




LKMTECH MG4005E-i10-V3 Planetengetriebemotor, 24V 1:10 PG4210, RS485/CAN Doppel-Encoder
LKMTECH MG4005E-i10-V3 Planetengetriebemotor, 24V 1:10 PG4210, RS485/CAN Doppel-Encoder
LKMTECH
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Der LKMTECH MG4005E-i10-V3 Motor ist ein planetarischer Getriebemotor , der für robotische Bewegungen und Automatisierungsjointes entwickelt wurde, die kompakte Getriebe, geschlossene Regelkreise und Buskommunikation erfordern. Er integriert einen planetarischen Getriebe-Reduzierer (PG4210, 1:10) und duale absolute magnetische Encoder (Motorseite + Reduziererseite) für präzise Steuerung.
Hauptmerkmale
- Planetengetriebemotor: hohe Leistung, hohes Drehmoment und hohe Präzision
- Bürstenloser Motor + hochpräziser Planetengetriebe-Reduzierer
- FOC-Steuerung (Antrieb/Treiber erforderlich)
- Duale Encoder: 18-Bit-Einzelumdrehungs-absolute Magnetencoder (Motorseite) + 14-Bit-Einzelumdrehungs-absolute Magnetencoder (Reduziererseite)
- Der Encoder auf der Reduziererseite unterstützt die Ausgabe des absoluten Wertes einer Umdrehung und merkt sich den Nullpunkt nach dem Ausschalten
- RS485 oder CAN-Bus-Kommunikation
- Unterstützt die Parameteranpassung über PC-Software, Tests und Firmware-Upgrade
- Unterstützt Open-Source-Entwicklungsplattformen: PC, MCU, PLC, Industriecomputer und Raspberry Pi
- Mehrere unterstützte Steuerungsmodi: Drehmomentmodus, Geschwindigkeitsmodus, Mehrdrehungssteuerungsmodus, Einzeldrehungspositions- + Richtungsmodus, Inkrementeller Positionsmodus, Mehrdrehungssteuerungsmodus (mit Geschwindigkeitsbegrenzung), Einzeldrehungspositions- + Richtungsmodus (mit Geschwindigkeitsbegrenzung), Inkrementeller Positionsmodus (mit Geschwindigkeitsbegrenzung)
- Duale Temperatursensor-Schnittstellen überwachen die Temperaturen von Motor und Antrieb in Echtzeit
- Reservierte Bremsfunktion (Bremse / Bremsfreigabe)
- Aufgelistete Mehrfachschutzfunktionen: UVP, OVP, DTP, MTP, OCP, SCP, MSP, LIP
Für Integrationsunterstützung und Vorverkaufsbestätigung kontaktieren Sie https://rcdrone.top/ oder senden Sie eine E-Mail an [email protected].
Technische Daten
| Artikelname | MG4005E-i10-V3 |
| Nennspannung | 24V |
| Maximale Geschwindigkeit | 320RPM |
| Nennmoment | 1 N.m |
| Nennspeed | 255RPM |
| Nennstrom | 1.8A |
| Maximale Leistung | 65W |
| Maximales Drehmoment | 2.5 N.m |
| Geschwindigkeitskonstante | 106.3rpm/V |
| Drehmomentkonstante | 0.06 N.m/A |
| Umdrehungen | 28 |
| Wicklungstyp | Y |
| Phasenwiderstand | 1.4Ω |
| Phaseninduktivität | 0.5mH |
| Motorpolen | 28 |
| Rotormasse | 140gcm² |
| Motortemperatur | JA |
| Reduzierertyp | PG4210 |
| Übersetzungsverhältnis | 1:10 |
| Spiel | ≤10 Bogenminuten |
| Lagerrated Belastung | 1000N |
| Motorgewicht | 183g |
| Empfohlener Antrieb | DG40E |
| Antriebseingangsspannung | 7.4-32V |
| Kommunikation | RS485 oder CAN |
| Kommunikationsfrequenz | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) |
| Encoder | 18-Bit (Motor) + 14-Bit (Getriebe) magnetischer Encoder |
| Encoder Baudrate (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate (CAN) | 100K, 125K, 250K, 500K, 1M |
| Steuermodus | Drehmomentregelung (24KHz) / Geschwindigkeitsregelung (8KHz) / Positionsregelung (4KHz) |
| Beschleunigungskurve | Trapezförmige Beschleunigung |
Schnittstellendefinition
| Schnittstelle | Hinweis |
|---|---|
| A/H | RS485-A oder CAN-H |
| B/L | RS485-B oder CAN-L |
| V- | Negative Stromversorgung |
| V+ | Positive Stromversorgung |
| A/H | RS485-A oder CAN-H |
| B/L | RS485-B oder CAN-L |
| T | UART-Sender |
| R | UART-Empfänger |
| G | Signal GND |
Anwendungen
- Humanoide Roboter
- Roboterarme
- Exoskelette / tragbare Roboter
- Quadrupedale Roboter / Roboterhund
- AGV-Fahrzeuge / AGV-Auto
- ARU-Roboter
Handbücher / Dateien
Details

MG4005E-i10-V3 kombiniert einen bürstenlosen Motor mit einem Planetengetriebe in kompakter Form für robotische Gelenke und Automatisierungsachsen.

Duale Einzelumdrehungs-absolute magnetische Encoder bieten Feedback auf der Motor- und Ausgangsseite, mit einem speziellen ID-Schalter für Bus-Setups.
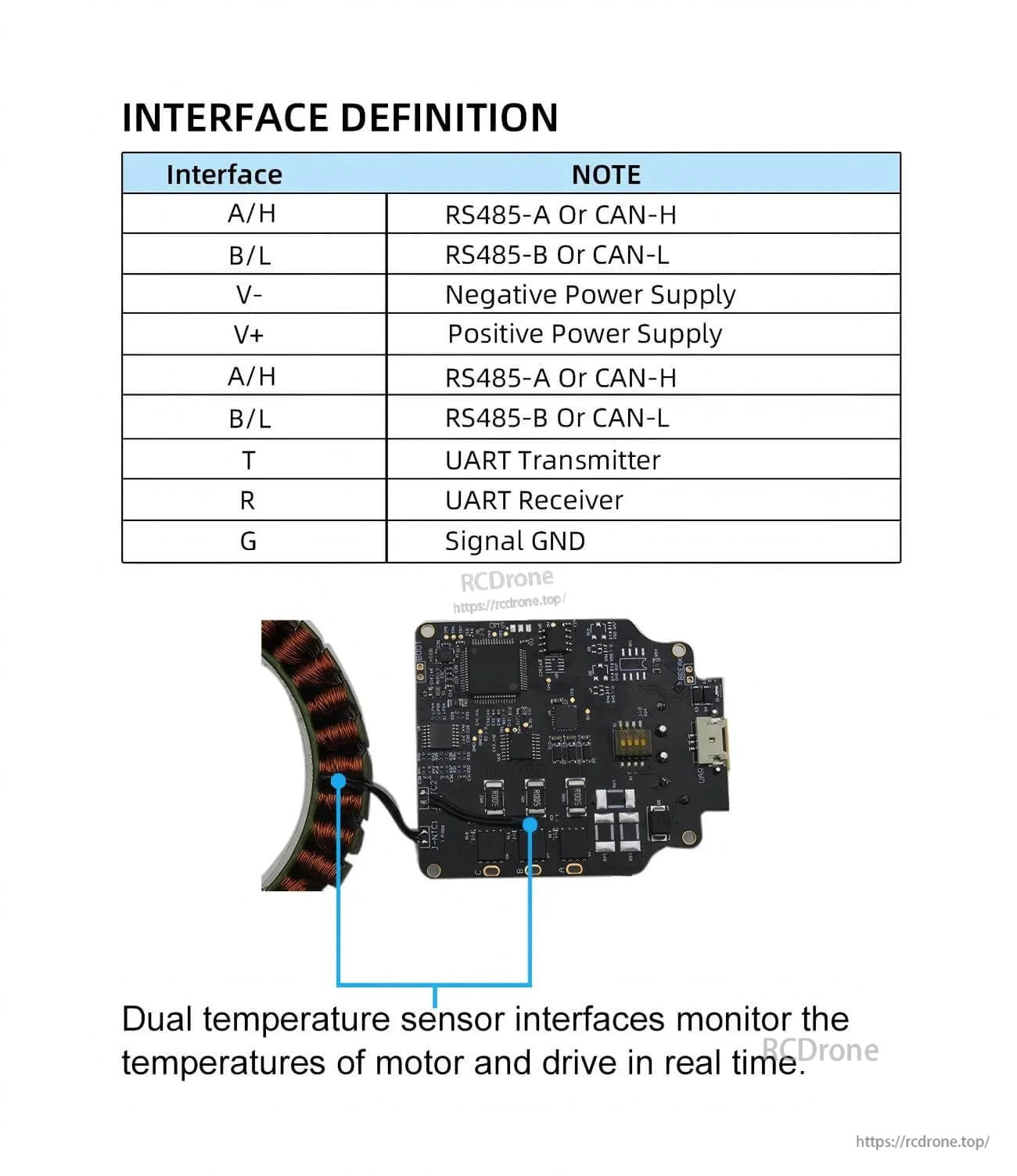
Die Verkabelung ist vereinfacht mit klar definierten Anschlüssen für Stromversorgung, RS485/CAN-Kommunikation und UART-Signalverbindungen.
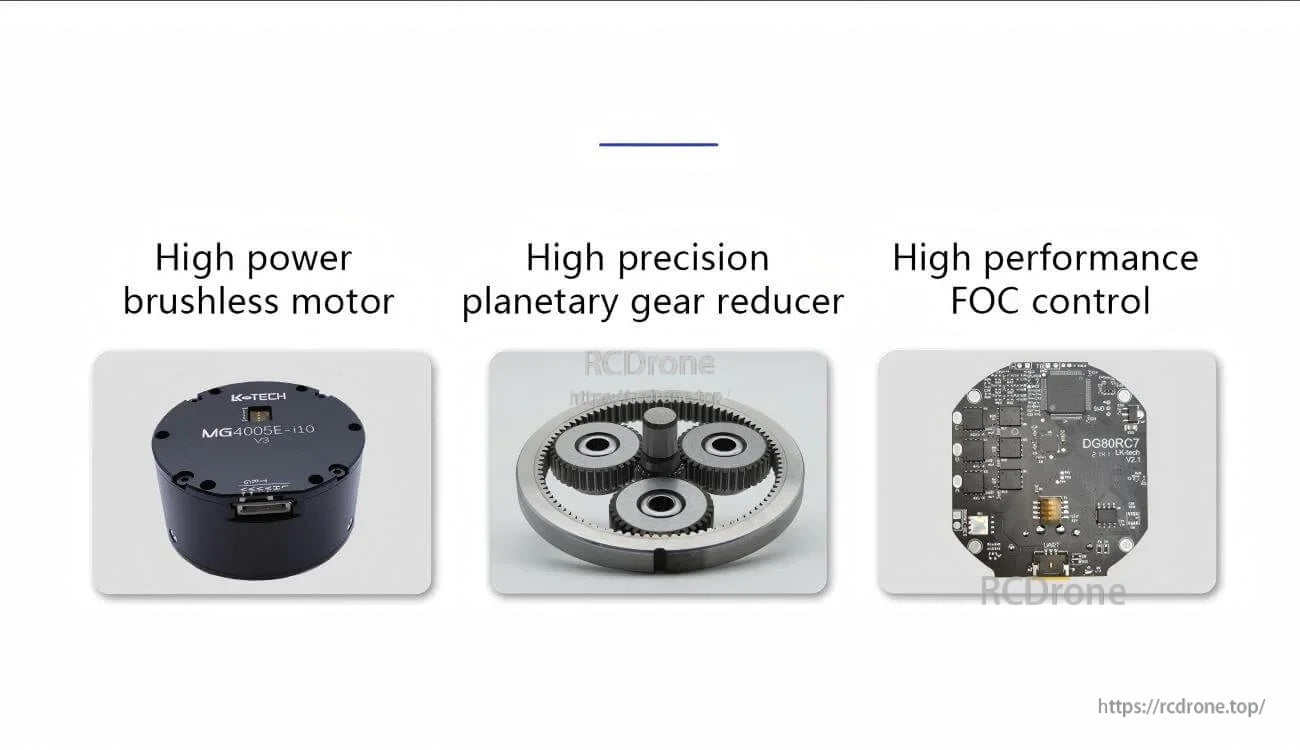
Ein bürstenloser Motor, präzise planetarische Getriebe und FOC-Steuerung unterstützen eine sanfte Drehmomentabgabe und präzise Bewegungssteuerung.

Der Antrieb unterstützt RS485- oder CAN-Kommunikation und einen breiten Eingangsspannungsbereich (7,4–32V) für flexible Integration.
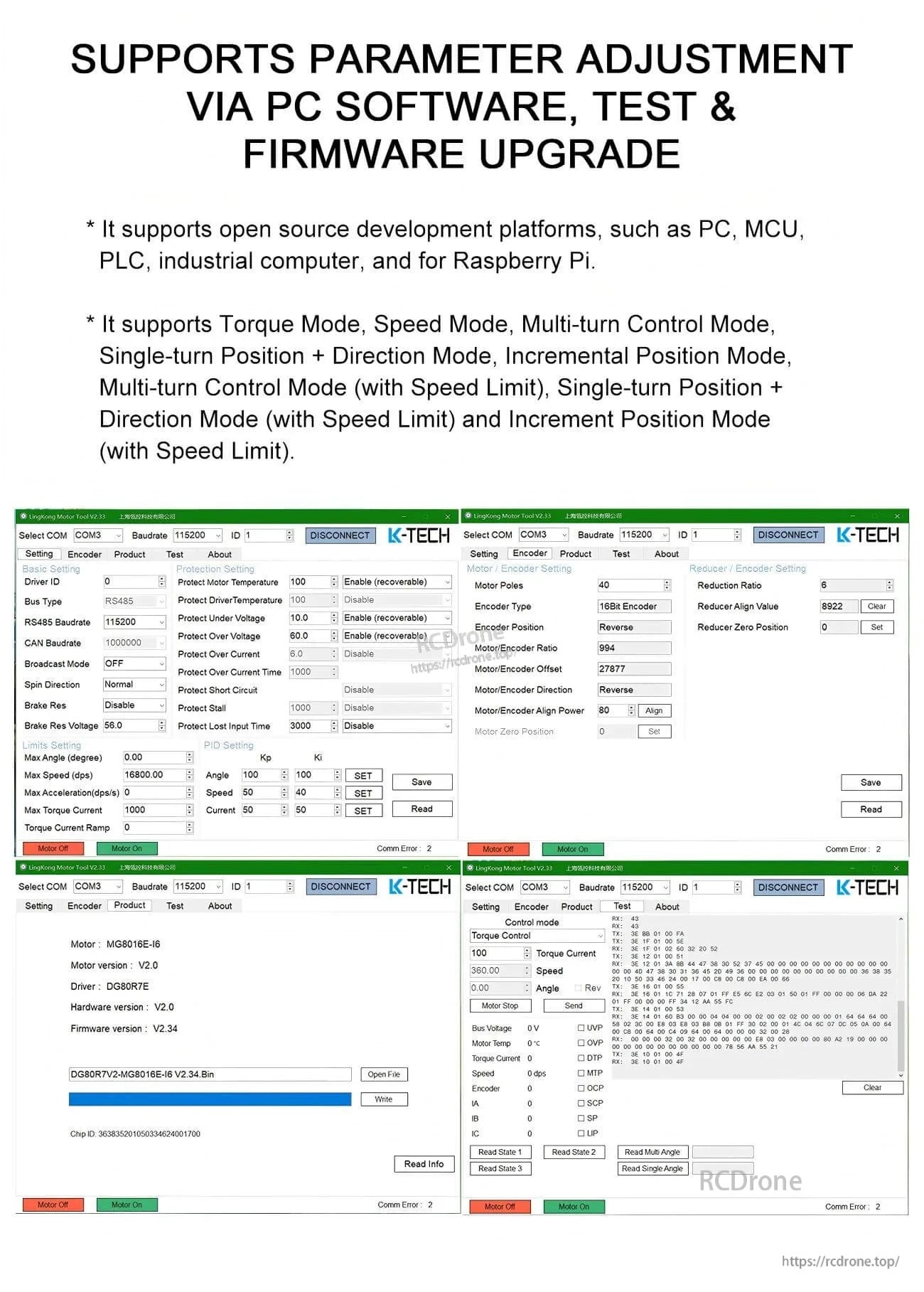
PC-Software ermöglicht die Parametrierung, Funktionstests und Firmware-Updates während der Inbetriebnahme und Wartung.
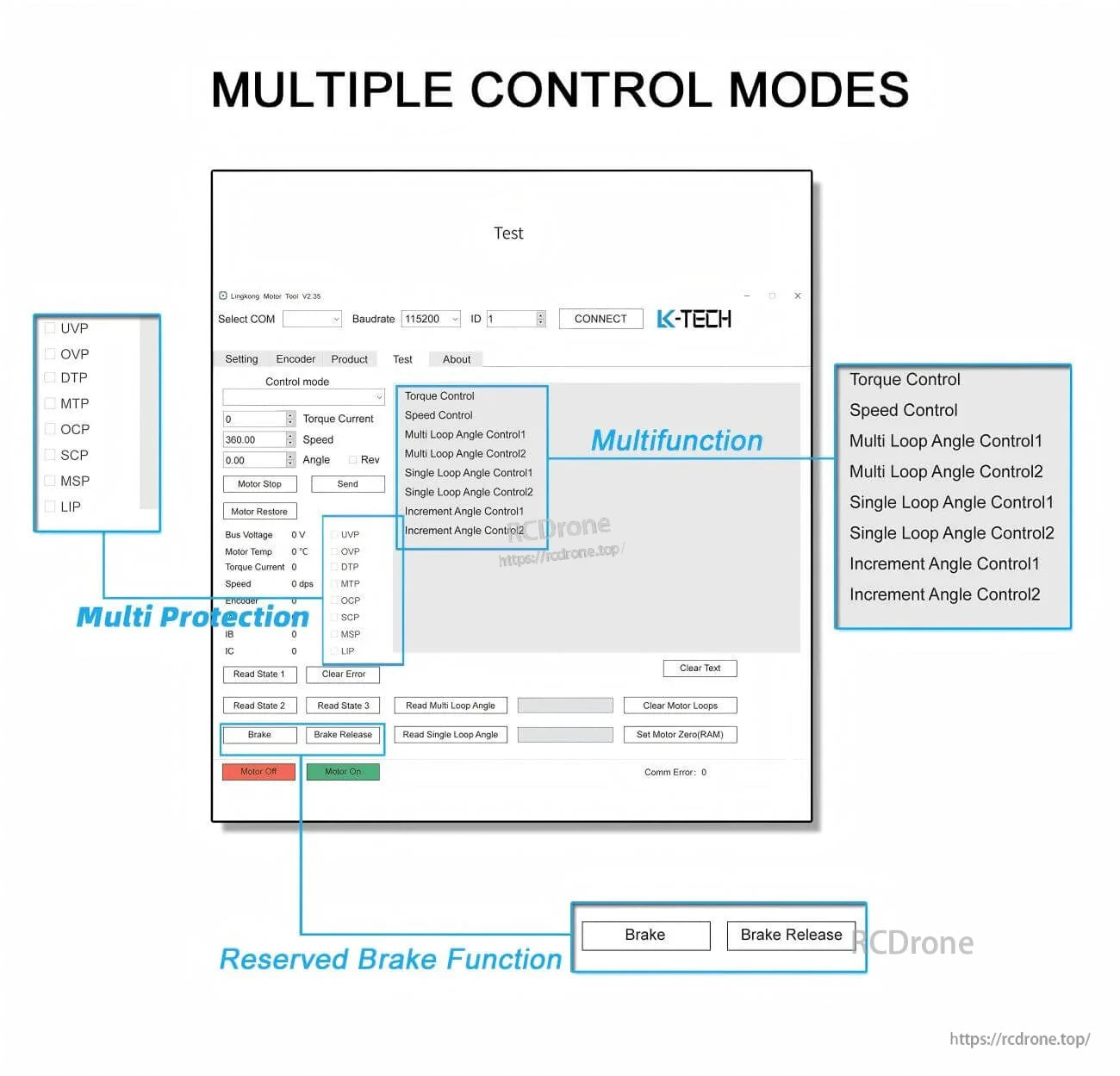
Wählen Sie aus mehreren Steuerungsmodi wie Drehmoment-, Geschwindigkeits- und Positionssteuerung, mit integrierter Überwachungsfunktion für den Schutzstatus.
Entwickelt für kompakte Betätigung in mobilen Robotern, gelenkigen Armen, Vierbeinern und tragbarer Robotik.
Related Collections




