrehung | Duale Encoder; Einzelumdrehung Absolutwert: 19-Bit pro Umdrehung |
| Treiber | Schnittstelle: EtherCAT/CAN; Stromschleife: 50KHz; Geschwindigkeitsregelung: 10KHz | Schnittstelle: EtherCAT/CAN; Stromschleife: 50KHz; Geschwindigkeitsregelung: 10KHz | Schnittstelle: EtherCAT/CAN; Stromschleife: 50KHz; Geschwindigkeitsregelung: 10KHz |
| Gesamtmaße | R83*59mm | R83*59mm | R83*59mm |
| Gesamtgewicht | 1.1kg | 1.1kg | 1.1kg |
| Typische Anwendungen | Schultergelenk, Ellbogengelenk, Kniegelenk, Hüftgelenk. | Schultergelenk, Ellbogengelenk, Kniegelenk, Hüftgelenk. | Schultergelenk, Ellbogengelenk, Kniegelenk, Hüftgelenk. |
Anwendungen
- Humanoide Roboter
- Roboterarme
- Exoskelette
- Quadrupedale Roboter
- AGV-Fahrzeuge
- ARU-Roboter
Handbücher
Details
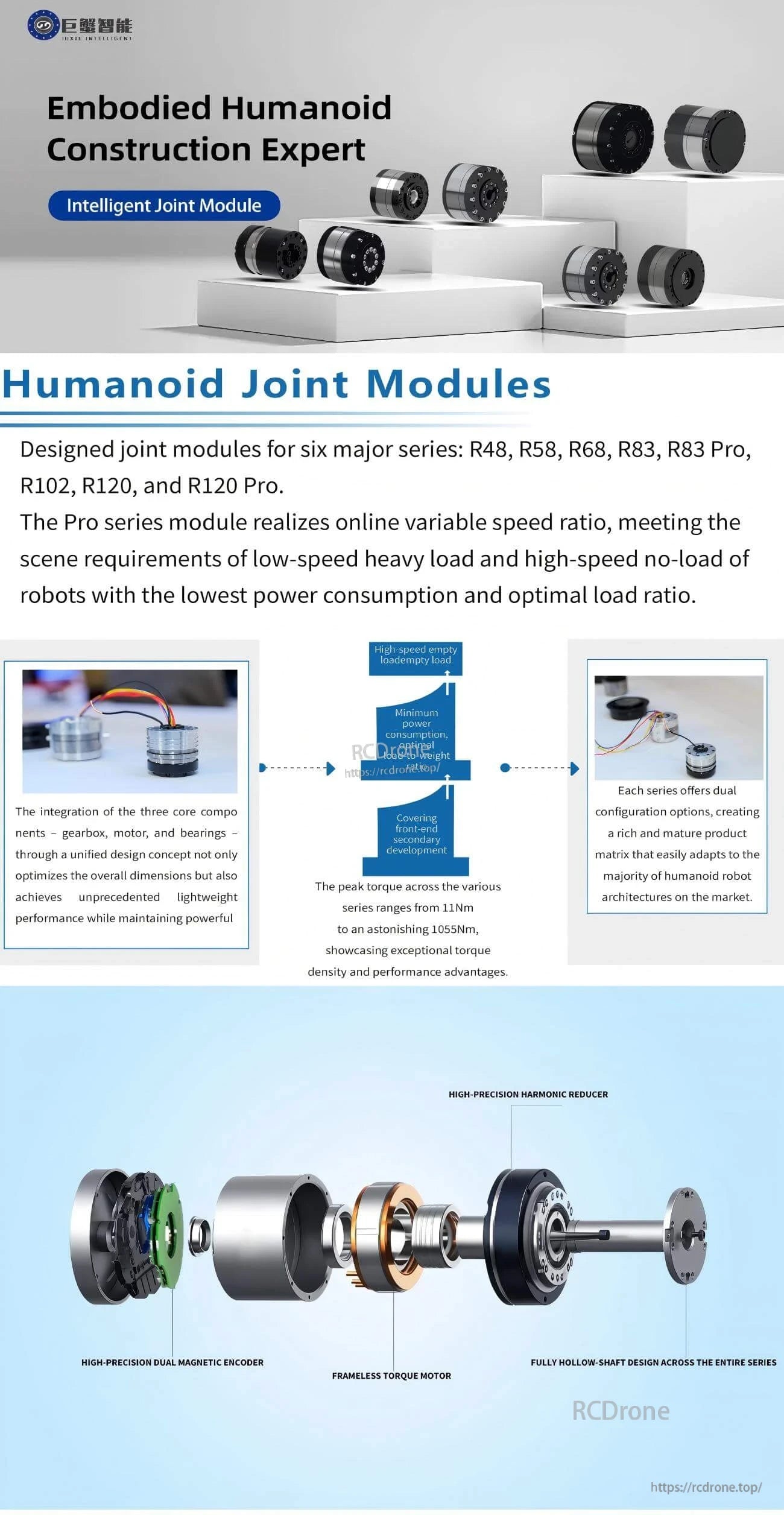
Intelligente Gelenkmodule für humanoide Roboter, ausgestattet mit hochpräzisem harmonischem Reduzierer, dualem magnetischen Encoder, rahmenlosem Drehmomentmotor und Hohlwellen-Design. Bietet variable Geschwindigkeit, niedrigen Stromverbrauch und Spitzendrehmomente von bis zu 1055Nm.

Related Collections

