













LINKERBOT Linker Hand L10 Roboterhand, 10 Freiheitsgrade, CAN/RS485-Steuerung, Schneckengetriebe, 80N Griffkraft, DC24V+/-10%
LINKERBOT Linker Hand L10 Roboterhand, 10 Freiheitsgrade, CAN/RS485-Steuerung, Schneckengetriebe, 80N Griffkraft, DC24V+/-10%
LINKERBOT
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
LINKERBOT Linker Hand L10 ist eine Roboterhand, die für geschickte Manipulation und präzise Steuerung entwickelt wurde. Sie verfügt über 10 Freiheitsgrade mit einem Schneckengetriebe und kommuniziert über CAN/RS485 für eine zuverlässige Integration in Forschungs- und Industriesysteme.
Hauptmerkmale
- 10 DoF geschickte Hand mit Schneckengetriebe für stabile Betätigung.
- Steuerinterfaces: CAN und RS485.
- Wiederholgenauigkeit der Positionierung < +/-0,2 mm; typische Öffnungs-/Schließzeit 1,2 s.
- Kraftfähigkeit: 15N maximale Daumen-Spitzenkraft, 15N maximale Vierfinger-Spitzenkraft, 80N maximale Fünf-Finger-Greifkraft.
- Steuermodi und Hilfsprogramme aus dem Produktmanual: Positionssteuerung, Geschwindigkeitssteuerung, haptisches Feedback (Kraftsteuerung) über Fingerspitzen-Sensoren und Online-Firmware-Upgrade.
- Ökosystem (pro Produktmaterialien): unterstützte Roboterarme UR, Franka, XArm, RealMan, AgileX; unterstützte Simulatoren Pybullet, Isaac, MuJoCo; Anwendungsbeispiele umfassen ROS1, ROS2, Python, C++; Datenerfassungsmethoden umfassen Teleoperationshandschuhe, Exoskelethandschuhe, flüssige Metall-Sensortechnologie, Vision und VR (Meta Quest 3).
Für Vorverkaufs- oder Integrationssupport kontaktieren Sie [email protected] or besuchen Sie https://rcdrone.top/.
Technische Daten
| Freiheitsgrade (DoF) | 10 |
| Anzahl der Gelenke | 20 (10 aktiv + 10 passiv) |
| Übertragungsmodus | Wurmgetriebeübertragung |
| Steuerungsschnittstelle | CAN/RS485 |
| Gewicht | 800g |
| Maximale Last | 25kg |
| Betriebsspannung | DC24V+/-10% |
| Stromaufnahme im Leerlauf | 0.2A |
| Durchschnittlicher Strom (Bewegung ohne Last) | 0.5A |
| Maximaler Strom | 3A |
| Wiederholgenauigkeit der Positionierung | < +/-0.2mm |
| Öffnungs-/Schließzeit | 1.2s |
| Maximale Daumen-Spitzenkraft | 15N |
| Maximale Vierfinger-Spitzenkraft | 15N |
| Maximale Fünffinger-Griffkraft | 80N |
Drucksensor
| Piezoresistives Array | 6*12 |
| Sensor-Tragfläche | 9.6*14.4mm |
| Auslöse Kraft | 5g |
| Messbereich | 20N |
| Lebensdauer | 100.000 Zyklen |
| Kommunikationsbildrate | 200FPS |
Kapazitiver Sensor (Optional)
| Abtastrate | >=50Hz |
| Messbereich | 0-30N |
| Überlastgrenze | 60N |
| Druckempfindlichkeit | 0.1N |
| Messauflösung | 0.5%FS |
| Messgenauigkeit | 2%FS |
| Druckauflösung | 0.25N |
| Richtungsauflösung | 45° |
| Erkennungsdistanz | 1cm (Metall, menschlicher Körper) |
Lieferumfang
- USB-zu-CAN-Debugging-Kabel x1
- Verbindungskabel XT30 (2+2) x1
- Netzteil x1
- Stromkabel x1
- Linker Hand L10 x1
Anwendungen
- Forschung und Ausbildung zur geschickten Manipulation mit ROS1/ROS2 und Simulatoren (Pybullet, Isaac, MuJoCo).
- Teleoperation über Handschuhe, Exoskelett-Handschuhe, flüssige Metallsensorhandschuhe, Vision und VR (Meta Quest 3).
- Präzisionsmontage, pfadbasierte Operationen, Schraubenziehen, Greifen von dünnen Blechen und allgemeine Objektbearbeitung.
Handbücher
Linker_Hand_L10_Product_Manual.pdf
Details

Die Linker Hand L10 bietet 10 DOF, präzise Bewegungen über einen Verbindungsmechanismus und maßgeschneiderte Motorsteuerungen. Unterstützt UR, Franka, ROS, Python, VR, Pybullet, CAN und mehr für vielseitige robotische Integration und Steuerung.
Die Linker Hand L10 bietet hohe Geschicklichkeit, wobei jeder Finger 4 Freiheitsgrade für präzise Operationen bietet. Ihr Multi-Sensorsystem – ausgestattet mit Kameras und E-Haut – sorgt für umfassendes Umweltbewusstsein und adaptive Interaktion. Durch die Integration in die Cloud können Benutzer die Hand schnell über einen codefreien Skill-Bibliotheks-Cloud-Service bereitstellen, was eine effiziente Anpassung ermöglicht und die betriebliche Komplexität reduziert. Zusammen unterstützen diese Fähigkeiten eine Vielzahl komplexer Anwendungen und verbessern sowohl die Präzision als auch die Benutzerfreundlichkeit, ohne umfangreiche Programmierung oder Einrichtung zu erfordern.

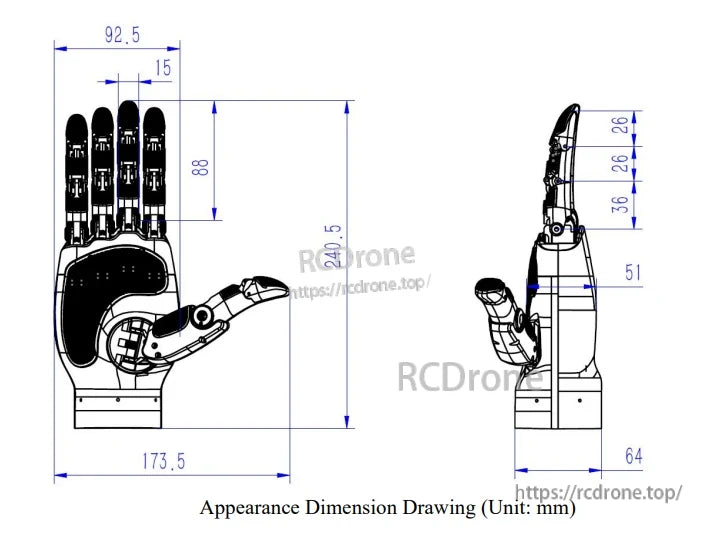
Die Abmessungen der Roboterhand in Millimetern, die Vorder- und Seitenansichten mit genauen Maßen für Design und Montage zeigen.
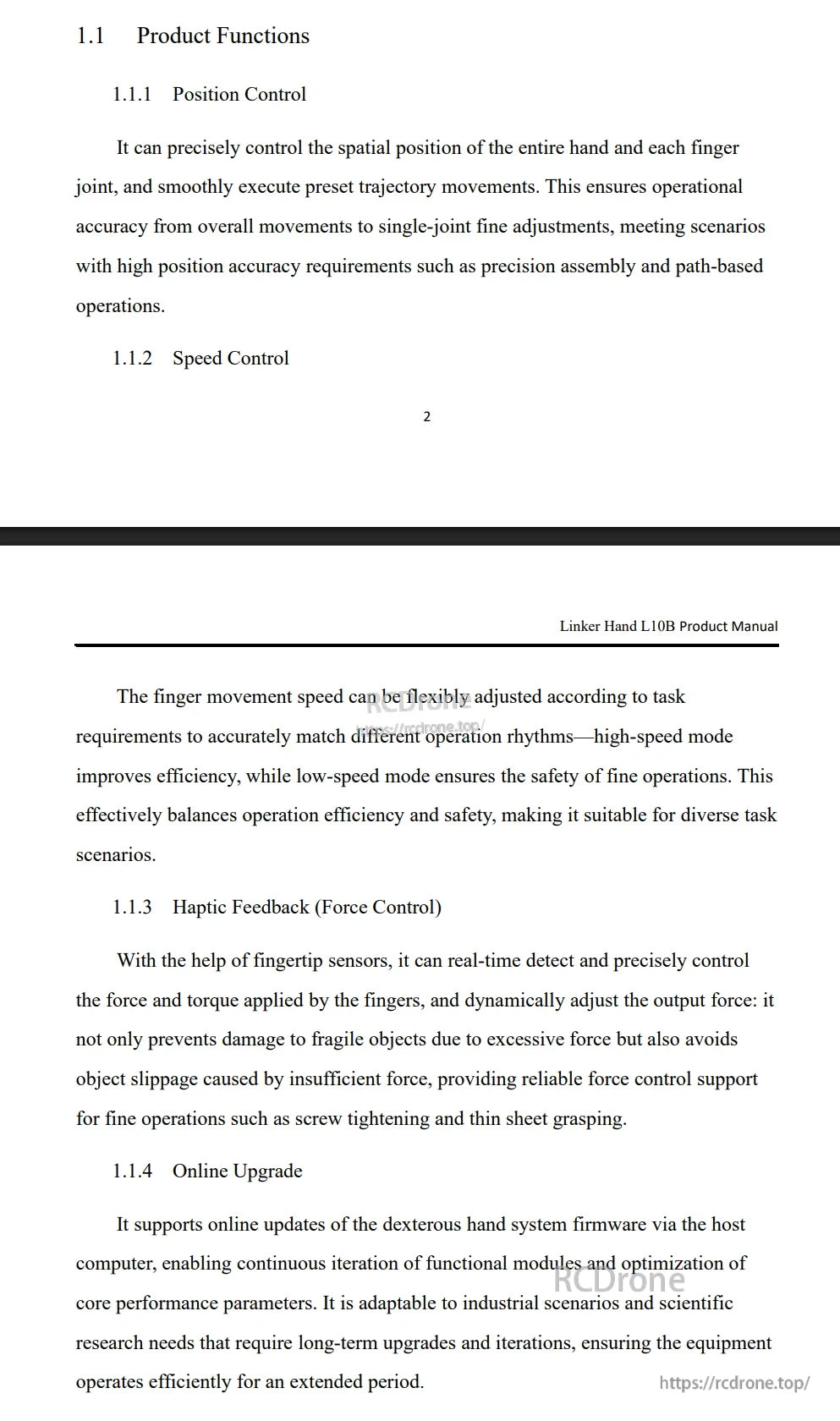
Die Linker Hand L10B bietet präzise Positions- und Geschwindigkeitskontrolle, haptisches Feedback für das Kraftmanagement und Online-Firmware-Updates. Entwickelt für Genauigkeit, Sicherheit und Anpassungsfähigkeit in industriellen und Forschungsanwendungen, die feine Manipulation und langfristige Leistung erfordern.
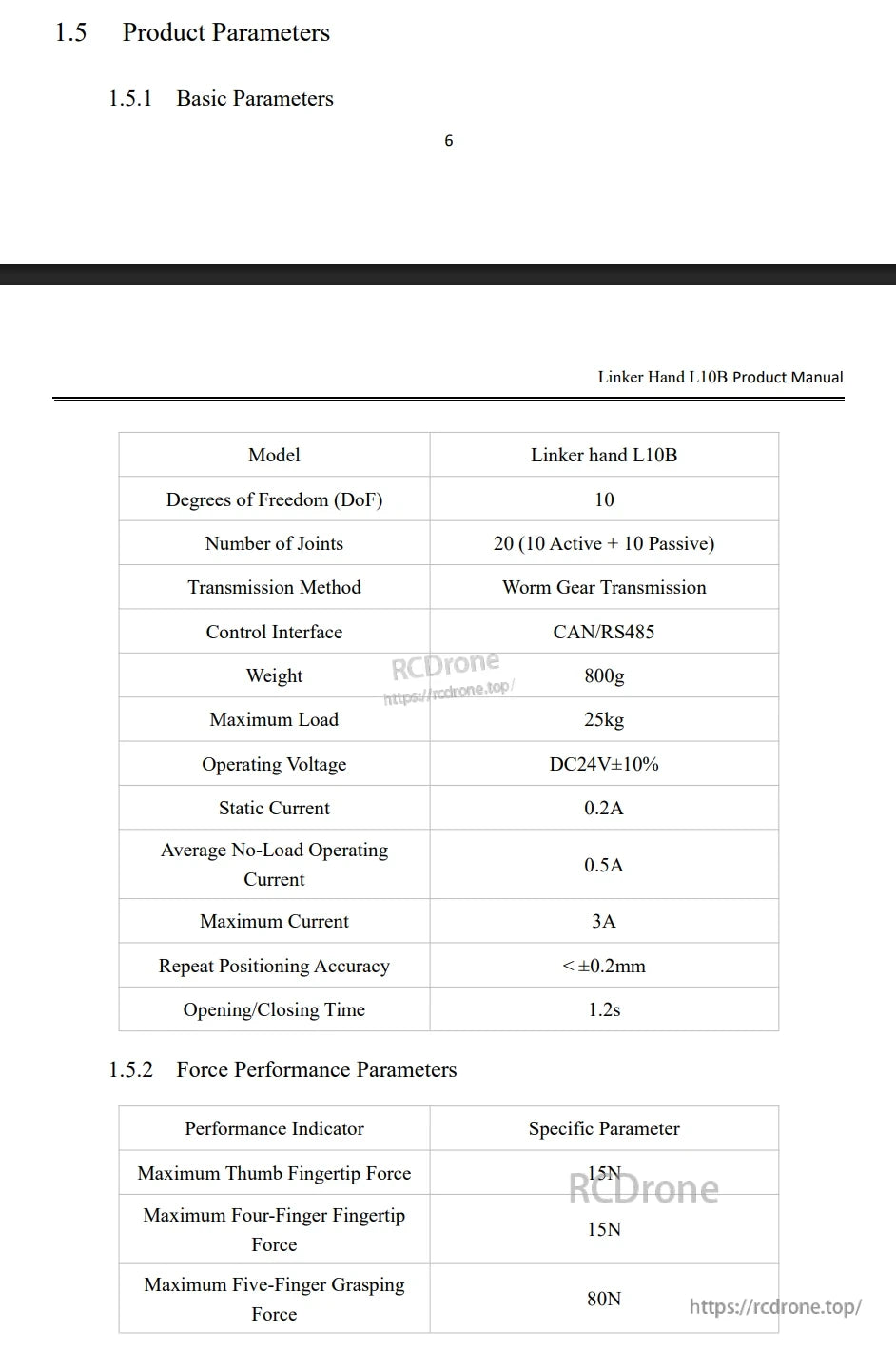
Die Linker Hand L10B bietet 10 DoF, 20 Gelenke, Schneckengetriebe und CAN/RS485-Steuerung. Mit einem Gewicht von 800 g kann sie bis zu 25 kg bei DC24V handhaben und liefert präzise Positionierungs- und Greifkräfte von bis zu 80 N.

Verfügt über ein 6x12 piezoresistives Array (20N Bereich, 100k Zyklen). Optionaler kapazitiver Sensor: ≥50Hz Abtastung, 0–30N Bereich, 45° Richtungsauflösung, erkennt Metall oder menschlichen Körper in 1 cm.
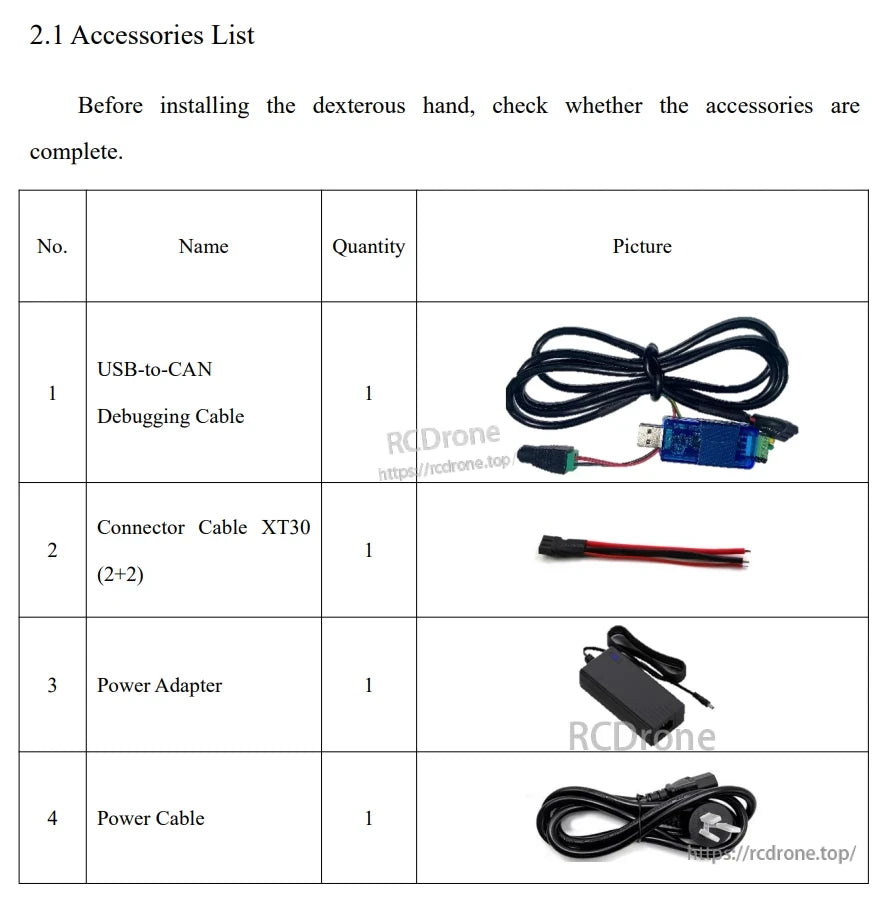
Zubehörliste für die Installation der geschickten Hand: USB-zu-CAN-Kabel, XT30-Stecker, Netzadapter und Netzkabel, jeweils eine Menge.
Related Collections













