



LKMTECH MF6015-V2 Motor 24V (15T/25T) 18bit Magnet-Encoder, RS485/CAN, DF40v2 Antrieb empfohlen
LKMTECH MF6015-V2 Motor 24V (15T/25T) 18bit Magnet-Encoder, RS485/CAN, DF40v2 Antrieb empfohlen
LKMTECH
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
LKMTECH MF6015-V2 Motor (MF6015v2) ist ein integriertes Motors system mit leichter Bauweise, hoher Steuerungsgenauigkeit und hohem Drehmoment. Die Updates der MF v2 umfassen Encoder-Auflösung, die von 14-Bit auf 18-Bit aktualisiert wurde, Optimierung des Ruckmoments, PWM-Eingangsunterstützung, und CAN- und RS485-Kommunikation mit mehreren Baudratenauswahlmöglichkeiten.
Hauptmerkmale
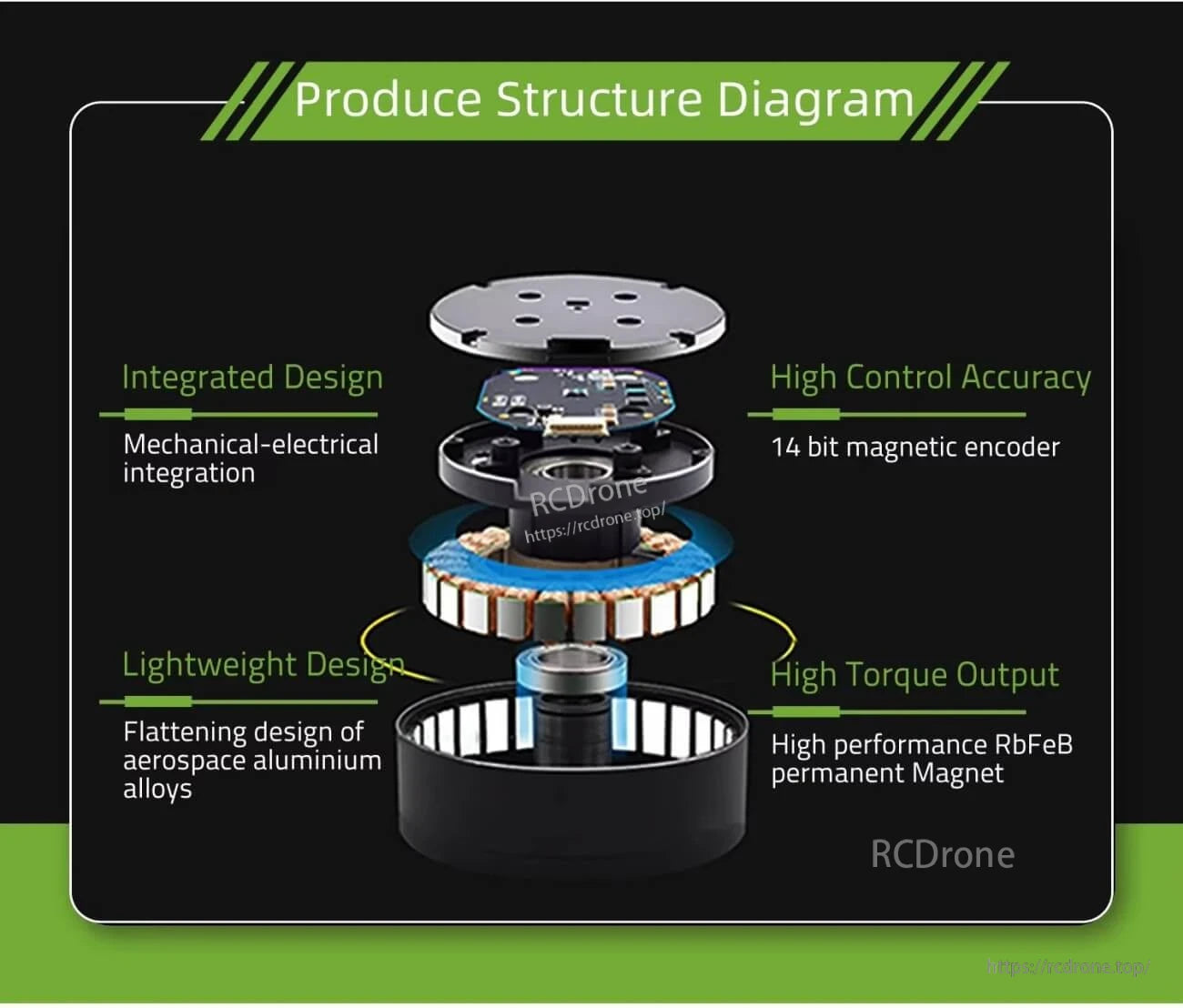
- Integriertes Design: mechanisch-elektrische Integration
- Leichtbauweise: flach gestaltete Luft- und Raumfahrt-Aluminiumlegierungen
- Hohe Drehmomentabgabe: Hochleistungs-RbFeB-Dauermagnet
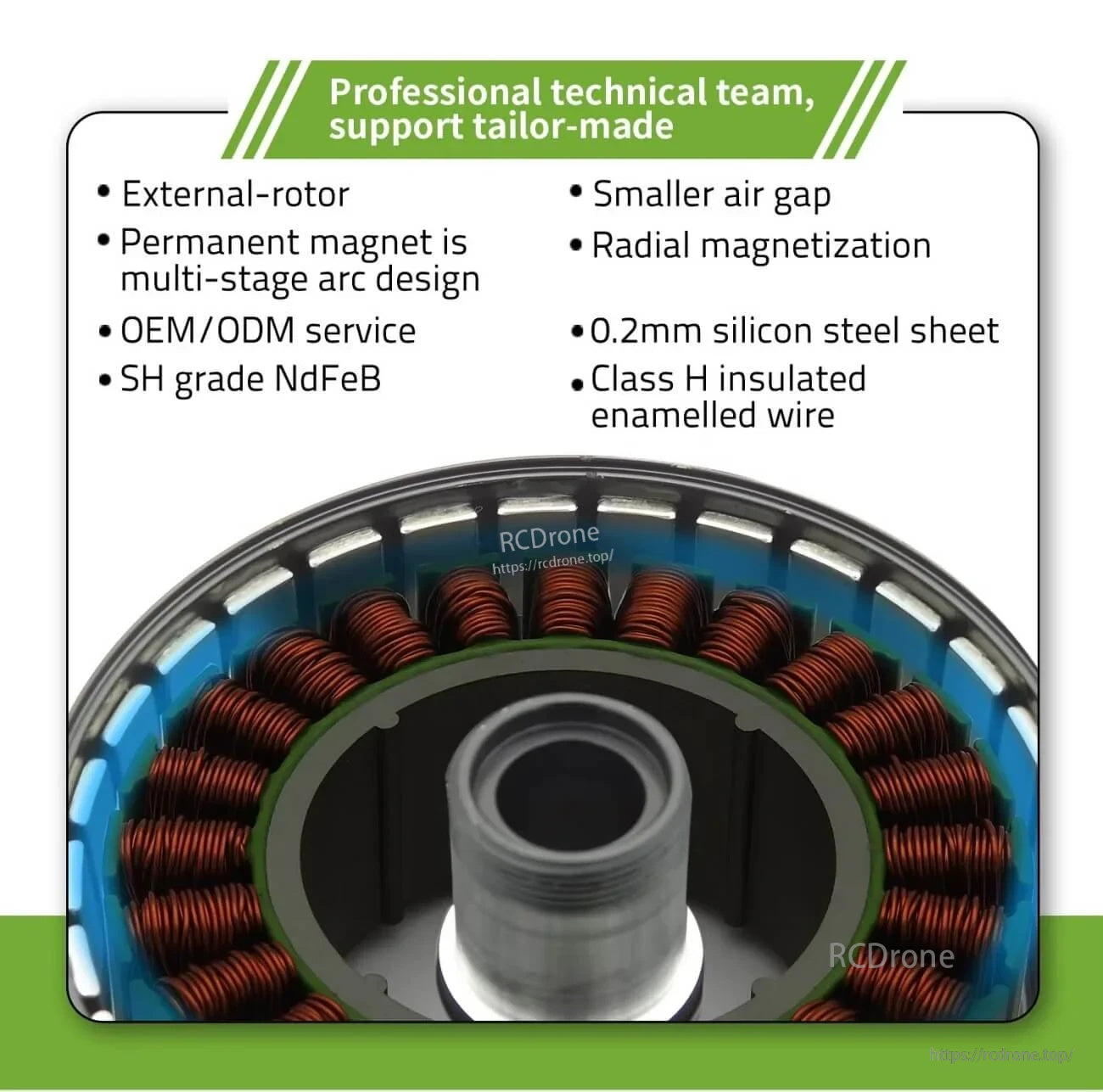
- Höhepunkte der Motorbauweise: Außenläufer; Dauermagnet-Mehrstufen-Bogen-Design; kleinerer Luftspalt; radiale Magnetisierung; 0.2mm Siliziumstahlblech; Klasse H isolierter emaillierter Draht; SH-Grad NdFeB
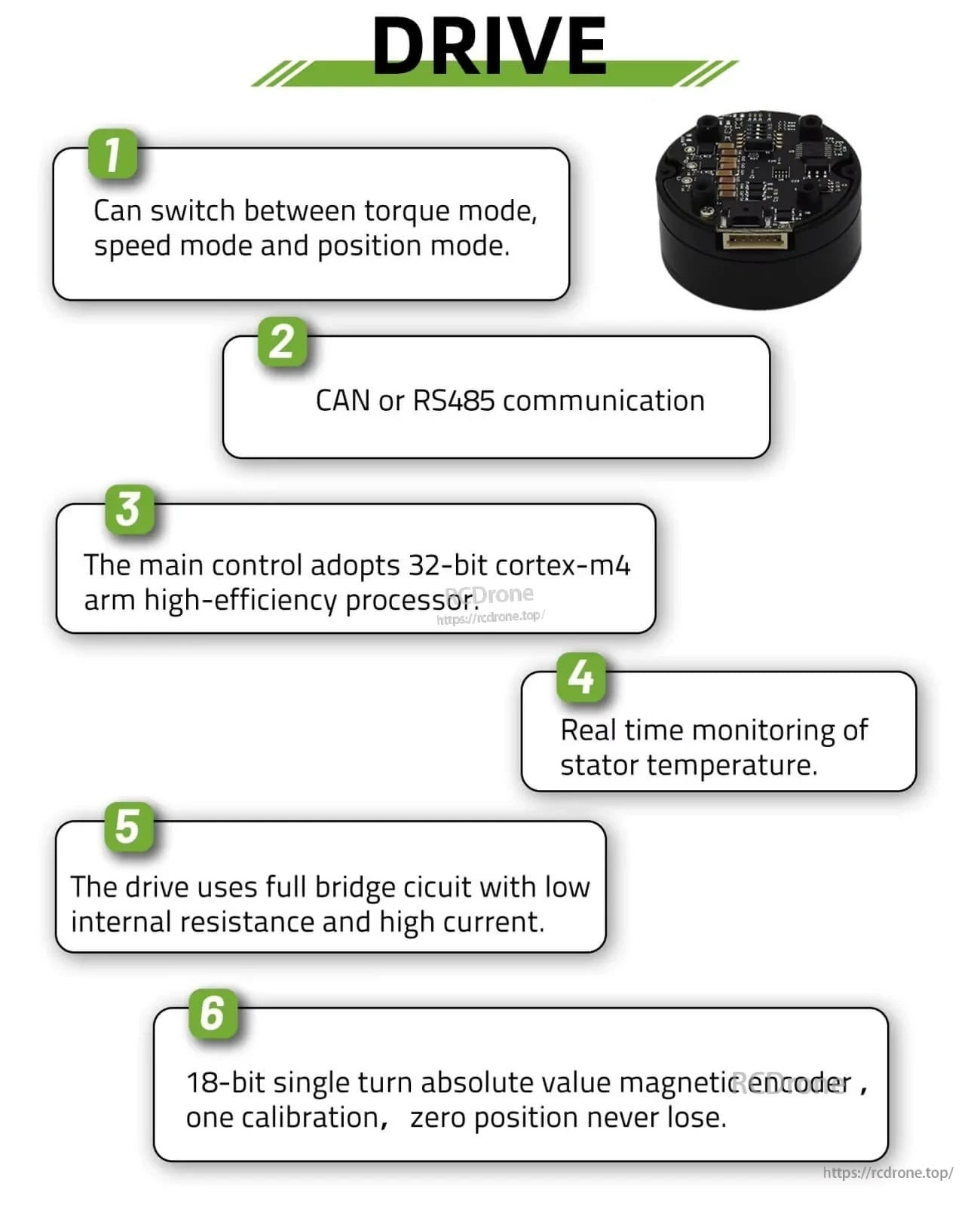
- Antriebs-/Steuerfähigkeiten: kann zwischen Drehmomentmodus, Geschwindigkeitsmodus und Positionsmodus umschalten; CAN- oder RS485-Kommunikation; Hauptsteuerung verwendet einen 32-Bit Cortex-M4 ARM Hochleistungsprozessor; Echtzeitüberwachung der Stator-Temperatur; Vollbrückenschaltung mit niedrigem Innenwiderstand und hohem Strom
- Encoder: 18-Bit Einzelumdrehungs-Absolute-Wert-Magnetencoder; eine Kalibrierung; Nullposition geht nie verloren
- Software: bietet Programmiersoftware zur Anpassung von Parametern, Testen und Upgrade; unterstützt Open-Source-Entwicklung wie PC, MCU, PLC, ICP und RPi
Für Integrationsfragen (Verdrahtung, CAN/RS485-Einrichtung oder Auswahl zwischen 15T und 25T) kontaktieren Sie den Support unter https://rcdrone.top/ oder [email protected].
Anwendungsszenarien
- Humanoide Roboter
- Roboterarme
- Exoskelette
- Quadruped-Roboter
- AGV-Fahrzeuge
- ARU-Roboter
Spezifikationen
| Parameter | Wert (15T) | Wert (25T) |
|---|---|---|
| Artikelname | MF6015v2 | MF6015v2 |
| Umdrehungen | 15 | 25 |
| Nennspannung | 24V | 24V |
| Maximale Geschwindigkeit | 1650RPM | 872RPM |
| Nennmoment | 0.81N.m | 0.82N.m |
| Nennspeed | 1260RPM | 560RPM |
| Nennstrom | 5.87A | 3.1A |
| Maximale Leistung | 185W | 57W |
| Maximales Drehmoment | 5.5N.m | 3N.m |
| Konstante Geschwindigkeit | 53rpm/V | 23.3rpm/V |
| Drehmomentkonstante | 0.14N.m/A | 0.26N.m/A |
| Wicklungstyp | Y | Y |
| Leitungswiderstand | 0.89Ω | 2.17Ω |
| Phaseninduktivität | 0.49mH | 1.44mH |
| Motorpolen | 28 | 28 |
| Rotormasse | 515gcm² | 515gcm² |
| Motortemperatur | JA | JA |
| Lagerratedlast | 280N | 280N |
| Motorgewicht | 251g | 251g |
| Empfohlener Antrieb | DF40v2 | DF40v2 |
| Antriebseingangsspannung | 7.4-32V | 7.4-32V |
| Kommunikation | RS485 ODER CAN | RS485 ODER CAN |
| Kommunikationsfrequenz | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | 18-Bit Magnet-Encoder | 18-Bit Magnet-Encoder |
| Encoder Baudrate (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| Steuermodus | Drehmomentregelung(24KHz)/Geschwindigkeitsregelung(8KHz)/Positionsregelung(8KHz) | Drehmomentregelung(24KHz)/Geschwindigkeitsregelung(8KHz)/Positionsregelung(8KHz) |
| Beschleunigungskurve | Trapezförmige Beschleunigung | Trapezbeschleunigung |
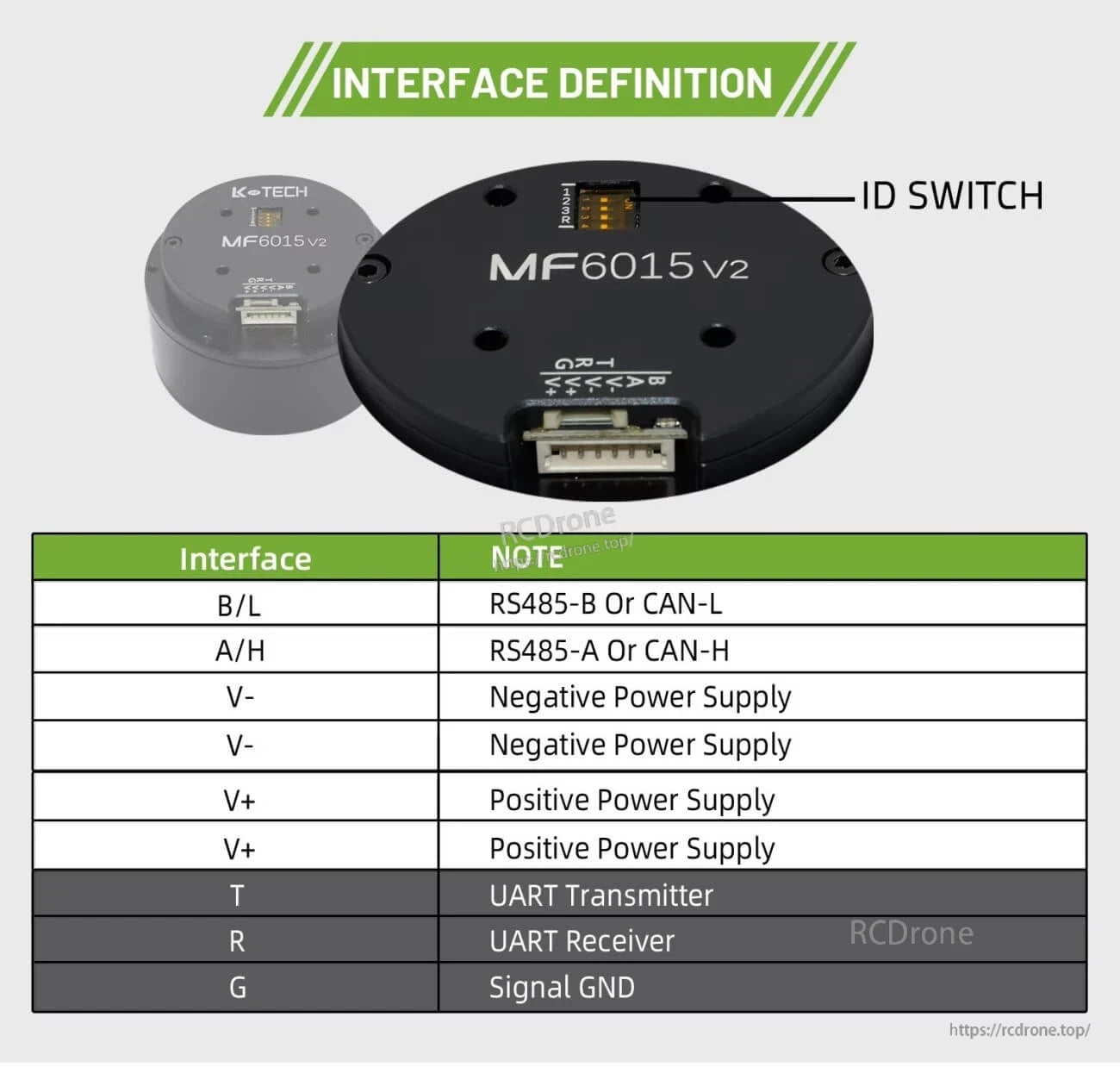
Schnittstellendefinition
| Schnittstelle | Hinweis |
|---|---|
| B/L | RS485-B oder CAN-L |
| A/H | RS485-A oder CAN-H |
| V- | Negative Stromversorgung |
| V- | Negative Stromversorgung |
| V+ | Positive Stromversorgung |
| V+ | Positive Stromversorgung |
| T | UART-Transmitter |
| R | UART-Empfänger |
| G | Signal GND |
ID-SCHALTER ist auf dem Gerät vorhanden.
Handbücher / Dokumente
Details

MF6015-V2 integriert den Motor, den Antrieb und den 18-Bit-Magnetencoder für kompakte 24V-Robotergelenke mit CAN- oder RS485-Steuerung.
Ein integriertes mechanisch-elektrisches Layout hält die Baugruppe flach und leicht, während es ein hohes Drehmoment liefert.
Die Konstruktion mit externem Rotor und kleinem Luftspalt ist darauf ausgelegt, die Drehmomentdichte und die gleichmäßige Rotation zu verbessern.
Die Pinbelegung des Steckers und der integrierte ID-Schalter erleichtern die Verkabelung und Adressierung von Multi-Node-CAN/RS485.
Drehmoment-, Geschwindigkeits- und Positionsregelungsmodi werden unterstützt, mit Echtzeit-Überwachung der Stator-Temperatur über CAN oder RS485.
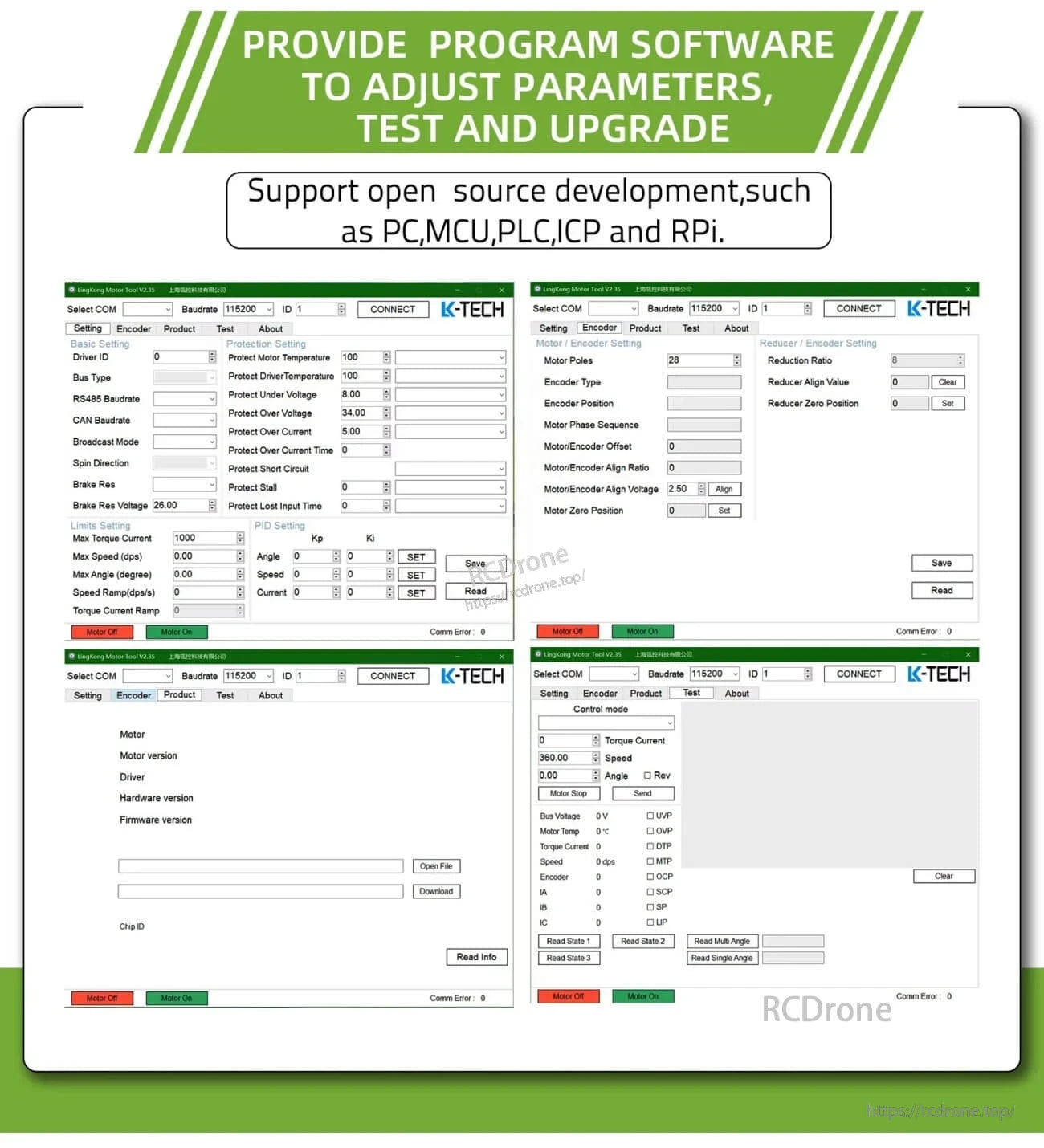
PC-Software wird für die Parameteranpassung, Tests und Firmware-Updates bereitgestellt, mit Optionen für Baudrate und Steuereinstellungen.

Related Collections



