




LKMTECH MG4005-V2 bürstenloser Motor mit 1:10 PG4210 Untersetzung, RS485/CAN, 18-Bit-Encoder
LKMTECH MG4005-V2 bürstenloser Motor mit 1:10 PG4210 Untersetzung, RS485/CAN, 18-Bit-Encoder
LKMTECH
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Der LKMTECH MG4005-V2 Motor ist ein bürstenloses Motor-Modul, das für die Aktuation in der Robotik entwickelt wurde. Es integriert einen PG4210 Planetengetriebe (1:10) und einen 18-Bit magnetischen Encoder, mit Kommunikation über RS485 oder CAN für geschlossene Regelung von Drehmoment/Geschwindigkeit/Position.
Hauptmerkmale
- Hochleistungsbürstenloser Motor
- Hochpräzises Planetengetriebe: Spiel ≤10 Bogenminuten, Übersetzung 1:10
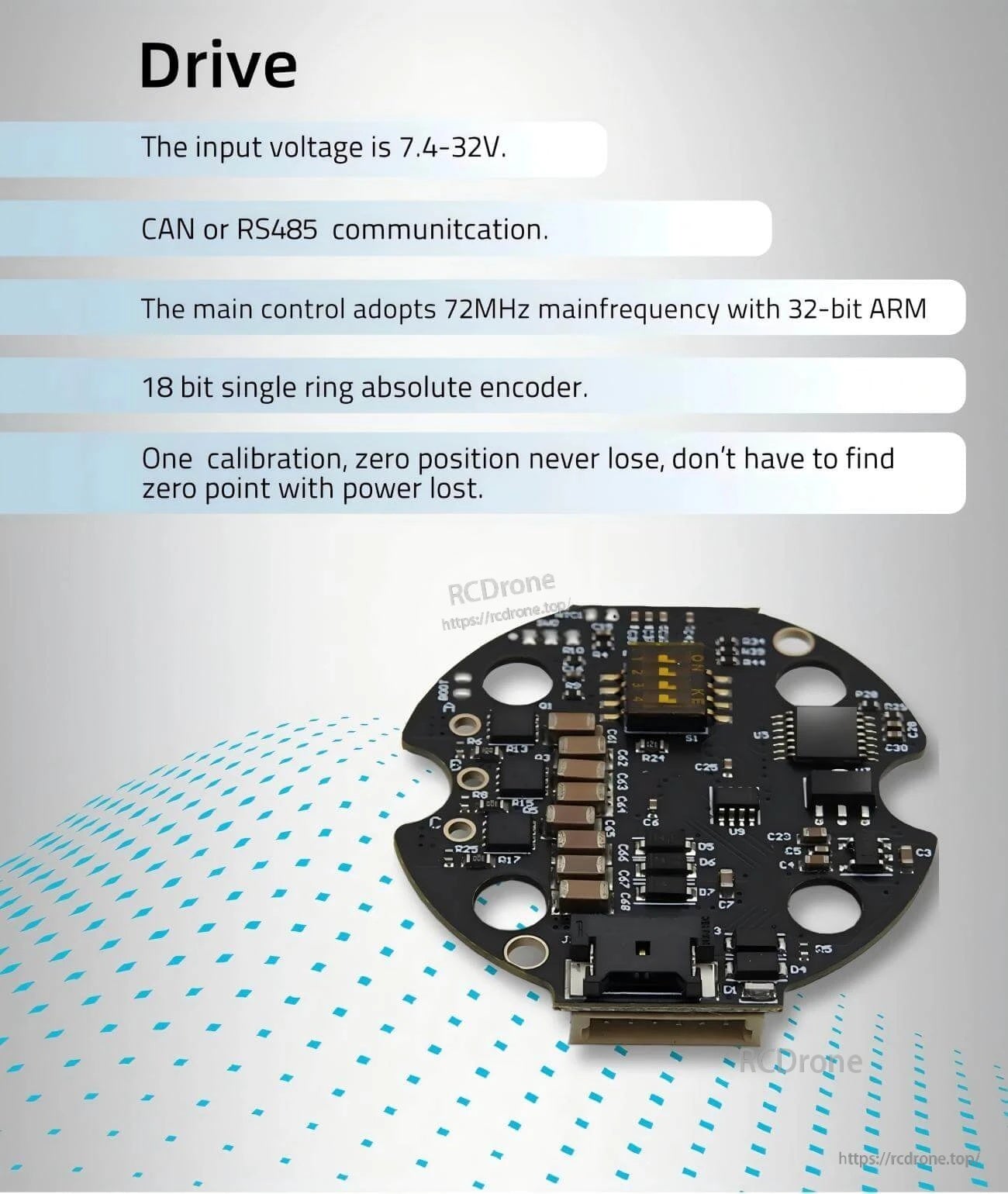
- 18-Bit Einzelring-Absolute-Encoder; eine Kalibrierung, Nullposition bleibt nach Stromausfall erhalten
- Kommunikation: CAN oder RS485
- Stromversorgungseingangsspannung: 7.4-32V
- Hauptsteuerung: 72MHz Hauptfrequenz mit 32-Bit ARM
- Unterstützt PWM-Eingang; optimiertes Motorruckmoment für einen reibungsloseren Betrieb
- Motorwerkzeug-Softwareunterstützung: Parameteranpassung, Tests und Firmware-Upgrade
- Unterstützt Open-Source-Entwicklungsplattformen wie PC, MCU, PLC, ICP und RPi
Technische Daten
| Artikelname | MG4005-V2 |
| Nennspannung | 24V |
| Maximale Geschwindigkeit | 320RPM |
| Nennspeed | 255RPM |
| Nennmoment | 1N.m |
| Maximales Moment | 2.5N.m |
| Nennstrom | 1.8A |
| Maximale Leistung | 65W |
| Geschwindigkeitskonstante | 106.3rpm/V |
| Momentenkonstante | 0.06N.m/A |
| Umdrehungen | 28 |
| Wicklungstyp | Y |
| Phasenwiderstand | 1.4Ω |
| Phaseninduktivität | 0.5mH |
| Motorpole | 28 |
| Rotorträgheit | 140gcm² |
| Motortemperatur | JA |
| Reduzierertyp | PG4210 |
| Übersetzungsverhältnis | 1:10 |
| Spiel | ≤10 Bogenminuten |
| Lagerrated Belastung | 1000N |
| Motorgewicht | 154g |
| Empfohlener Antrieb | DF40 |
| Antriebseingangsspannung | 7.4-32V |
| Kommunikation | RS485 ODER CAN |
| Kommunikationsfrequenz | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | 18-Bit Magnet-Encoder |
| Encoder Baudrate (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate (CAN) | 1M |
| Steuermodus | Drehmomentregelung (24KHz)/Geschwindigkeitsregelung (8KHz)/Positionsregelung (4KHz) |
| Beschleunigungskurve | Trapezförmige Beschleunigung |
Schnittstellendefinition
| Schnittstelle | Hinweis |
|---|---|
| A/L | RS485-A oder CAN-L |
| B/H | RS485-B oder CAN-H |
| V- | Negative Stromversorgung |
| V- | Negative Stromversorgung |
| V+ | Positive Stromversorgung |
| V+ | Positive Stromversorgung |
| T | UART-Sender |
| R | UART-Empfänger |
| G | Signal GND |
Anwendungen
- Humanoide Roboter
- Robotergelenke
- Exoskelette / tragbare Roboter
- Quadruped-Roboter / Roboterhund
- AGV-Fahrzeuge / AGV-Auto
- ARU-Roboter
Handbücher
Für Verkabelung, Integration und After-Sales-Support kontaktieren Sie https://rcdrone.top/ oder senden Sie eine E-Mail an [email protected] .
Details

Der MG4005‑V2, der für die Robotik-Aktuation entwickelt wurde, kombiniert einen kompakten bürstenlosen Motor und ein Getriebe in einem einfach zu integrierenden Modul.
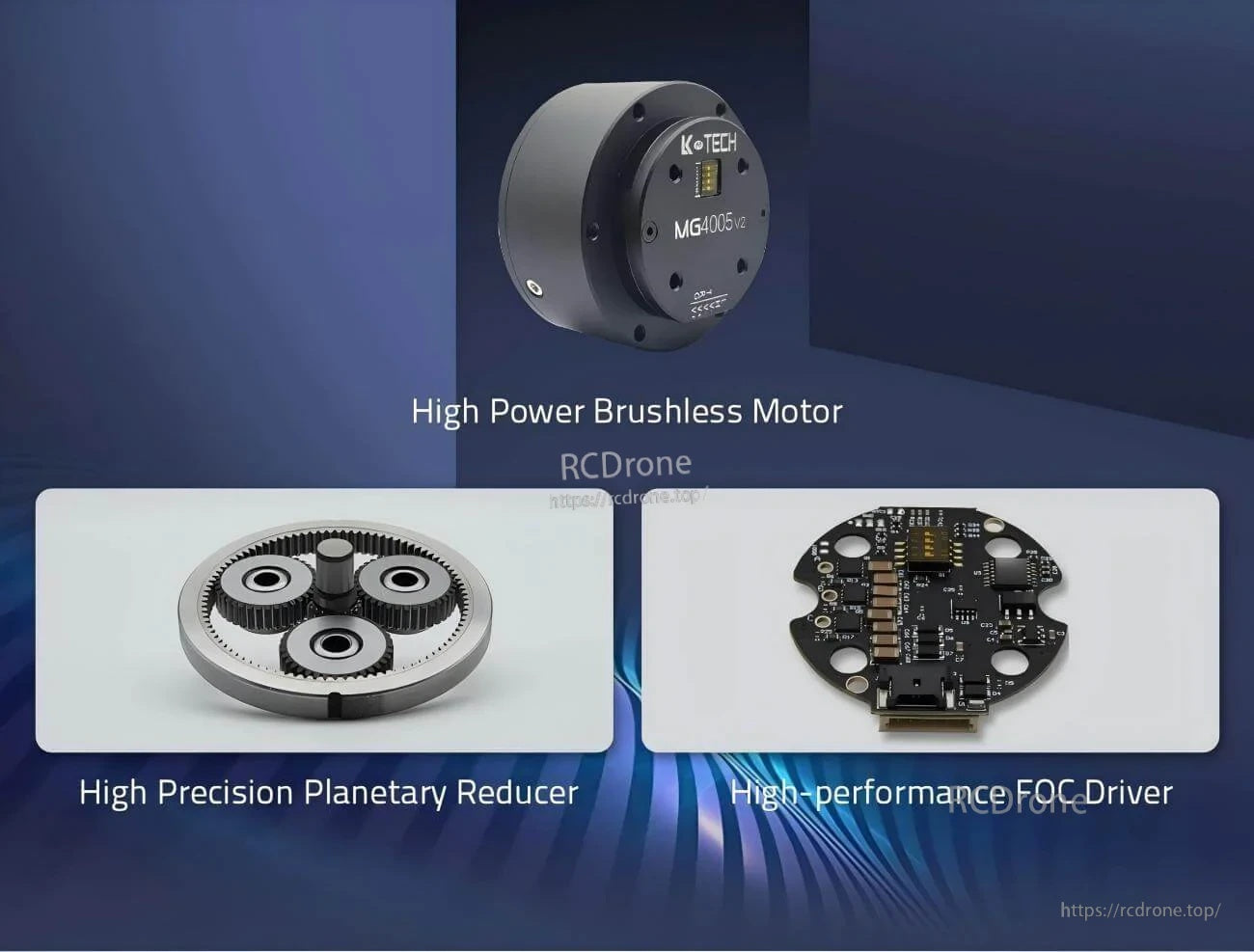
Ein abgestimmter Motor, ein Planetengetriebe und eine Treiberplatine helfen, die geschlossene Regelung von Drehmoment, Geschwindigkeit und Position zu vereinfachen.
CAN- oder RS485-Kommunikation und ein breiter Eingangsbereich von 7,4–32V erleichtern die Integration in gängige Robotik-Controller.

Der Versionsvergleich hebt das Upgrade des MG4005‑V2 auf 18-Bit-absolute Rückmeldung und PWM-Eingangsunterstützung hervor.
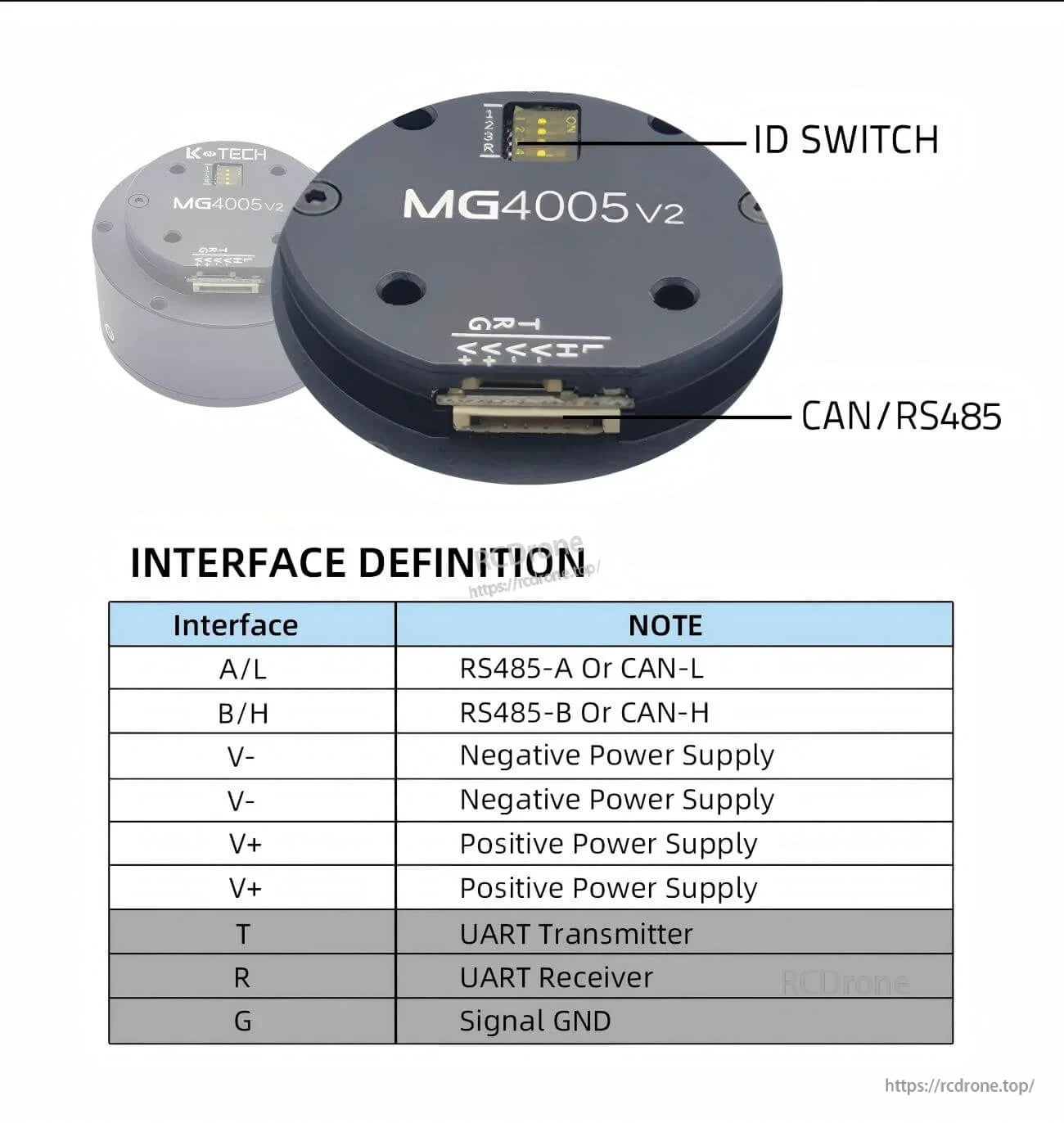
Pin-Definitionen und der integrierte ID-Schalter helfen, die Verkabelung und Buskonfiguration für mehrere Achsen zu optimieren.

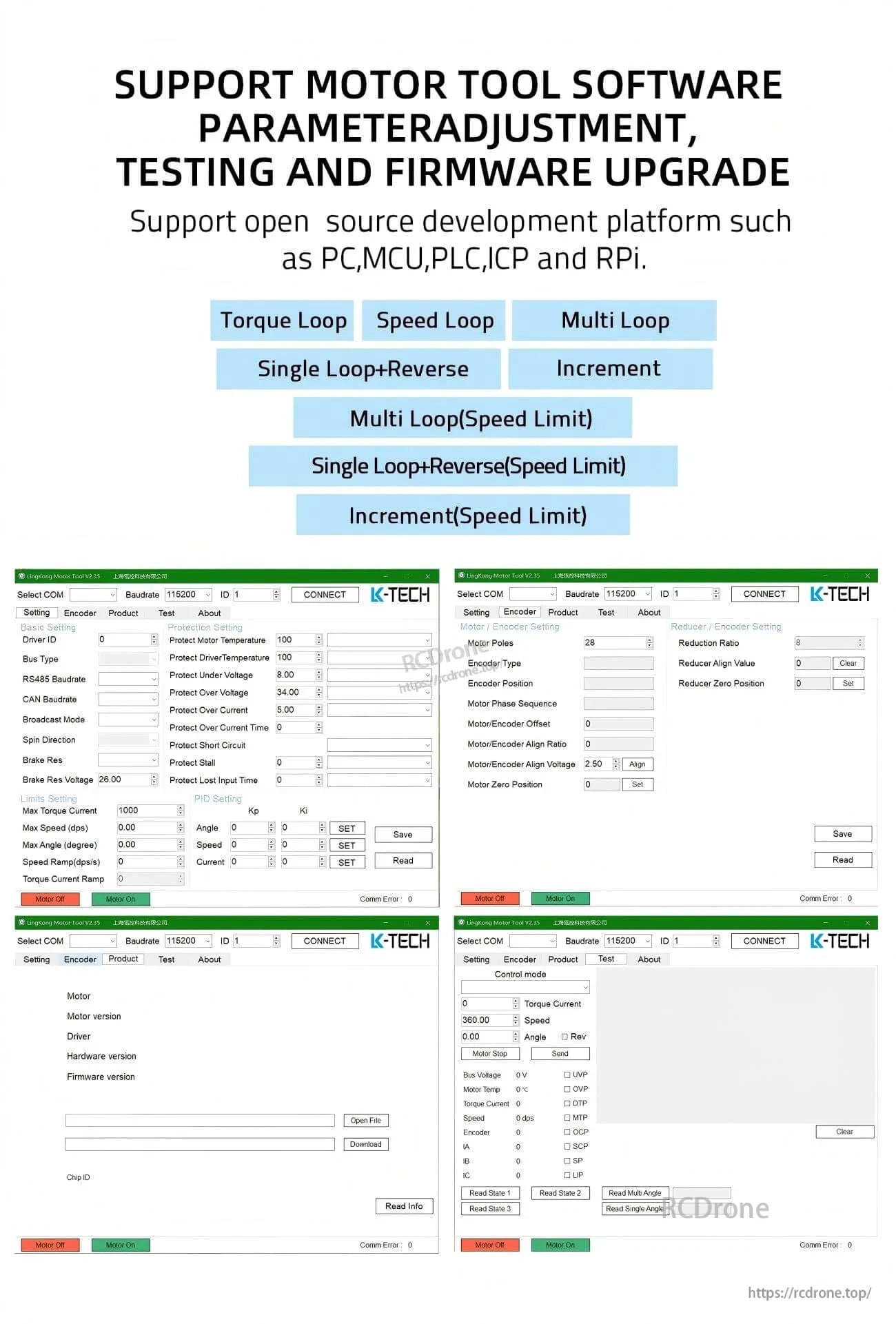
Die Motor-Tool-Software unterstützt die Parametrierung, Tests und Firmware-Updates während der Einrichtung und Wartung.

Related Collections




