



LKMTECH MF4005-V2 Motor 12V RS485/CAN 18bit Magnetischer Encoder DF40V2 Antriebsoption für Robotik
LKMTECH MF4005-V2 Motor 12V RS485/CAN 18bit Magnetischer Encoder DF40V2 Antriebsoption für Robotik
LKMTECH
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
LKMTECH MF4005-V2 ist ein Motor, der für integrierte mechatronische Anwendungen entwickelt wurde, die ein leichtes Design, hohe Steuerungsgenauigkeit und hohe Drehmomentausgabe erfordern. Das Update MF4005 V2 hebt hervor: Encoderauflösung von 14-Bit auf 18-Bit aktualisiert, Optimierung des Ruckmoments, Unterstützung von PWM-Eingängen und CAN/RS485-Kommunikation mit mehreren Baudratenauswahlmöglichkeiten.
Hauptmerkmale
- Integriertes Design: mechanisch-elektrische Integration
- Leichtbauweise: flaches Design aus Aluminiumlegierungen der Luft- und Raumfahrt
- Hohe Steuerungsgenauigkeit: magnetischer Encoder (MF4005 V2-Update zeigt 14-Bit auf 18-Bit aktualisiert)
- Hohe Drehmomentausgabe: Hochleistungs-RbFeB-Dauermagnet
- Unterstützt PWM-Eingang
- Kommunikation: CAN oder RS485
- Antriebsfunktionen: kann zwischen Drehmomentmodus, Geschwindigkeitsmodus und Positionsmodus wechseln
- Hauptsteuerung: 32-Bit Cortex-M4 ARM Hochleistungsprozessor (Antrieb)
- Echtzeitüberwachung der Stator-Temperatur (Antrieb)
- Antriebsleistungsstufe: Vollbrückenschaltung mit niedrigem Innenwiderstand und hohem Strom
- 18-Bit-Einzelumdrehungs-Absolute-Wert-Magnetencoder (Antriebsmerkmaltext); eine Kalibrierung, Nullposition geht nie verloren
- Motorbauhinweise: Außenläufer; Permanentmagnet-Multistufen-Bogen-Design; kleinerer Luftspalt; radiale Magnetisierung; 0.2 mm Siliziumstahlblech; Klasse H isolierter emaillierter Draht; SH-Grad NdFeB
- OEM/ODM-Service (keine Produktspezifikation)
- Parameter-Software: Programmiersoftware zur Anpassung von Parametern, Test und Upgrade; unterstützt Open-Source-Entwicklung wie PC, MCU, PLC, ICP und RPi
Anwendungsszenarien
- Humanoide Roboter
- Roboterarme
- Exoskelette
- Quadruped-Roboter
- AGV-Fahrzeuge
- ARU-Roboter
- Kamera PTZ
- Laser Lidar
- Inspektionsroboter für Kraftwerke
- Industrielle Inspektion
Technische Daten
Motor Modell: MF4005-V2
| Parameter | Wert (25 Umdrehungen) | Wert (40 Umdrehungen) |
|---|---|---|
| Artikelname | MF4005-V2 | MF4005-V2 |
| Umdrehungen | 25 | 40 |
| Nennspannung | 12V | 12V |
| Maximale Geschwindigkeit | 2390U/min | 1300U/min |
| Nennmoment | 0.07 N.m | 0.06 N.m |
| Bewertete Geschwindigkeit | 1600U/min | 700U/min |
| Bewerteter Strom | 1.44A | 0.81A |
| Maximale Leistung | 14W | 4.6W |
| Maximales Drehmoment | 0.25 N.m | 0.12 N.m |
| Geschwindigkeitskonstante | 133 U/min/V | 58 U/min/V |
| Drehmomentkonstante | 0.05 N.m/A | 0.07 N.m/A |
| Wicklungstyp | Y | Y |
| Phasenwiderstand | 1.9Ω | 4.3Ω |
| Phaseninduktivität | 0.5mH | 1.2mH |
| Motorpolung | 26 | 26 |
| Rotorträgheit | 56 gcm² | 56 gcm² |
| Motortemperatur | JA | JA |
| Lagerrated Belastung | 140N | 140N |
| Motorgewicht | 65g | 65g |
| Empfohlener Antrieb | DF40V2 | DF40V2 |
| Antriebseingangsspannung | 7.4-32V | 7.4-32V |
| Kommunikation | RS485 ODER CAN | RS485 ODER CAN |
| Kommunikationsfrequenz | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) |
| Encoder | 18-Bit Magnet-Encoder | 18-Bit Magnet-Encoder |
| Encoder Baudrate (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| Steuermodus | Drehmomentregelung (24KHz) / Geschwindigkeitsregelung (8KHz) / Positionsregelung (8KHz) | Drehmomentregelung (24KHz) / Geschwindigkeitsregelung (8KHz) / Positionsregelung (8KHz) |
| Beschleunigungskurve | Trapezförmige Beschleunigung | Trapezbeschleunigung |
Schnittstellendefinition
ID-Schalter: ID-SCHALTER
| Schnittstelle | Hinweis |
|---|---|
| A/L | RS485-A oder CAN-L |
| B/H | RS485-B oder CAN-H |
| V+ | Positive Stromversorgung |
| V+ | Positive Stromversorgung |
| V- | Negative Stromversorgung |
| V- | Negative Stromversorgung |
| T | UART-Sender |
| R | UART-Empfänger |
| G | Signal GND |
Für Vorverkaufs- oder Integrationsunterstützung (RS485/CAN-Setup, Baudratenauswahl und CAD-Dateien) kontaktieren Sie [email protected] or besuchen Sie https://rcdrone.top/.
Handbücher / Dateien
Details

MF4005‑V2 integriert Motor-, Encoder- und Antriebsfunktionen für kompakte Robotik-Bauten, mit einem verbesserten 18-Bit-Magnetencoder und CAN/RS485 Kommunikationsoptionen.
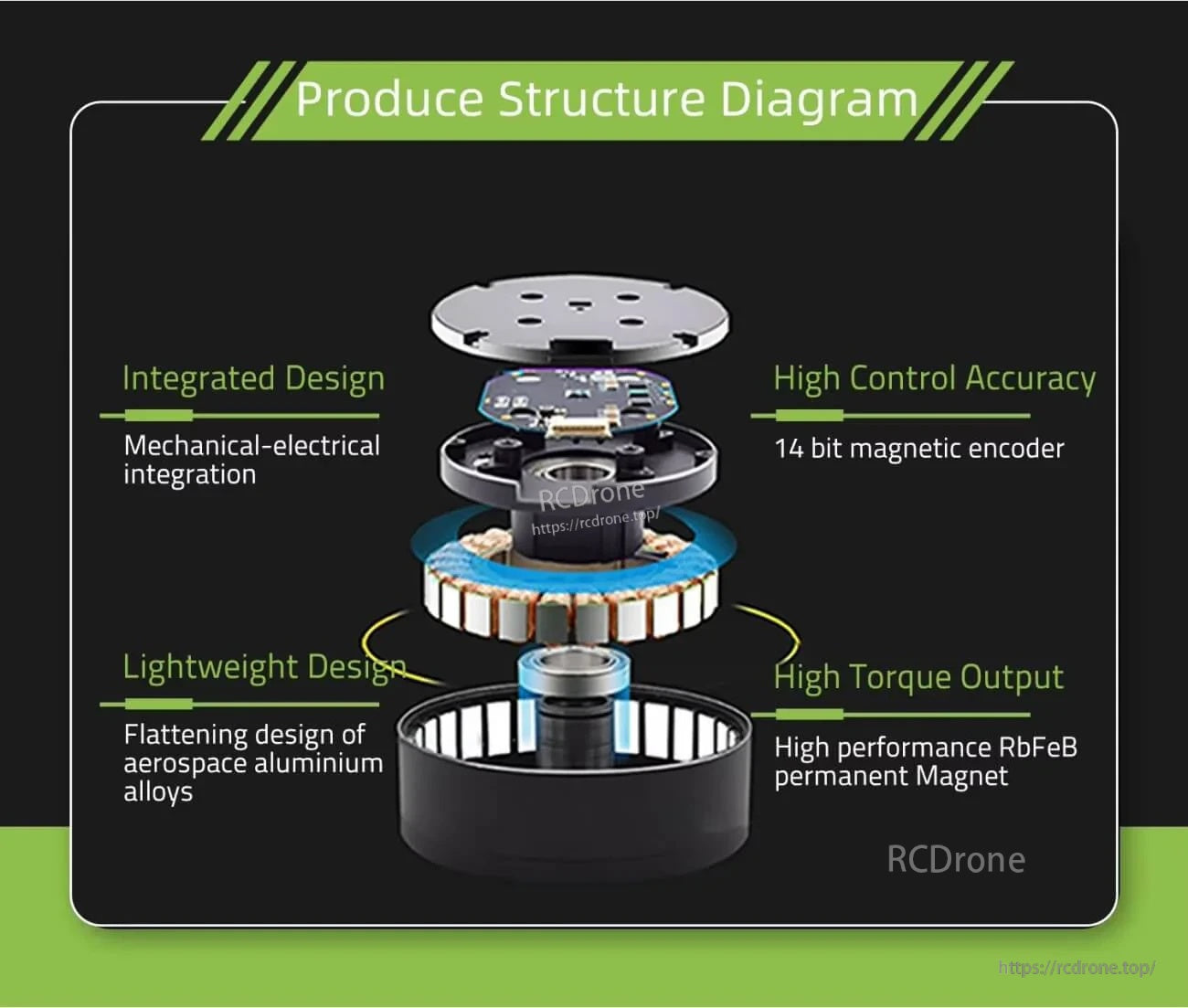
Eine integrierte, leichte Konstruktion kombiniert die Antriebselektronik mit der Motorbaugruppe, um eine präzise Steuerung und hohe Drehmomentausgabe zu unterstützen.
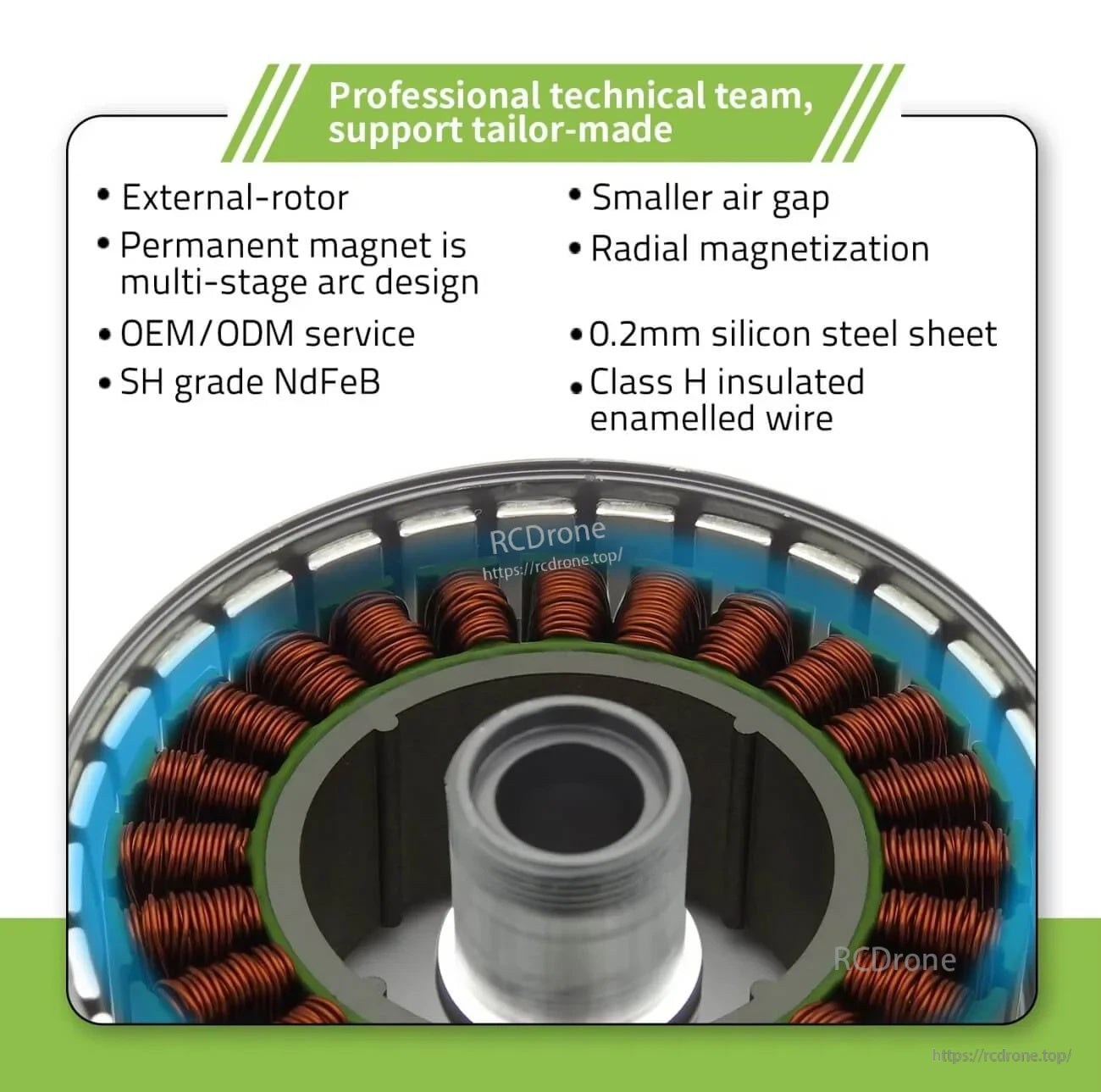
Das Außenläuferdesign und das dichte Wicklungslayout helfen, Größe, Reaktionsfähigkeit und Drehmoment für robotische Gelenke und Aktuatoren auszubalancieren.
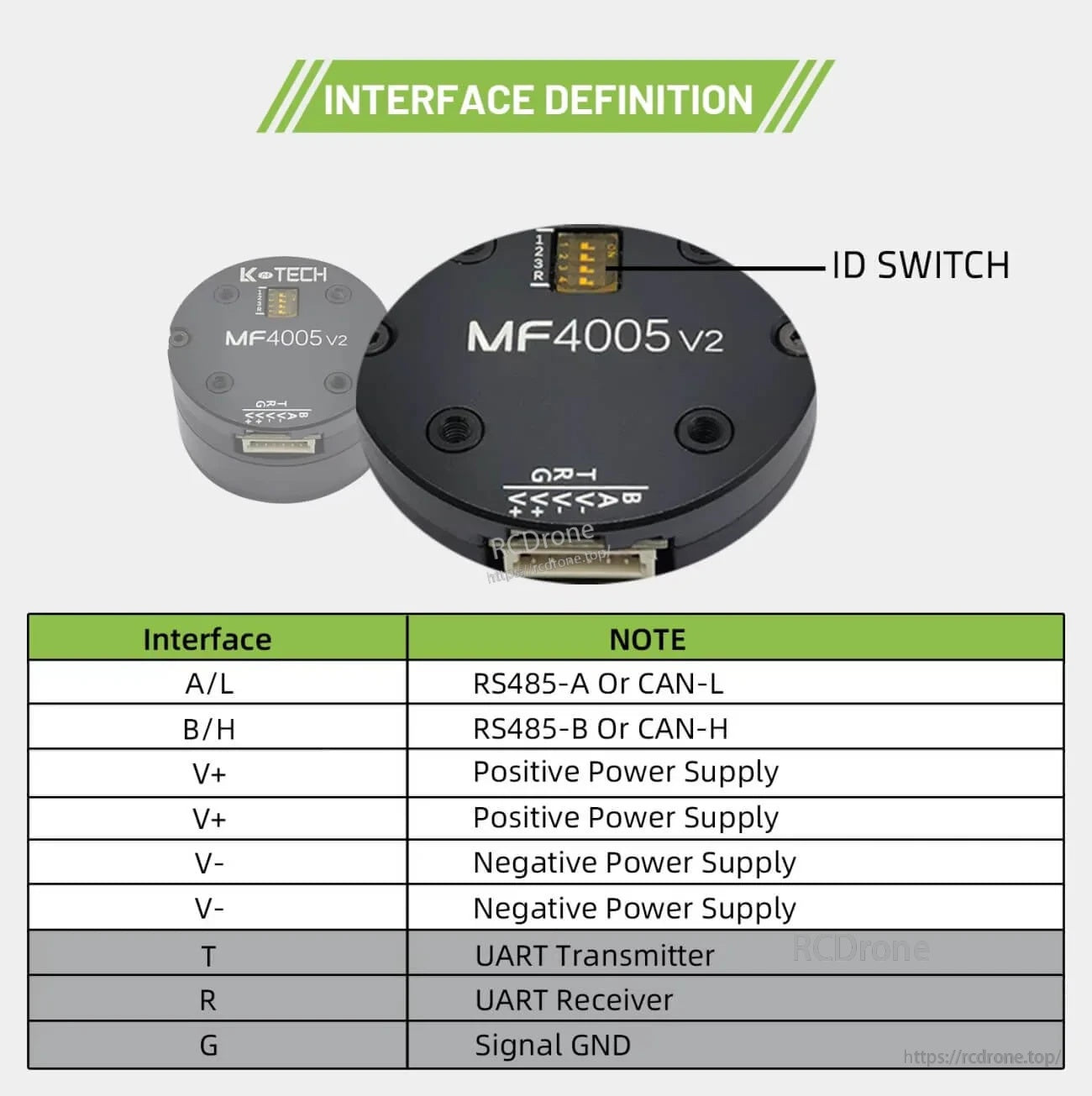
Die Verkabelung ist durch einen klar gekennzeichneten Stecker und einen ID-Schalter für Bussysteme mit RS485 oder CAN vereinfacht.
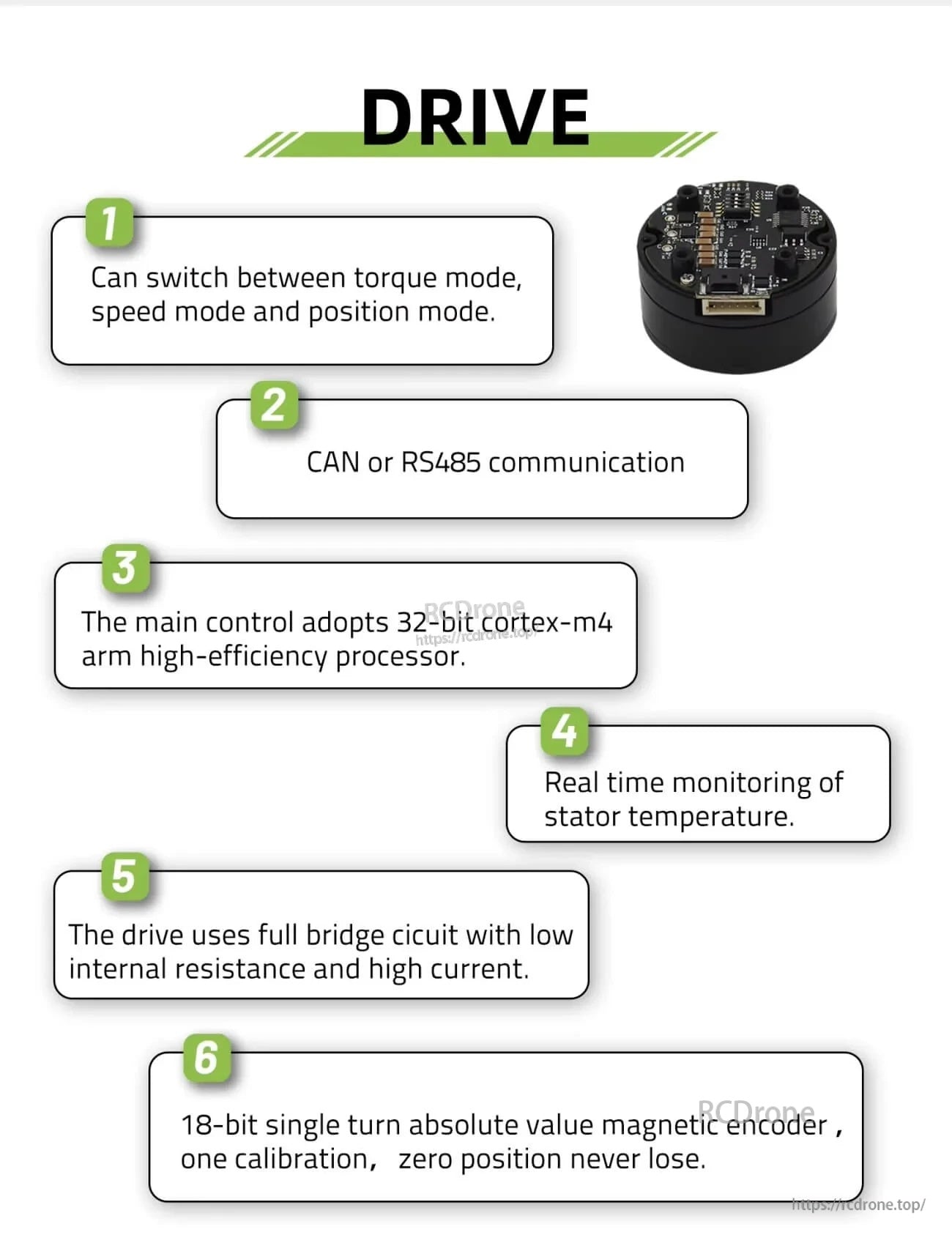
Die Antriebsfunktionen umfassen wählbare Drehmoment-, Geschwindigkeits- und Positionsmodi sowie die Überwachung der Stator-Temperatur in Echtzeit über CAN oder RS485.
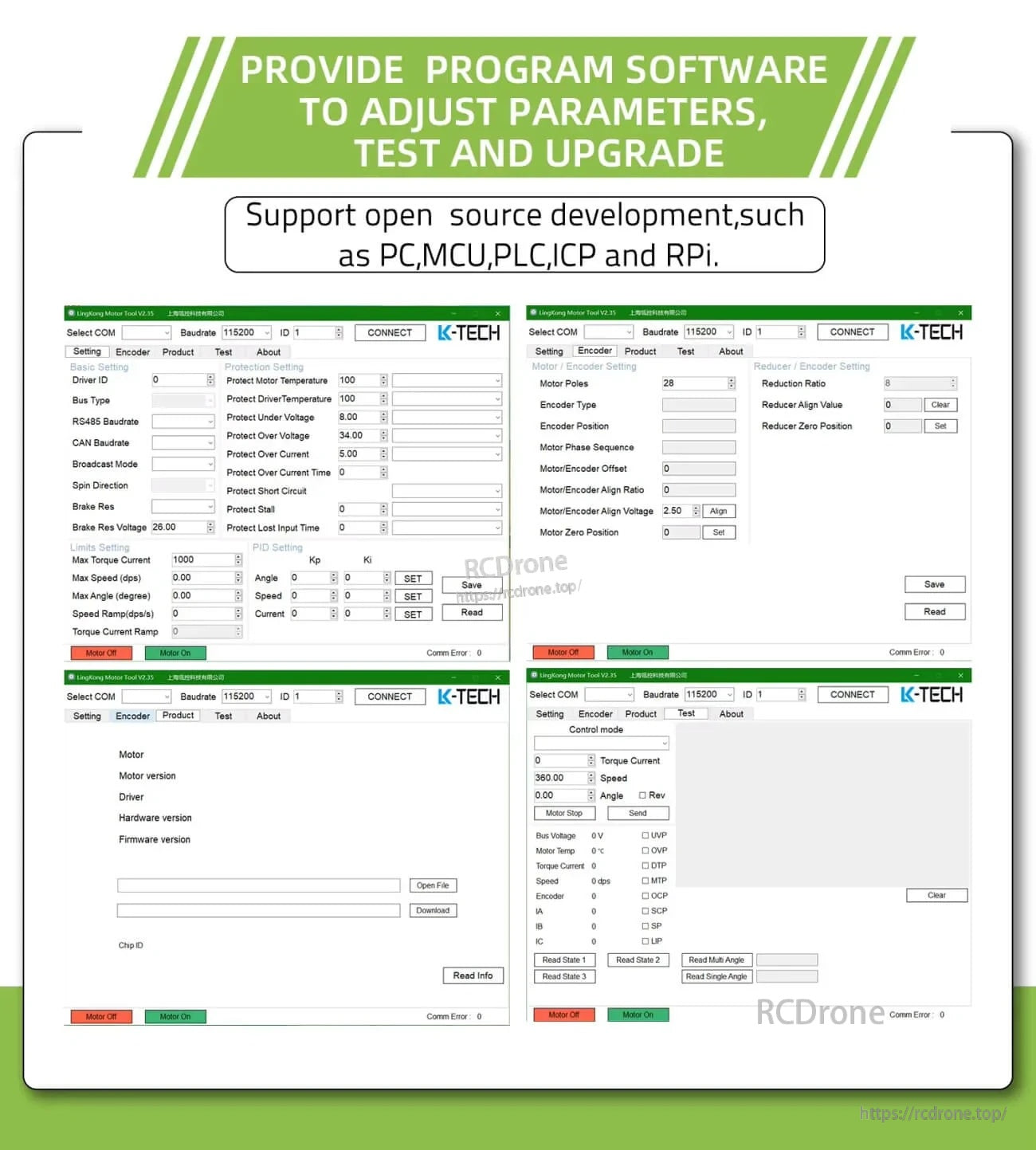
PC-Software-Support hilft bei der Parametereinstellung, Tests und Upgrades, mit Optionen, die auf Entwicklungs-Workflows zugeschnitten sind.
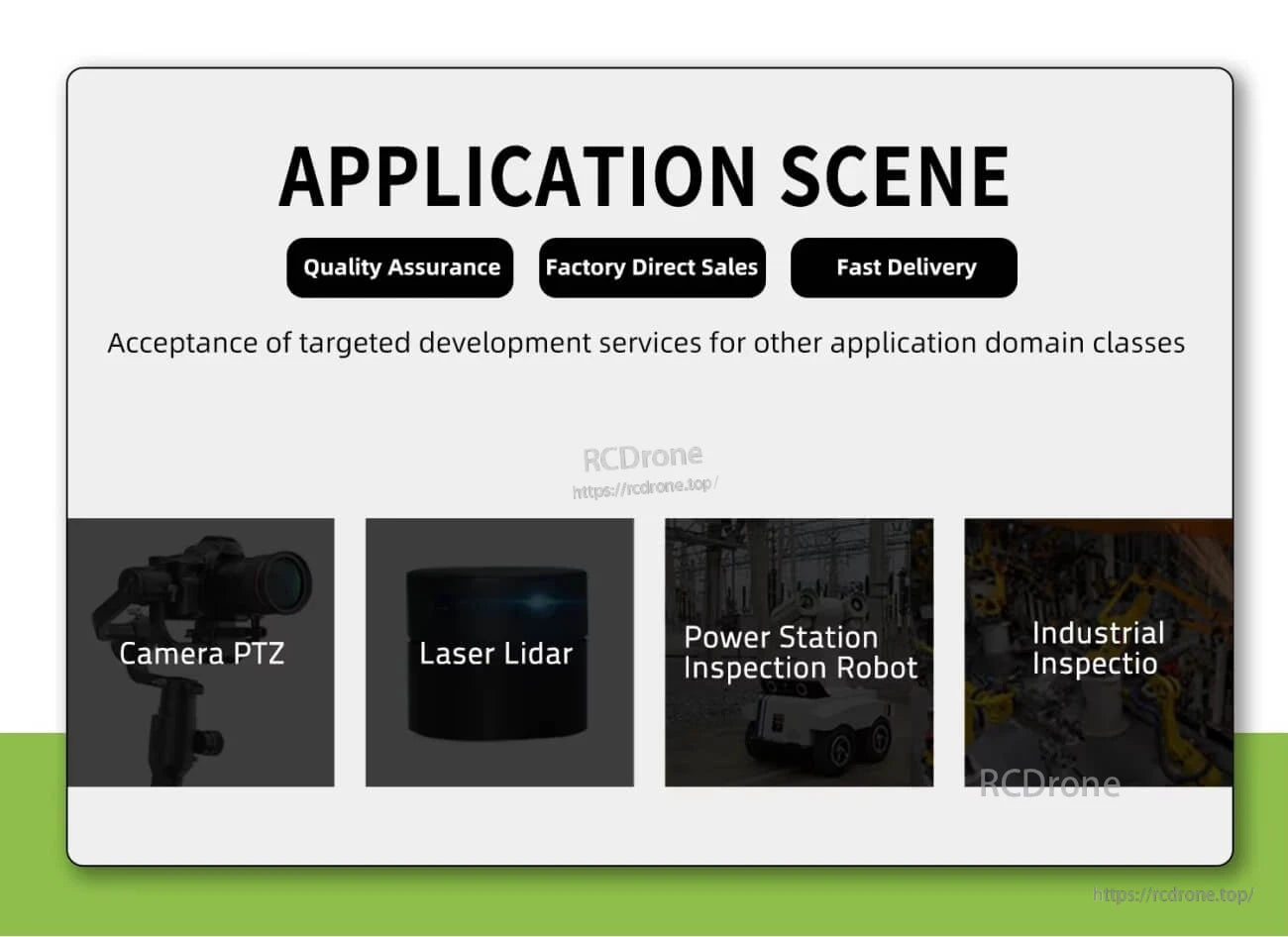
Häufige Anwendungsbereiche sind PTZ-Kamera-Head, Lidar-Systeme und Inspektionsroboter, die in industriellen Umgebungen eingesetzt werden.
Related Collections



