







LINKERBOT Linker Hand O6 Roboterhand, 6 Freiheitsgrade, 11 Gelenke, CAN/RS485, 130N Griffkraft, ±0,2mm Genauigkeit, DC24V±10%
LINKERBOT Linker Hand O6 Roboterhand, 6 Freiheitsgrade, 11 Gelenke, CAN/RS485, 130N Griffkraft, ±0,2mm Genauigkeit, DC24V±10%
LINKERBOT
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
LINKERBOT Linker Hand O6 ist eine Roboterhand, die für kompakte Integration und präzise Manipulation entwickelt wurde. Sie bietet 6 DoF mit 11 Gelenken (6 aktiv + 5 passiv), ein Schneckengetriebe für stabile Betätigung, CAN/RS485-Steuerung und optionale taktile Sensorik. Die geschickte Struktur liefert bis zu 130N Greifkraft mit fünf Fingern und einer Wiederholgenauigkeit von ±0,2 mm bei einer Betriebsspannung von DC24V±10%. Das leichte Gewicht von 370g und der kleine Platzbedarf unterstützen die Logistikabwicklung, die industrielle Montage und Szenarien mit unregelmäßig geformten Greifobjekten.
Hauptmerkmale
Kompakt &und Agil
Kompakte Bauweise reduziert die Geräbelast und erhöht die Flexibilität für präzises Greifen in engen Räumen.
Hohe Haltbarkeit
Aus Aluminiumlegierung gefertigt, bietet es leichtes Gewicht, Stärke und Verschleißfestigkeit und unterstützt eine langfristig stabile Leistung.
Gerät-Cloud-Integration
Die Gerät-Cloud-Integration ermöglicht eine schnelle Bereitstellung über eine cloudbasierte Skill-Bibliothek mit vereinfachter Bedienung und Anpassung.
Spezifikationen
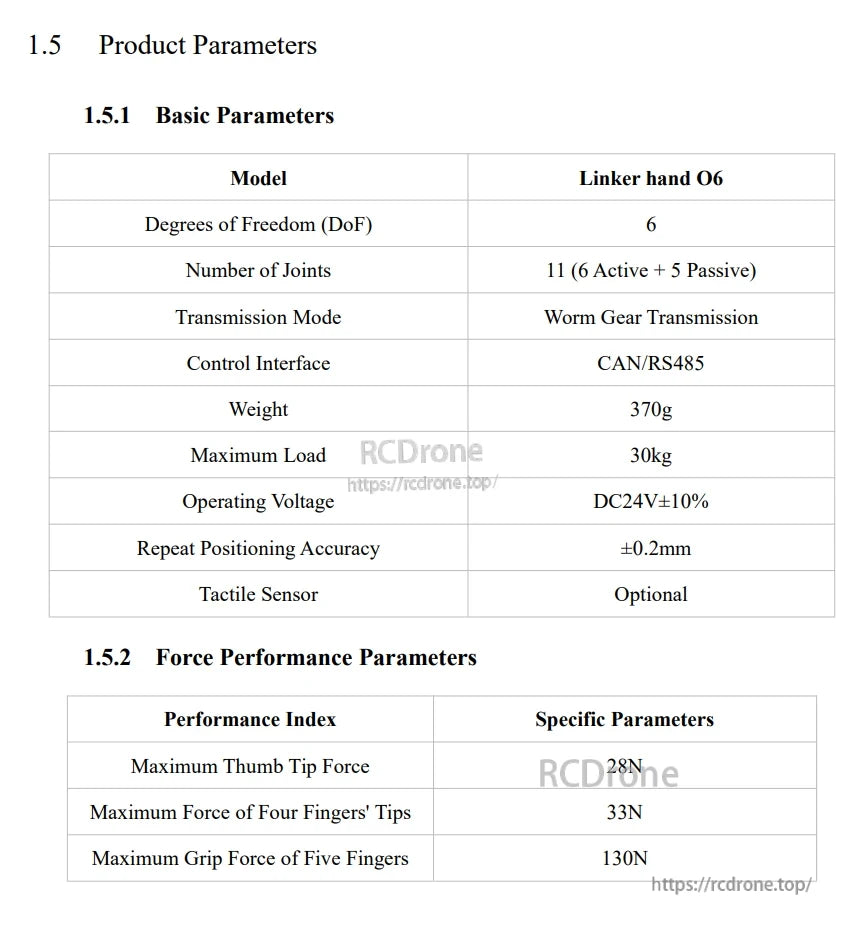
| Modell | LINKERBOT Linker Hand O6 |
| Freiheitsgrade (DoF) | 6 |
| Anzahl der Gelenke | 11 (6 aktiv + 5 passiv) |
| Übertragungsmodus | Wurmgetriebeübertragung |
| Steuerungsschnittstelle | CAN/RS485 |
| Gewicht | 370g |
| Maximale Last | 30kg |
| Betriebsspannung | DC24V±10% |
| Wiederholgenauigkeit der Positionierung | ±0.2mm |
| Taktile Sensor | Optional |
| Maximale Daumenspitzenkraft | 28N |
| Maximale Kraft der vier Fingerspitzen | 33N |
| Maximale Greifkraft von fünf Fingern | 130N |
| Abmessungen (Erscheinung) | Höhe 177mm; Breite 76.5mm; Dicke 40mm |
Bewegungsbereich
| LF2, RF2, MF2, FF2 (Beugung) | 90° |
| LF1, RF1, MF1, FF1 (Beugung) | 80° |
| DAUMEN1 (Beugung) | 55° |
| DAUMEN2 (Beugung) | 30° |
| DAUMEN3 (Seite - Schwenken) | 88° |
Was ist enthalten
- USB-zu-CAN Debugging-Kabel ×1
- Verbindungskabel XT30 (2+2) ×1
- Netzadapter ×1
- Netzkabel ×1
- Linke Hand O6 x1
Für Verkaufs- oder technische Unterstützung kontaktieren Sie [email protected] or besuchen Sie https://rcdrone.top/.
Anwendungen
- Logistikabwicklung und Materialtransfer
- Industrielle Montage und Werkzeugmanipulation
- Stabiles Greifen von unregelmäßigen Formen und Konsumgütern
Handbücher
Linker_Hand_O6_Product_Manual.pdf
Details

Linker Hand O6 bietet 6 aktive und 5 passive Gelenke für einen präzisen, starken Griff. Kompaktes, langlebiges Aluminiumdesign eignet sich für Logistik, Montage und unregelmäßiges Greifen. Verfügt über Cloud-Integration für einfaches KI-Training ohne Programmierung.


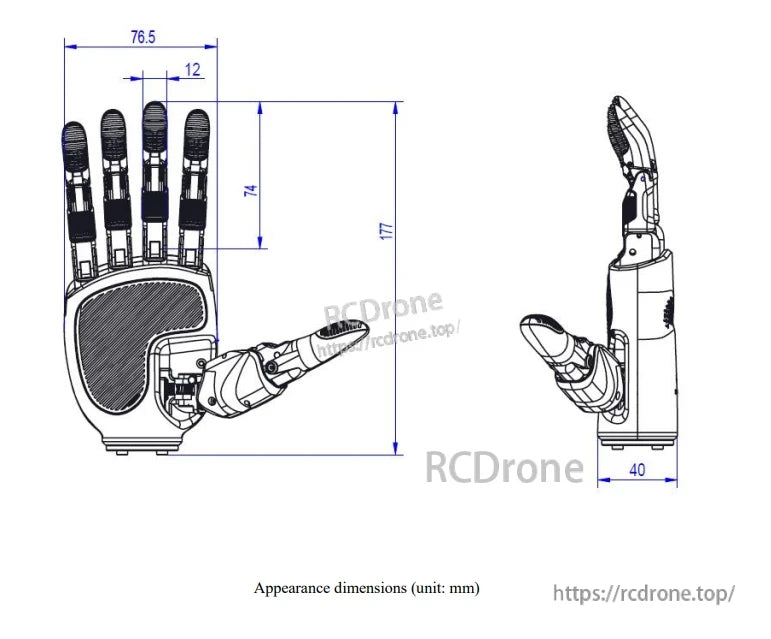
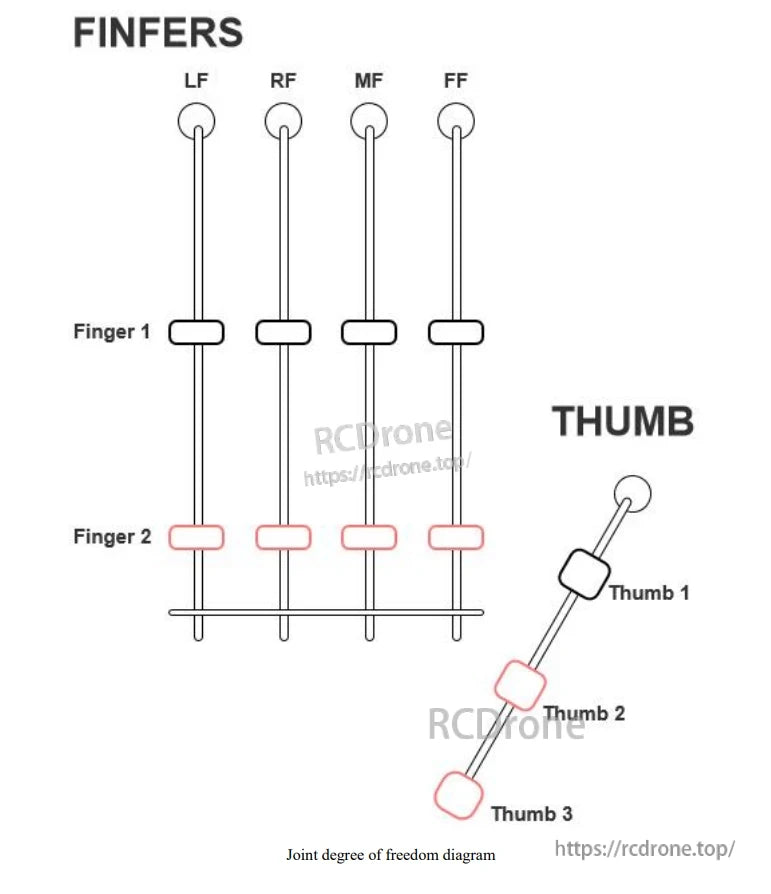
Diagramm der Freiheitsgrade von Fingern und Daumengelenken
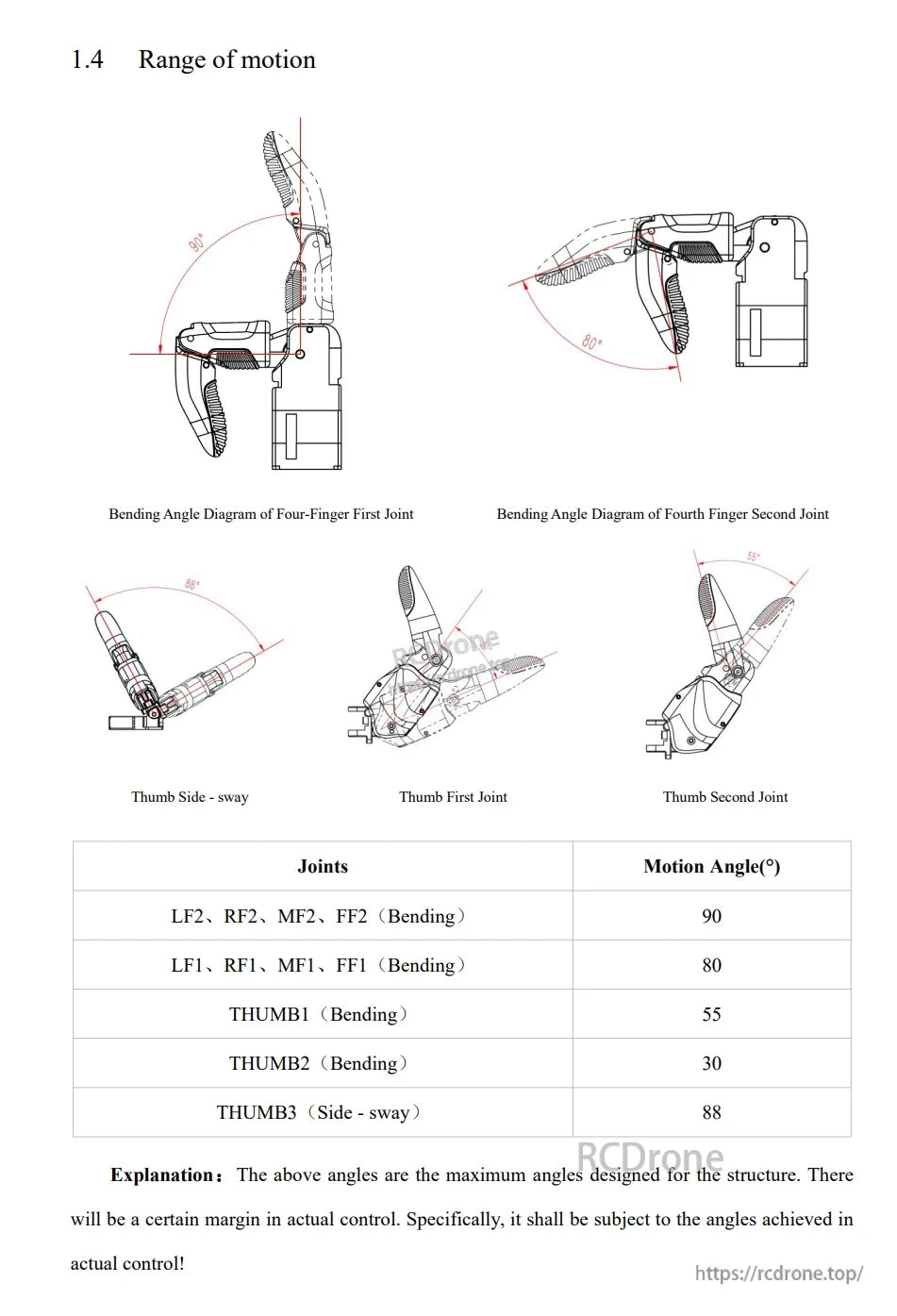
Finger beugen sich 80–90°, der Daumen beugt sich 30–55°, und die seitliche Schwingung erreicht 88°. Dies sind die maximalen Entwurfswinkel; die tatsächliche Steuerung kann leicht variieren.
Die Linker Hand O6 Roboterhand hat 6 DoF, 11 Gelenke, Schneckengetriebe, CAN/RS485 Steuerung, wiegt 370g, bewältigt eine maximale Last von 30kg, arbeitet bei DC24V±10%, hat eine Genauigkeit von ±0,2mm und bietet optionale taktile Sensoren mit spezifizierter Kraftleistung.

Zubehörliste für die Installation der geschickten Hand: USB-zu-CAN-Kabel, XT30-Stecker, Netzadapter und Netzkabel—jeweils eine Menge.
Related Collections







