







LINKERBOT Linker Hand L6 Roboterhand, 6 Freiheitsgrade, CAN, Gelenkantrieb, 50N Greifkraft, ±0,2mm Wiederholgenauigkeit
LINKERBOT Linker Hand L6 Roboterhand, 6 Freiheitsgrade, CAN, Gelenkantrieb, 50N Greifkraft, ±0,2mm Wiederholgenauigkeit
LINKERBOT
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
LINKERBOT Linker Hand L6 ist eine geschickte Roboterhand, die für präzise Manipulationen entwickelt wurde. Sie verfügt über 6 Freiheitsgrade (DoF) und 11 Gelenke (6 aktiv + 5 passiv) mit einer Verbindungsübertragung und CAN-Steuerungsschnittstelle. Die in den Produktbildern gezeigte Struktur hebt die ganzmetallischen Finger, verschleißfestes Silikon an den Fingerspitzen, taktile Drucksensoren mit fünf Fingern, Anzeigeleuchten, eine anti-einklemmende Gummimatte in der halben Handfläche und einen hochpräzisen elektrischen Zylinder-Direktantrieb hervor.
Hauptmerkmale
- 6 DoF geschickte Manipulation; 11 Gelenke (6 aktiv + 5 passiv).
- Verbindungsübertragung mit CAN-Bus-Steuerung.
- Wiederholgenauigkeit der Positionierung: ±0,2 mm.
- Kraftfähigkeit: maximale Spitzenkraft des Daumens 10N; maximale Spitzenkraft der vier Finger 8N; maximale Greifkraft mit fünf Fingern 50N.
- Piezoresistives taktiles Sensorsystem mit fünf Fingern zur Kontakt-/Druckmessung.
- Designmerkmale: vollmetallische Finger, verschleißfeste Silikonspitzen, Anzeigeleuchte, rutschfeste Gummipolster.
- Kompakte &und agile Anordnung; Multi-Sensorsystem (einschließlich Kameras und elektronischer Haut) und Geräte-Cloud-Integration wie in den Produktbildern dargestellt.
Für Verkaufs- und technische Unterstützung kontaktieren Sie [email protected] or besuchen Sie https://rcdrone.top/.
Spezifikationen
| Parameter | Wert |
|---|---|
| Freiheitsgrade (DoF) | 6 |
| Anzahl der Gelenke | 11 (6 aktiv + 5 passiv) |
| Übertragungsmodus | Verbindungsübertragung |
| Steuerungsschnittstelle | CAN |
| Gewicht | 623,5g |
| Maximale Last | 28kg |
| Betriebsspannung | DC24V±10% |
| Stromaufnahme im Leerlauf | 0,2A |
| Durchschnittlicher Strom (Bewegung ohne Last) | 0,75A |
| Maximaler Strom | 1,4A |
| Wiederholgenauigkeit der Positionierung | ±0.2mm |
| Maximale Spitzenkraft des Daumens | 10N |
| Maximale Spitzenkraft der vier Finger | 8N |
| Maximale Greifkraft der fünf Finger | 50N |
Bewegungsleistung
| Bewegungsteil | Winkelbereich (°) | Bewegungsgeschwindigkeit (°/s) |
|---|---|---|
| Basis des Daumens | 57 | 152.82 |
| Basis des Zeigefingers | 72.30 | 213.27 |
| Basis des Mittelfingers | 72.90 | 208.29 |
| Basis des Ringfingers | 73.10 | 202.49 |
| Basis des kleinen Fingers | 72.60 | 201.11 |
| Spitze des Daumens | 69.90 | 192.84 |
| Spitze des Zeigefingers | 64,60 | 192,84 |
| Spitze des Mittelfingers | 65,10 | 185,32 |
| Spitze des Ringfingers | 66,90 | 185,32 |
| Spitze des kleinen Fingers | 66,70 | 184,76 |
| Seitenbewegung des Daumens | 80 | 235,29 |
| Öffnungs- und Schließzeit | - | 0,35s |
Sensoren
| Parameter | Technische Spezifikation |
|---|---|
| Piezoresistives Array | 6*12 |
| Sensor-Kraftträgerfläche | 9,6*14.4mm |
| Auslöse Kraft | 5g |
| Messbereich | 20N |
| Lebensdauer | 100.000 Zyklen |
| Kommunikationsbildrate | 200FPS |
| Wertbereich | 0~4095 |
Abmessungen
| Definition | Parameter (mm) |
|---|---|
| Länge vom Mittelfinger-Spitze bis zur Handfläche | 190,7 |
| Maximale Handflächenbreite | 121 |
| Länge vom Daumen-Spitze bis zur Handfläche | 134,3 |
| Handgelenkshöhe | 9.5 |
| Handgelenkdurchmesser | 60 |
Was ist enthalten
- USB‑zu‑CAN-Debugging-Kabel x1
- Verbindungskabel XT30 (2+2) x1
- Netzadapter x1
- Netzkabel x1
- Linker Hand L6 x1
Anwendungen
- Präzises Greifen und Handhaben von Objekten
- Werkzeuggreifen und -manipulation
- Komponenten-Pick-and-Place-Aufgaben
Handbücher
Linker Hand L6 Produktmanual (PDF)
Details


Hochleistungsfähige, geschickte Roboterhand mit 6 Freiheitsgraden. Bietet kompakte Agilität, ein Multi-Sensorsystem und Geräte-Cloud-Integration für präzise Steuerung, Anpassung an die Umgebung und codefreie Anpassung über die Cloud-Fähigkeitsbibliothek.



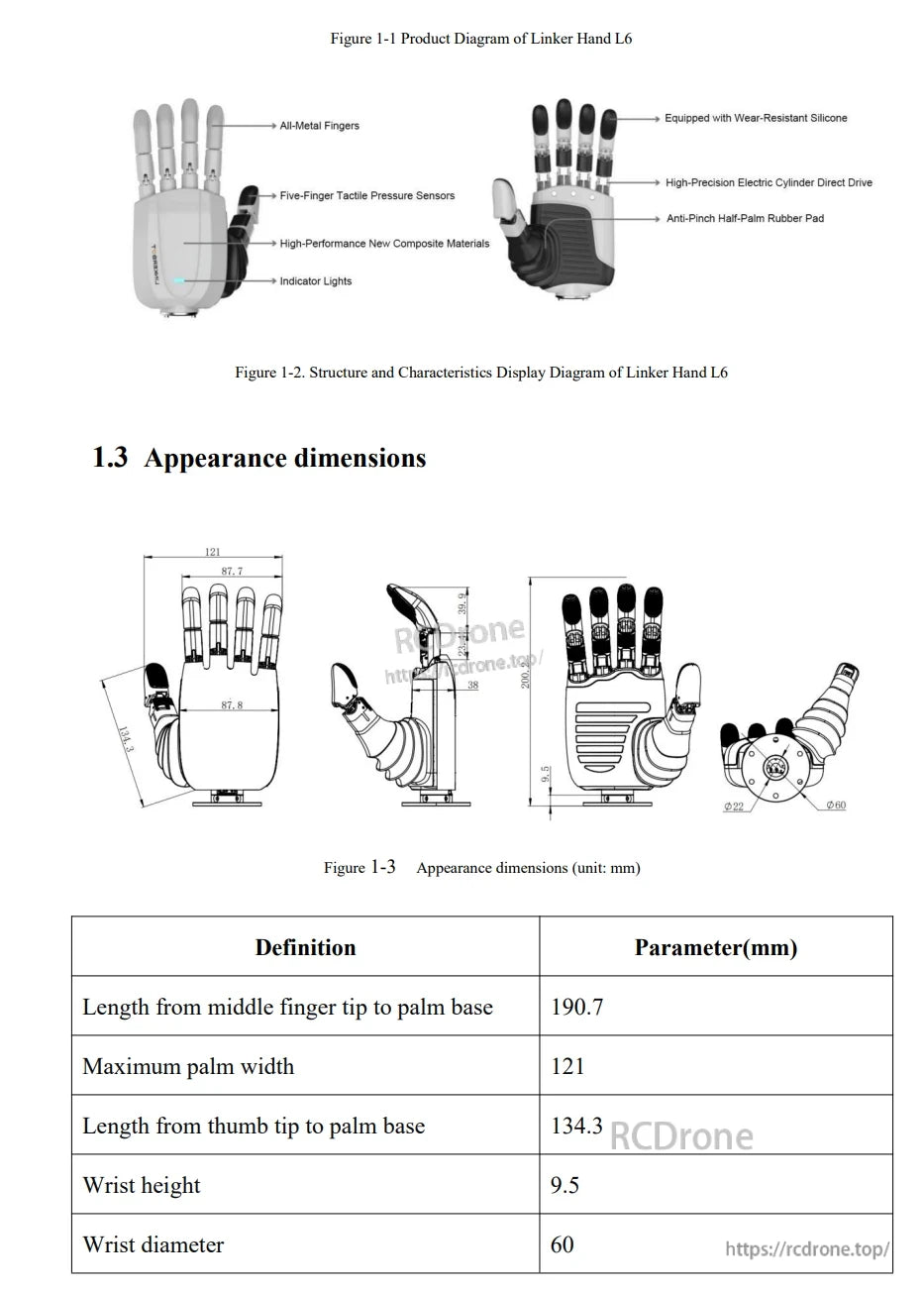
Die Linker Hand L6 verfügt über vollmetallische Finger, taktile Sensoren, verschleißfestes Silikon, elektrischen Zylinderantrieb und eine gummierte Anti-Quetsch-Platte. Fingerlänge: 190,7 mm; Handflächenbreite: 121 mm; Handgelenkdurchmesser: 60 mm.
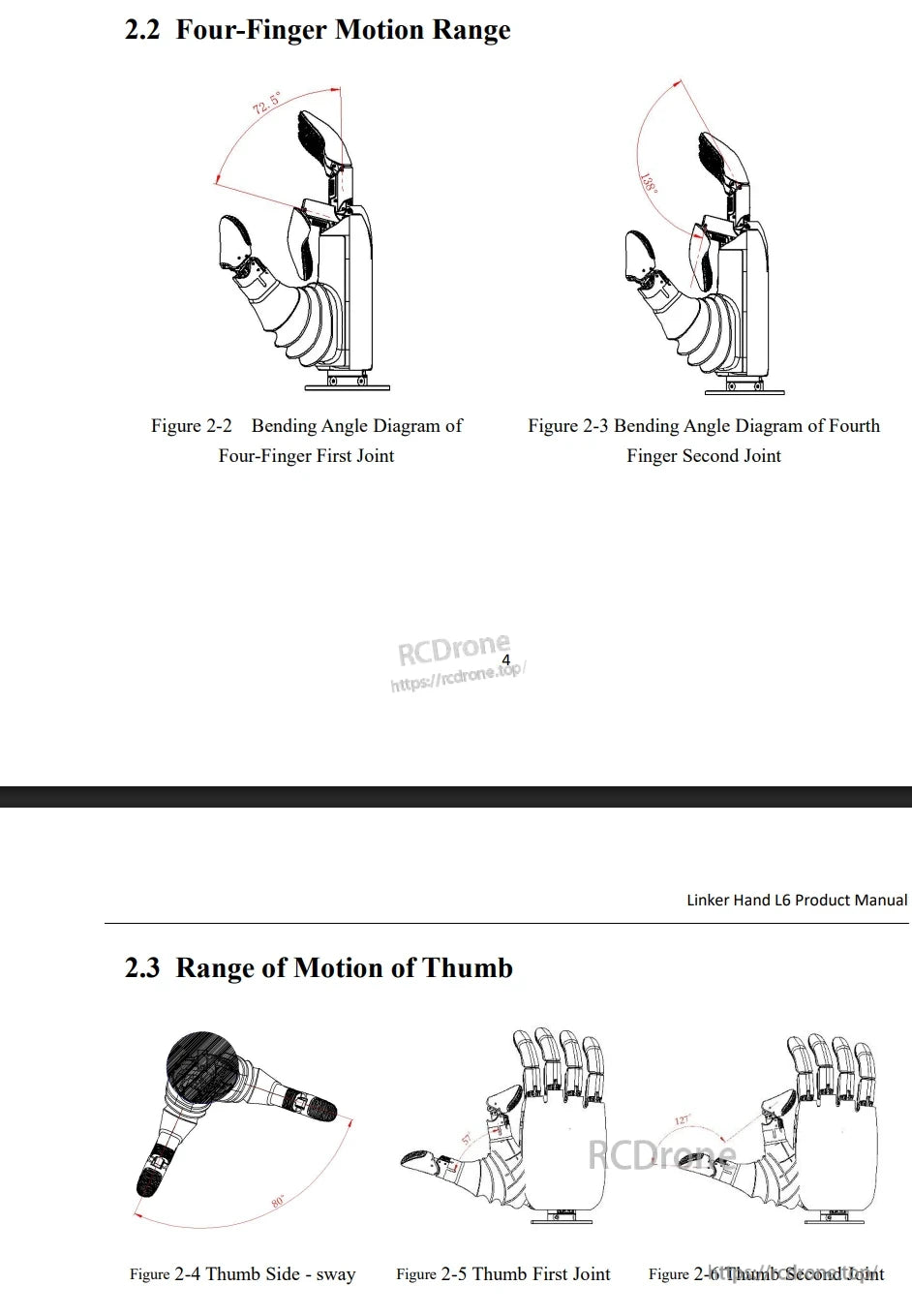
Bewegungsbereiche der Finger- und Daumengelenke: vier Finger erstes Gelenk 72,5°, zweites Gelenk 138°; Daumen seitliches Schwenken 80°, erstes Gelenk 57°, zweites Gelenk 127°.
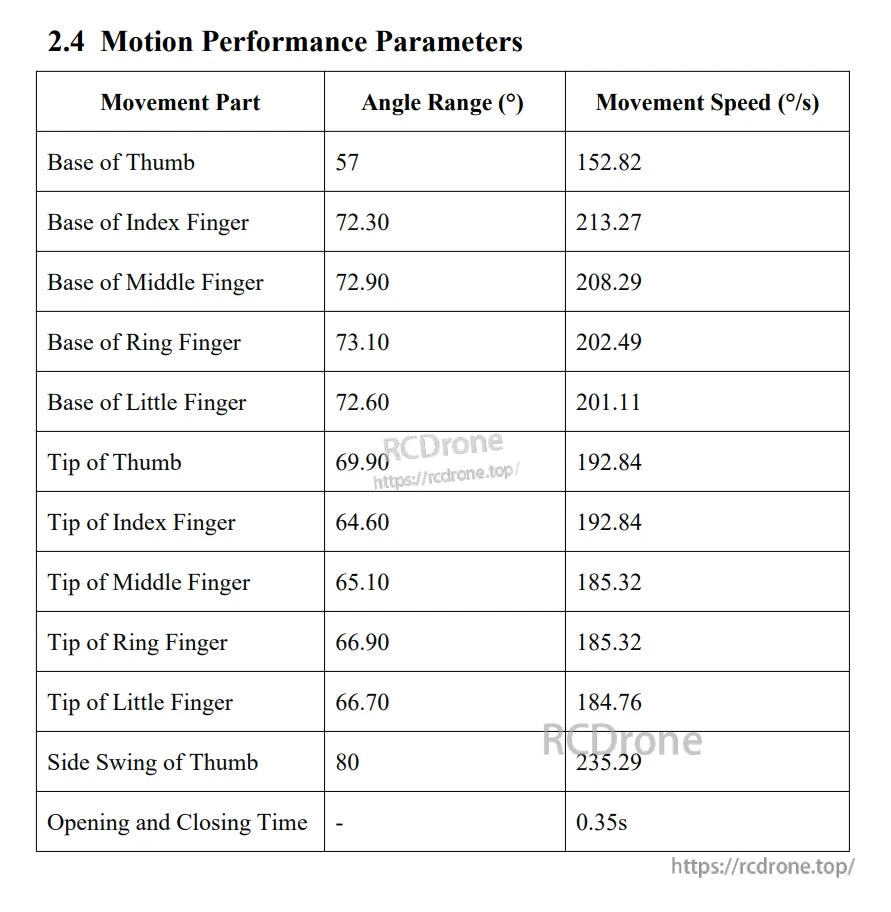
Bewegungsparameter der Roboterhand: Daumenschwenk bei 235,29°/s, Öffnen/Schließen in 0,35 Sekunden – zeigt präzise Artikulation mit detaillierten Gelenkwinkelbereichen und Geschwindigkeiten.
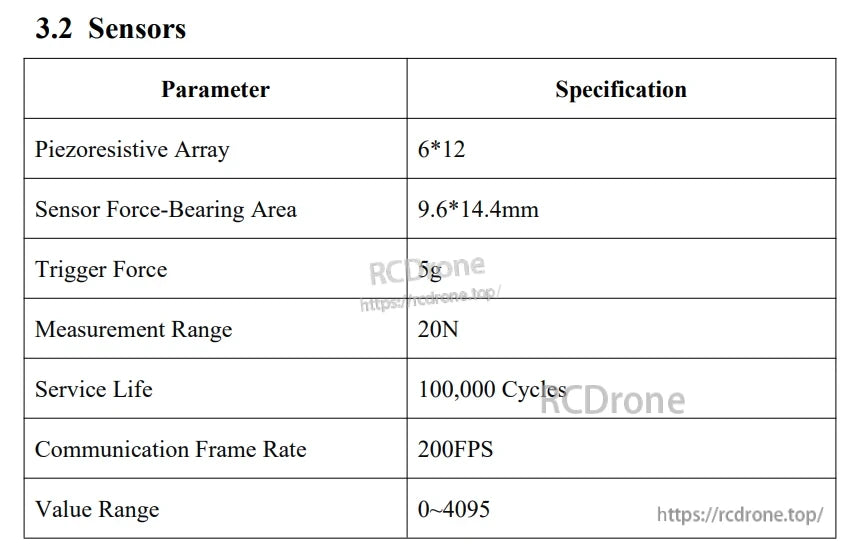
Sensor-Spezifikationen: 6x12 Array, 9,6x14,4 mm Fläche, 5g Auslöser, 20N Bereich, 100k Zyklen, 200FPS, 0-4095 Wertebereich.
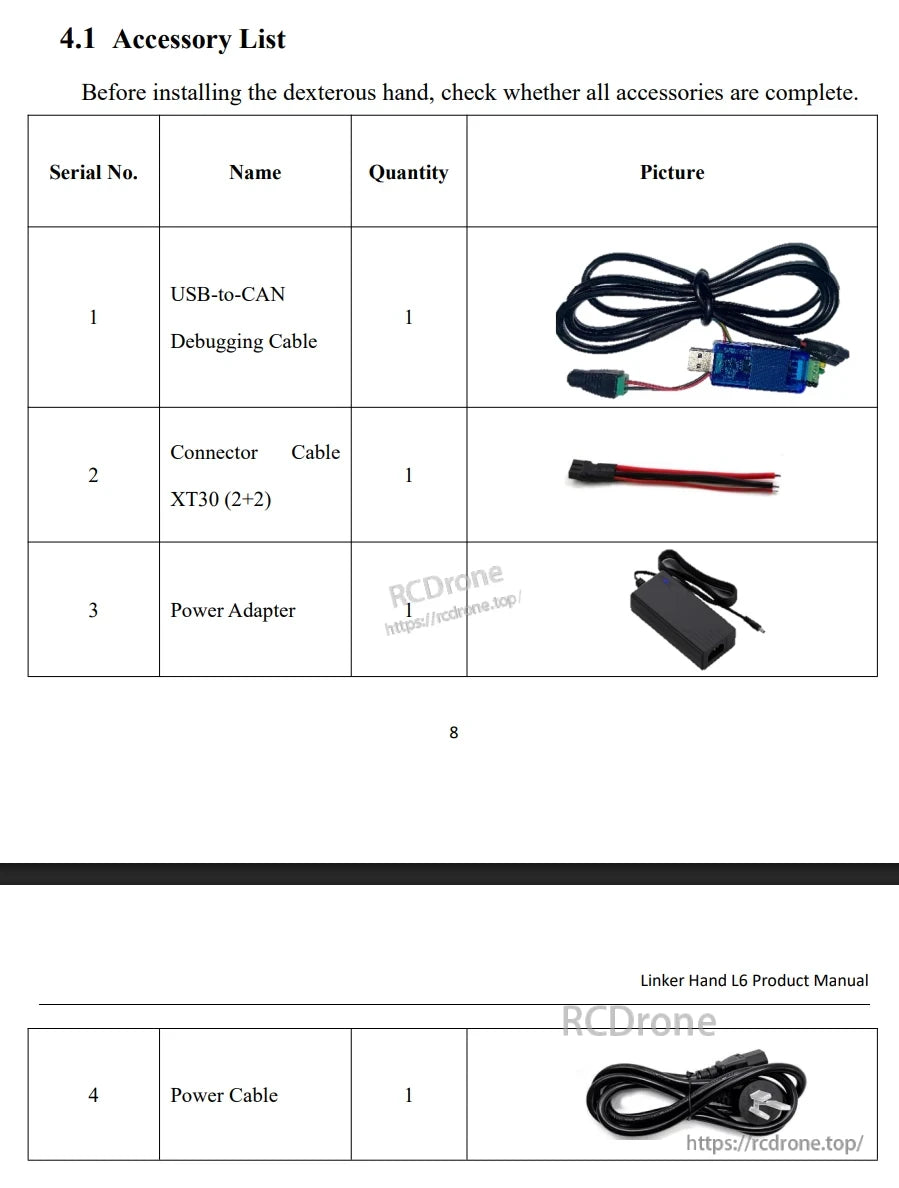
Zubehörliste für die Linker Hand L6: USB-zu-CAN-Kabel, XT30-Stecker, Netzadapter und Netzkabel. Überprüfen Sie die Vollständigkeit vor der Installation.
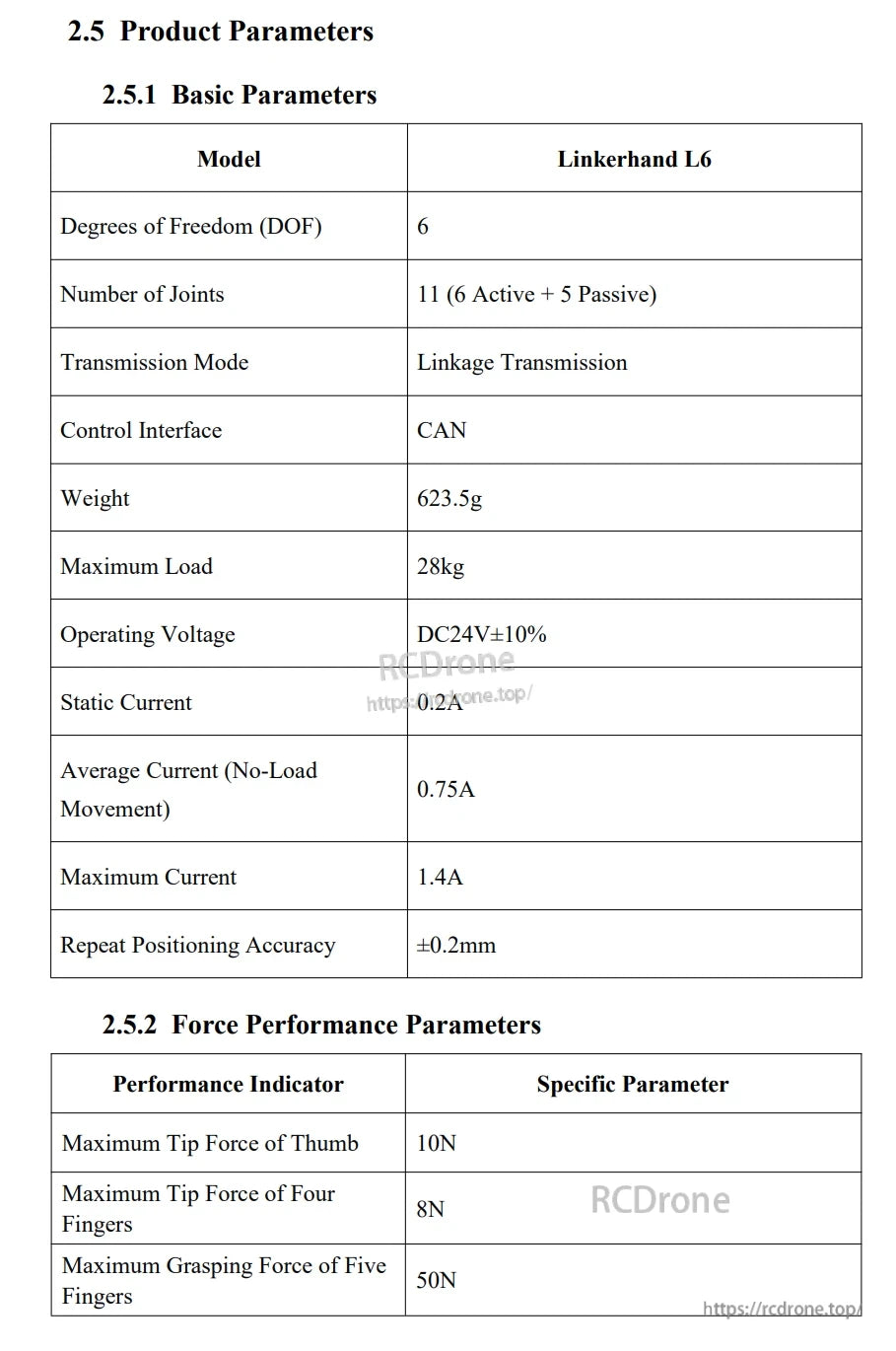
Die Linkerhand L6 Roboterhand hat 6 DOF, 11 Gelenke, CAN-Steuerung, wiegt 623,5 g, bewältigt eine maximale Last von 28 kg, läuft mit DC24V±10%, bietet eine Präzision von ±0,2 mm und liefert eine Greifkraft von bis zu 50N.
Related Collections







