



LKMTECH MF6010-V2 Motor 24V MF6010v2 15/25 Umdrehungen 18bit Encoder RS485/CAN für Robotik-Aktuatoren
LKMTECH MF6010-V2 Motor 24V MF6010v2 15/25 Umdrehungen 18bit Encoder RS485/CAN für Robotik-Aktuatoren
LKMTECH
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
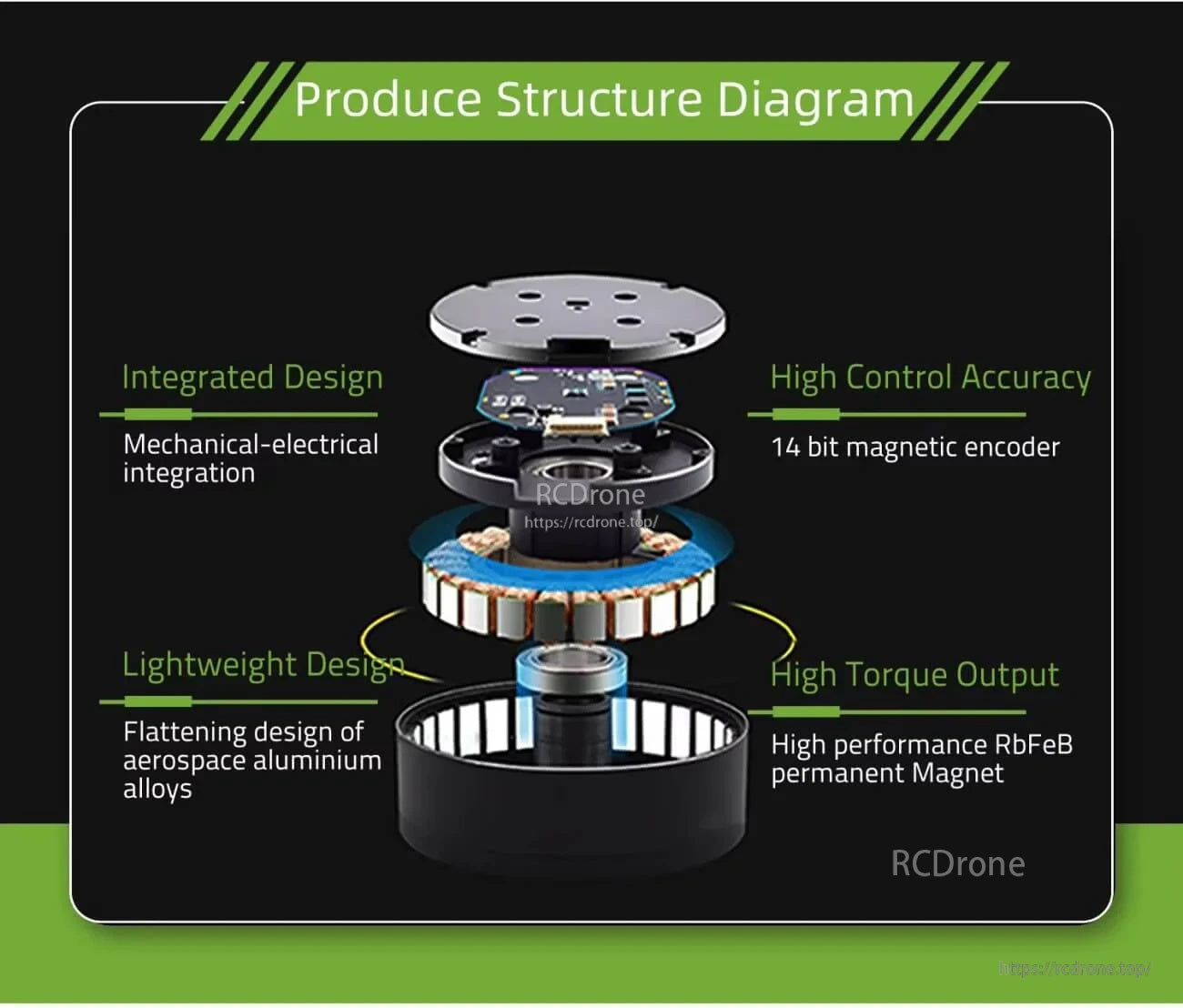
LKMTECH MF6010-V2 Motor (MF6010v2) ist ein Motor mit integriertem Design für Robotik und Automatisierungsaktoren, der sich durch eine leichte Bauweise, hohe Steuerungsgenauigkeit und hohe Drehmomentausgabe auszeichnet. Das MF v2 Produktupdate umfasst ein Upgrade der Encoderauflösung von 14 Bit auf 18 Bit, Optimierung des Ruckmoments, Unterstützung von PWM-Eingängen und CAN/RS485-Kommunikation mit mehreren Baudraten.
Hauptmerkmale
- Integriertes Design: mechanische-elektrische Integration
- Leichtbauweise: flaches Design aus Luftfahrt-Aluminiumlegierungen
- Hohe Drehmomentausgabe: Hochleistungs-RbFeB-Dauermagnet
- Hohe Steuerungsgenauigkeit: 14-Bit-Magnetencoder (MF v2 Update-Notizen Encoder-Auflösung von 14-Bit auf 18-Bit aktualisiert)
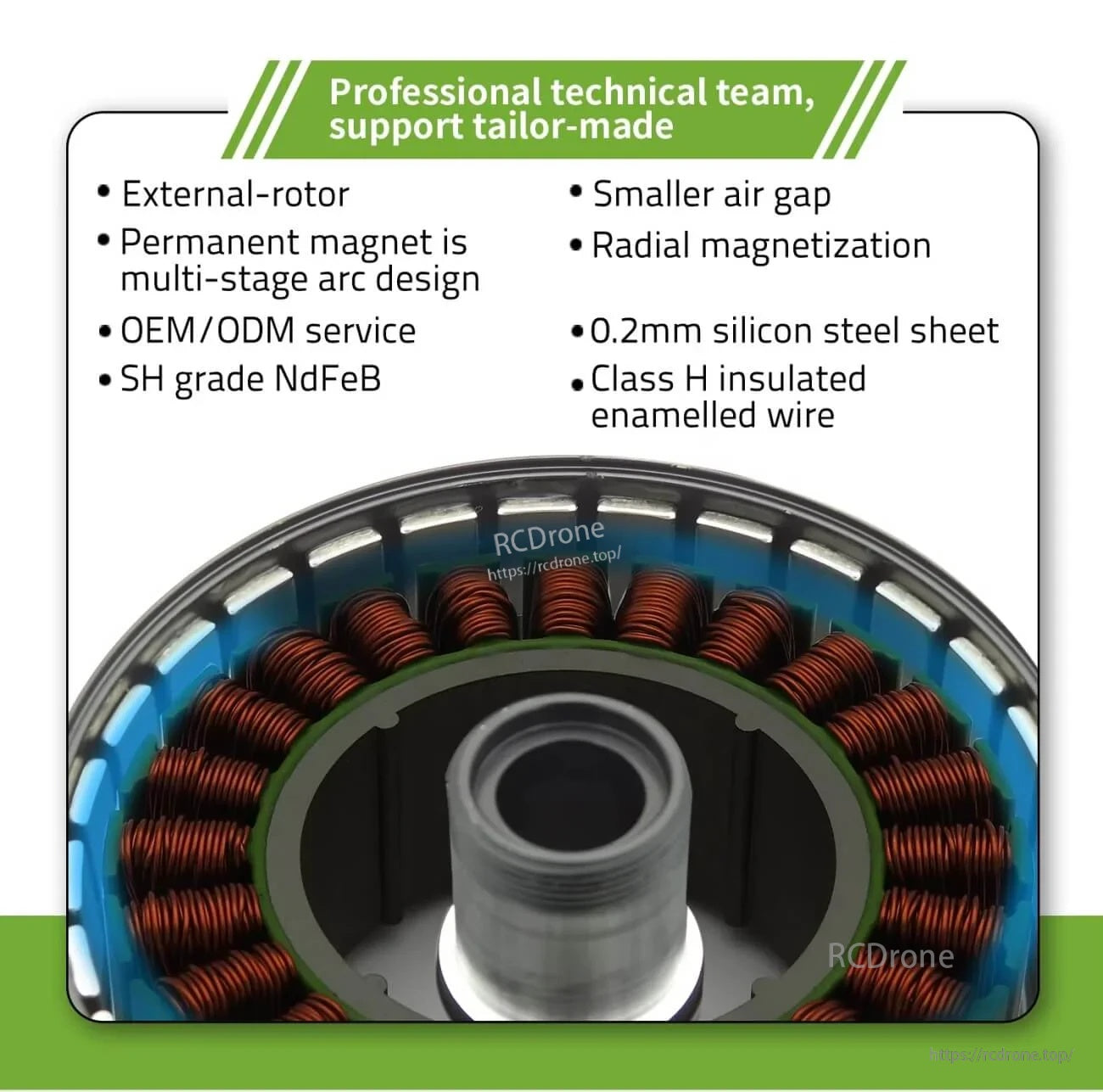
- Außenrotor-Design
- Dauermagnet-Multistufen-Bogen-Design
- SH-Qualität NdFeB
- Kleinere Luftspalte; radiale Magnetisierung
- 0.2mm Siliziumstahlblech
- Klasse H isolierter emaillierter Draht
- Unterstützt PWM-Eingang
- CAN- und RS485-Kommunikation unterstützen eine Vielzahl von Baudraten
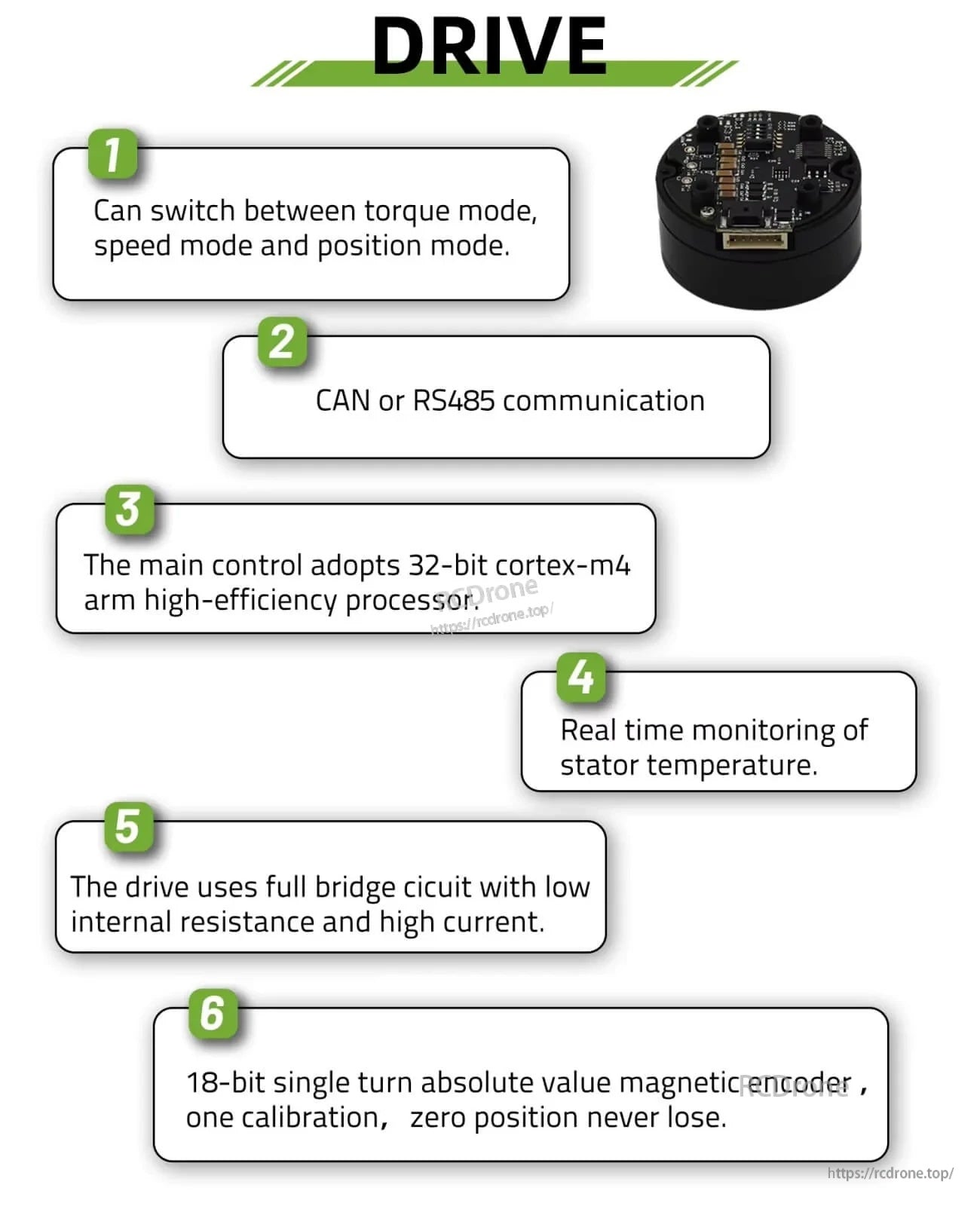
- Antriebsfunktionen (wie dargestellt): Drehmoment/Geschwindigkeit/Positionsmodus-Umschaltung; 32-Bit Cortex-M4 ARM Hochleistungsprozessor; Echtzeitüberwachung der Stator-Temperatur; Vollbrückenschaltung mit niedrigem Innenwiderstand und hohem Strom; 18-Bit Einzelumdrehungs-Absolute-Wert-Magnetencoder (eine Kalibrierung, Nullposition geht nie verloren)
- Programmiersoftware bereitgestellt, um Parameter anzupassen, Tests durchzuführen und zu aktualisieren; unterstützt Open-Source-Entwicklung wie PC, MCU, PLC, ICP und RPi
Für Integrationsfragen (Verdrahtung, Antriebswahl oder Schnittstellenkonfiguration) kontaktieren Sie [email protected] or besuchen Sie https://rcdrone.top/.
Anwendungen
- Humanoide Roboter
- Roboterarme
- Exoskelette
- Quadrupedale Roboter
- AGV-Fahrzeuge
- ARU-Roboter
- Kamera PTZ
- Laser Lidar
- Inspektionsroboter für Kraftwerke
- Industrielle Inspektion
Spezifikationen
| Parameter | Wert (15 Umdrehungen) | Wert (25 Umdrehungen) |
|---|---|---|
| Artikelname | MF6010v2 | MF6010v2 |
| Umdrehungen | 15 | 25 |
| Nennspannung | 24V | 24V |
| Maximale Geschwindigkeit | 2200RPM | 1280RPM |
| Nennmoment | 0.55N.m | 0.55N.m |
| Bewertete Geschwindigkeit | 1700U/min | 900U/min |
| Bewerteter Strom | 5.3A | 3.1A |
| Maximale Leistung | 175W | 70W |
| Maximales Drehmoment | 4N.m | 2.7N.m |
| Geschwindigkeitskonstante | 71U/min/V | 37.5U/min/V |
| Drehmomentkonstante | 0.18N.m/A | 0.10N.m/A |
| Wicklungstyp | Y | Y |
| Leitungswiderstand | 0.65Ω | 1.59Ω |
| Phaseninduktivität | 0.34mH | 0.99mH |
| Motorpolen | 28 | 28 |
| Rotormasse | 394gcm² | 394gcm² |
| Motortemperatur | JA | JA |
| Lagerrated Belastung | 280N | 280N |
| Motorgewicht | 193g | 193g |
| Empfohlener Antrieb | DF40v2 | DF40v2 |
| Antriebseingangsspannung | 7.4-32V | 7.4-32V |
| Kommunikation | RS485 ODER CAN | RS485 ODER CAN |
| Kommunikationsfrequenz | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | 18-Bit Magnet-Encoder | 18-Bit Magnet-Encoder |
| Encoder Baudrate (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| Steuermodus | Drehmomentregelung(24KHz)/Geschwindigkeitsregelung(8KHz)/Positionsregelung(8KHz) | Drehmomentregelung(24KHz)/Geschwindigkeitsregelung(8KHz)/Positionsregelung(8KHz) |
| Beschleunigungskurve | Trapezförmige Beschleunigung | Trapezbeschleunigung |
Schnittstellendefinition
- ID-SCHALTER
| Schnittstelle | Hinweis |
|---|---|
| B/L | RS485-B oder CAN-L |
| A/H | RS485-A oder CAN-H |
| V- | Negative Stromversorgung |
| V- | Negative Stromversorgung |
| V- | Negative Stromversorgung |
| V+ | Positive Stromversorgung |
| V+ | Positive Stromversorgung |
| V+ | Positive Stromversorgung |
| T | UART-Sender |
| R | UART-Empfänger |
| G | Signal GND |
Handbücher
Details

MF6010v2 ist ein kompakter integrierter Motor für Robotik-Aktoren, aktualisiert mit einem 18-Bit-Magnetencoder sowie PWM-Eingang und CAN/RS485-Steuerung.
Ein integriertes mechanisch-elektrisches Layout hält den Aktuator schlank und sorgt gleichzeitig für präzises Feedback und starke Drehmomentabgabe.
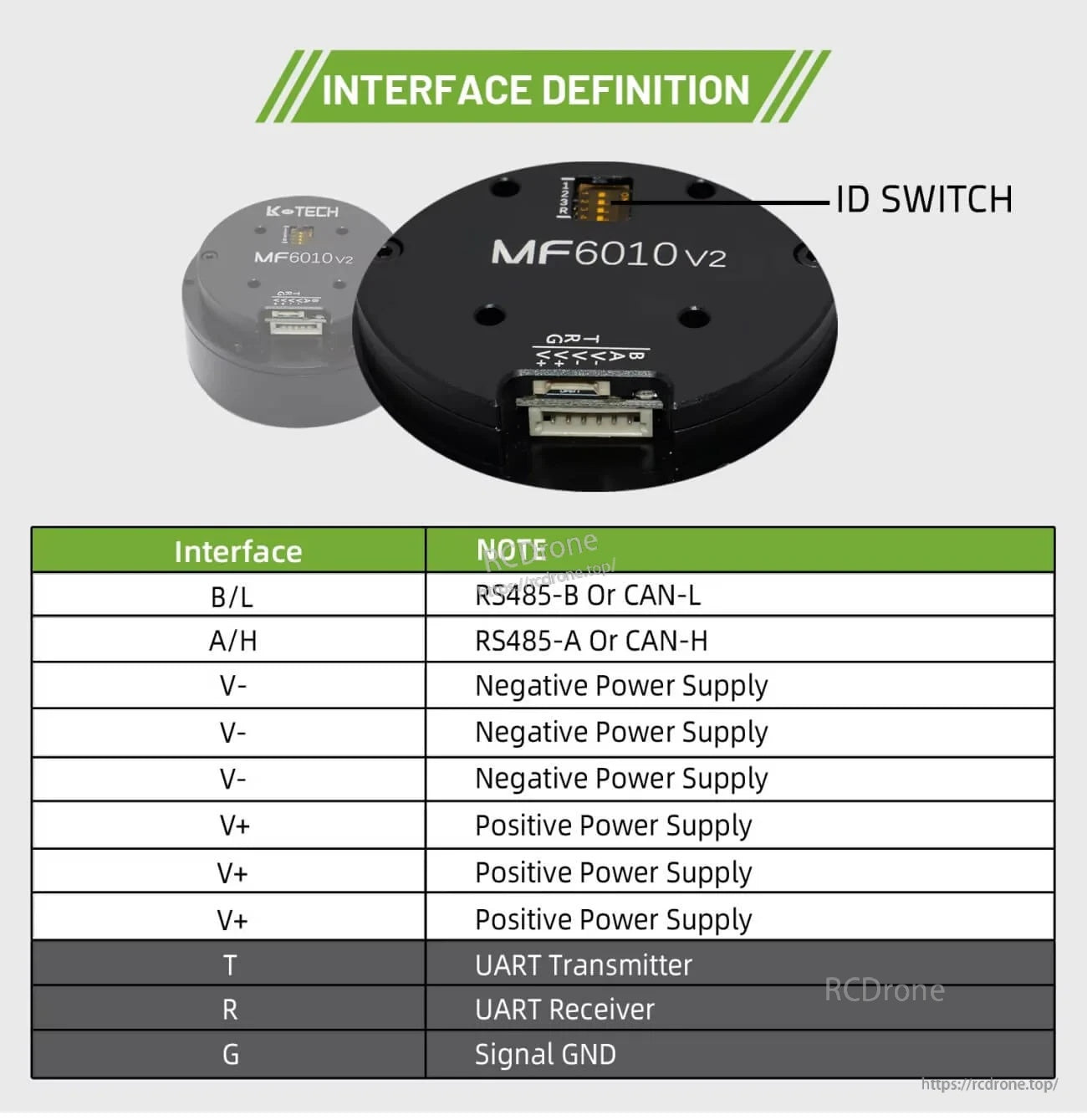
Klare Anschlussbeschriftungen und ein integrierter ID-Schalter helfen bei Multi-Motor-Bus-Setups mit RS485 oder CAN.
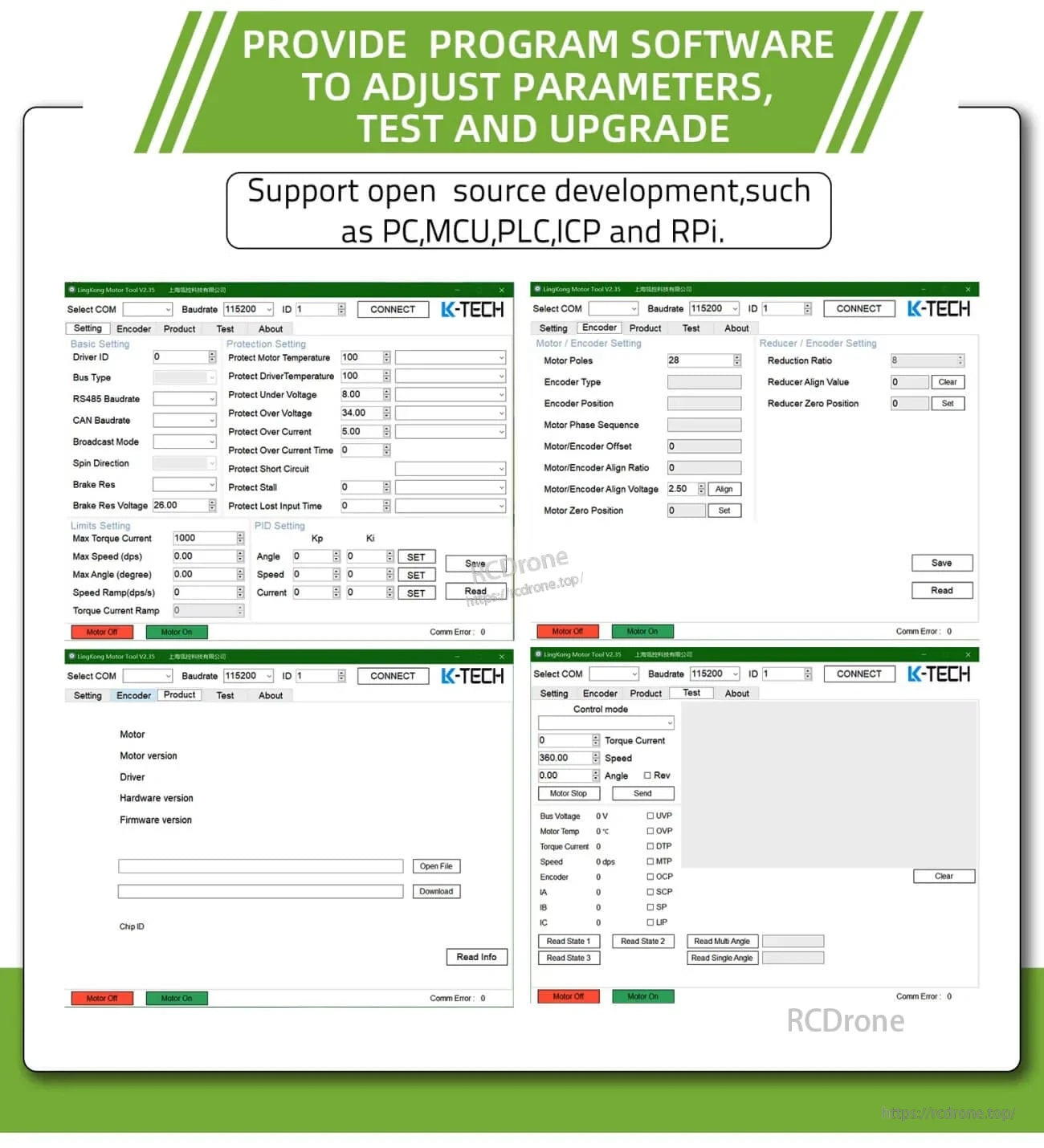
Konfigurationssoftware wird bereitgestellt für die Parametereinstellung, Tests und Upgrades während der Integration und Inbetriebnahme.

Related Collections



