




LKMTECH MG4010E-i10B-V3 Planetengetriebemotor mit Bremse, 24V 320U/min, RS485/CAN, 18-Bit-Encoder
LKMTECH MG4010E-i10B-V3 Planetengetriebemotor mit Bremse, 24V 320U/min, RS485/CAN, 18-Bit-Encoder
LKMTECH
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
LKMTECH MG4010E-i10B-V3 Motor ist ein Planetengetriebemotor mit Bremse, der für Robotik- und Automatisierungsaktoren entwickelt wurde, die eine kompakte Größe, ein getriebeabhängiges Drehmoment und Feldbuskommunikation (RS485 oder CAN) erfordern. Er verwendet einen 18-Bit-Magnetencoder und unterstützt Drehmoment-, Geschwindigkeits- und Positionsregelkreise.
Hauptmerkmale
- Zwei Stufen mit Bremsen Planetengetriebemotor (MG4010E-i10B-Serie)
- Übersetzungsverhältnis: 1:10; Spiel im Getriebe: 8 Bogenminuten (auch angegeben als ≤8 Bogenminuten)
- 18-Bit-Einzelumdrehungs-absolute Magnetencoder (18-Bit-Magnetencoder)
- Kommunikation: RS485 oder CAN
- Steuermodi/-schleifen: Drehmomentregelung (32KHz) / Geschwindigkeitsregelung (8KHz) / Positionsregelung (4KHz)
- Beschleunigungskurve: Trapezförmige Beschleunigung
- Eingebaute Bremse; Bremsentyp BG4906; Bremsmoment 3.2 N.m
- Benutzeroberflächenmerkmale: ID-Schalter
- Fahrzeugbezogener Text angezeigt: Eingebauter Bremsmechanismus; RS485 oder CAN-Bus-Kommunikation; Dual-Encoder, Nullpunkt nach dem Ausschalten merken; Eingangs Spannung 12-60V
Technische Daten
| Artikelname | MG4010E-i10B-V3 |
| Nennspannung | 24V |
| Maximale Geschwindigkeit | 320U/min |
| Nenn Geschwindigkeit | 260U/min |
| Nennmoment | 2.5N.m |
| Maximales Moment | 4.5N.m |
| Nennstrom | 3.5A |
| Maximale Leistung | 140W |
| Geschwindigkeitskonstante | 108.3U/min/V |
| Momentkonstante | 0.07N.m/A |
| Umdrehungen | 14 |
| Wicklungstyp | Y |
| Phasenwiderstand | 0.604Ω |
| Phaseninduktivität | 0.28mH |
| Motorpole | 28 |
| Rotormasse | 202gcm² |
| Motortemperatur | JA |
| Reduzierertyp | PG4210 |
| Übersetzungsverhältnis | 1:10 |
| Spiel | ≤8 Bogenminuten |
| Lagerrated Belastung | 1000N |
| Motorgewicht | 392g |
| Bremstyp | BG4906 |
| Bremmoment (N.m) | 3.2N.m |
| Startspannung (V) | 24V |
| Erhaltungs Spannung (V) | 7V |
| Erhaltungsleistung (W) | 1.4W |
| Empfohlener Antrieb | DG40 |
| Antriebseingangsspannung | 7.4-32V |
| Kommunikation | RS485 ODER CAN |
| Kommunikationsfrequenz | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | 18-Bit Magnet-Encoder |
| Encoder Baudrate (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate (CAN) | 100K, 125K, 250K, 500K, 1M |
| Steuermodus | Drehmomentregelung (32KHz)/Geschwindigkeitsregelung (8KHz)/Positionsregelung (4KHz) |
| Beschleunigungskurve | Trapezförmige Beschleunigung |
| Motorgröße | Φ 59*37 |
| Getriebe-Spiel | 8 Bogenminuten |
Schnittstellendefinition
- ID-Schalter
| Port | Anleitungen |
|---|---|
| A/H | RS485-A oder CAN-H |
| B/L | RS485-B oder CAN-L |
| V- | Negative Stromversorgung |
| V+ | Positive Stromversorgung |
| A/H | RS485-A oder CAN-H |
| B/L | RS485-B oder CAN-L |
| T | UART-Sender |
| R | UART-Empfänger |
| G | Signal GND |
Anwendungen
- Humanoide Roboter
- Roboterarme
- Exoskelette / Exoskelett-Roboter
- Quadruped-Roboter / Mecha-Hund
- AGV-Fahrzeuge / AGV-Auto
- ARU-Roboter
- Serviceroboter
- Handheld Lidar
- Rehabilitations-Trainingsroboter
- Inspektionsroboter
Handbücher
Für Integrationssupport und Fragen vor dem Kauf kontaktieren Sie [email protected] or besuchen Sie https://rcdrone.top/.
Details

Ein kompakter MG4010E-i10B-V3 Planetengetriebemotor mit integriertem Bremsmechanismus, 1:10 Übersetzung und ≤8 Bogenminuten Spiel für präzise robotische Gelenke.
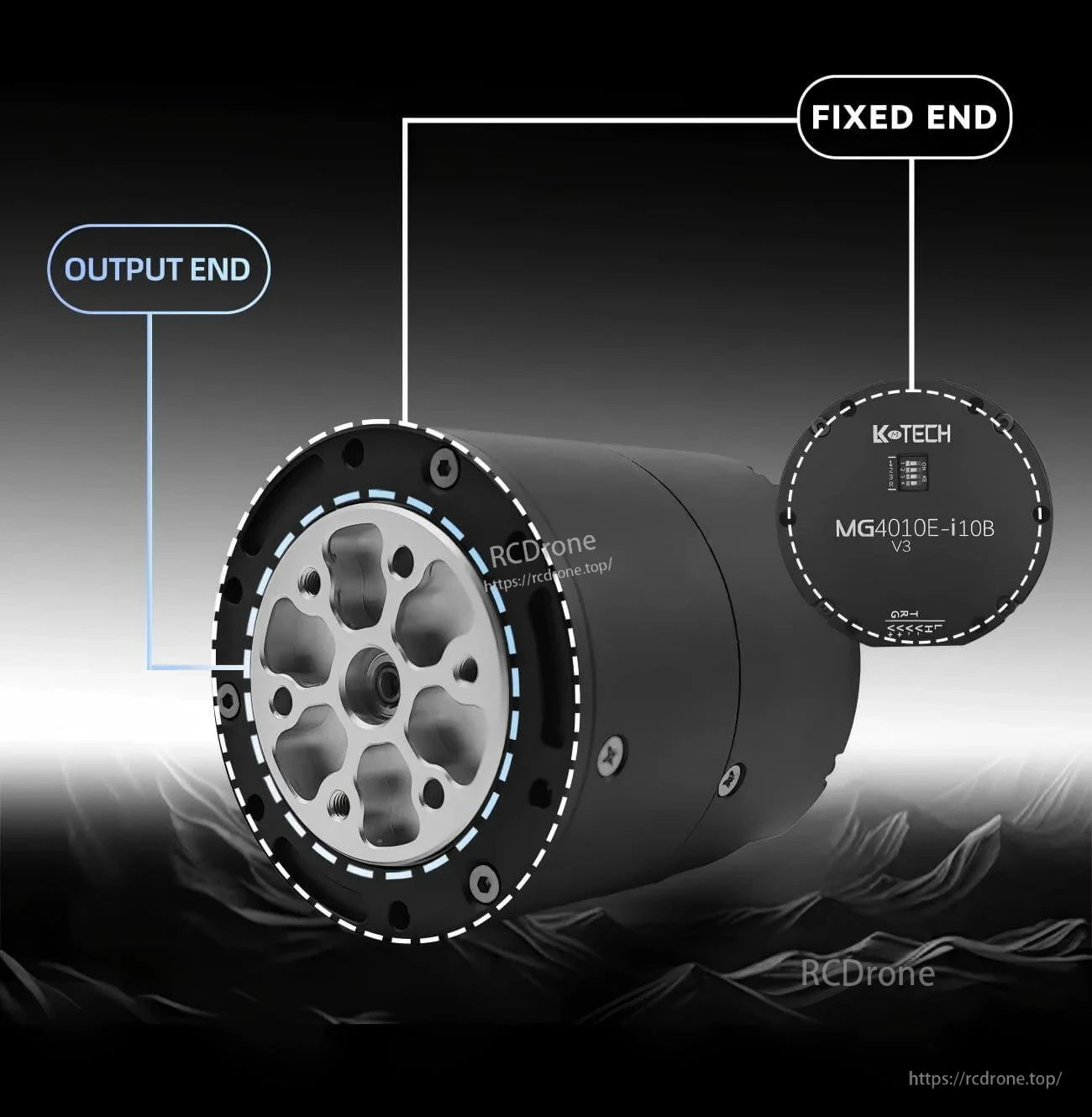
Die klare Identifizierung des Ausgangsende im Vergleich zum festen Ende erleichtert die mechanische Anordnung und die Verdrahtungsorientierung während der Integration.

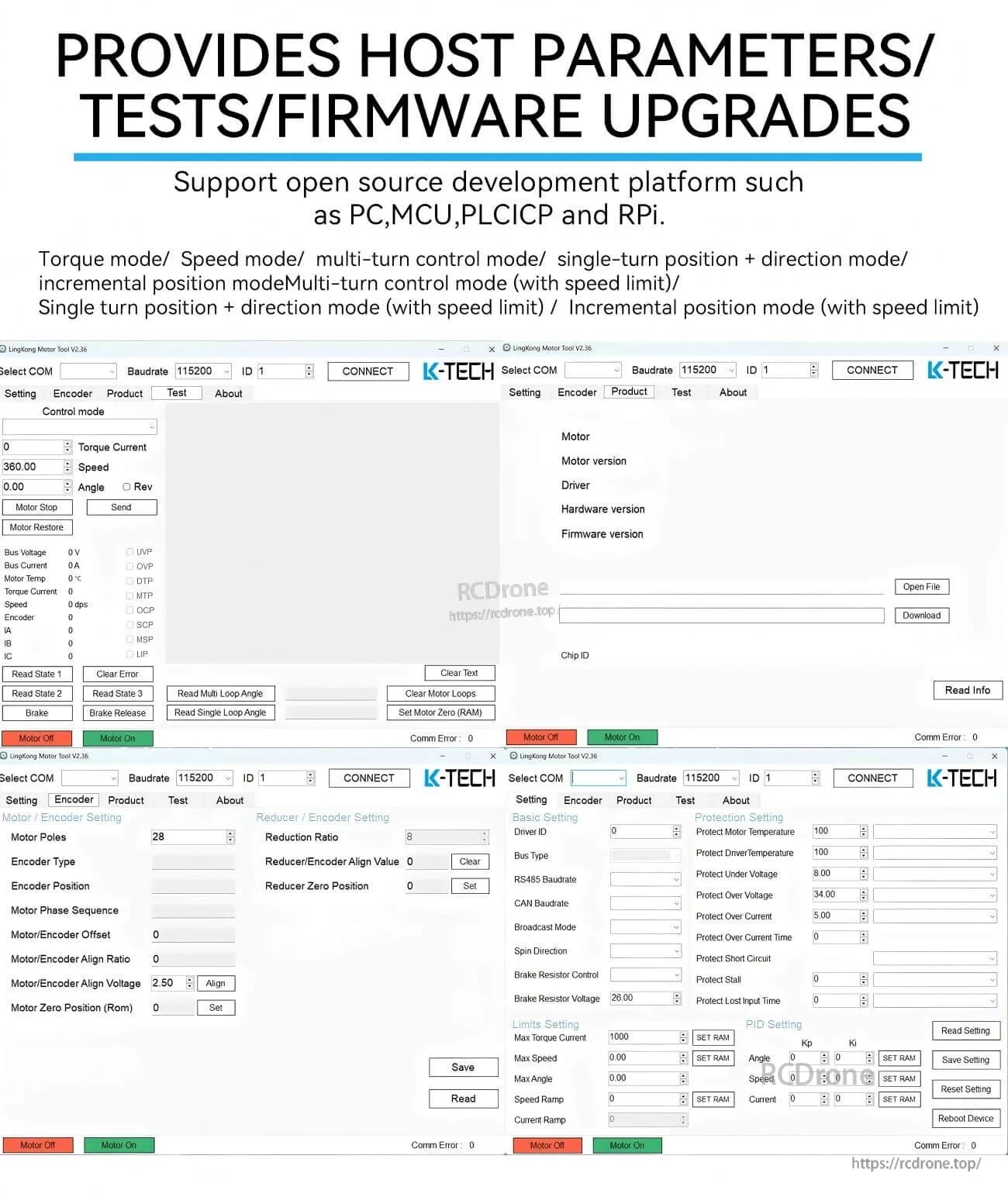
Ein 18-Bit-Einzelumdrehungs-absolute magnetische Encoder und RS485/CAN-Bus unterstützen Drehmoment-, Geschwindigkeits- und Positionskontrolle für Automatisierungsaktoren.
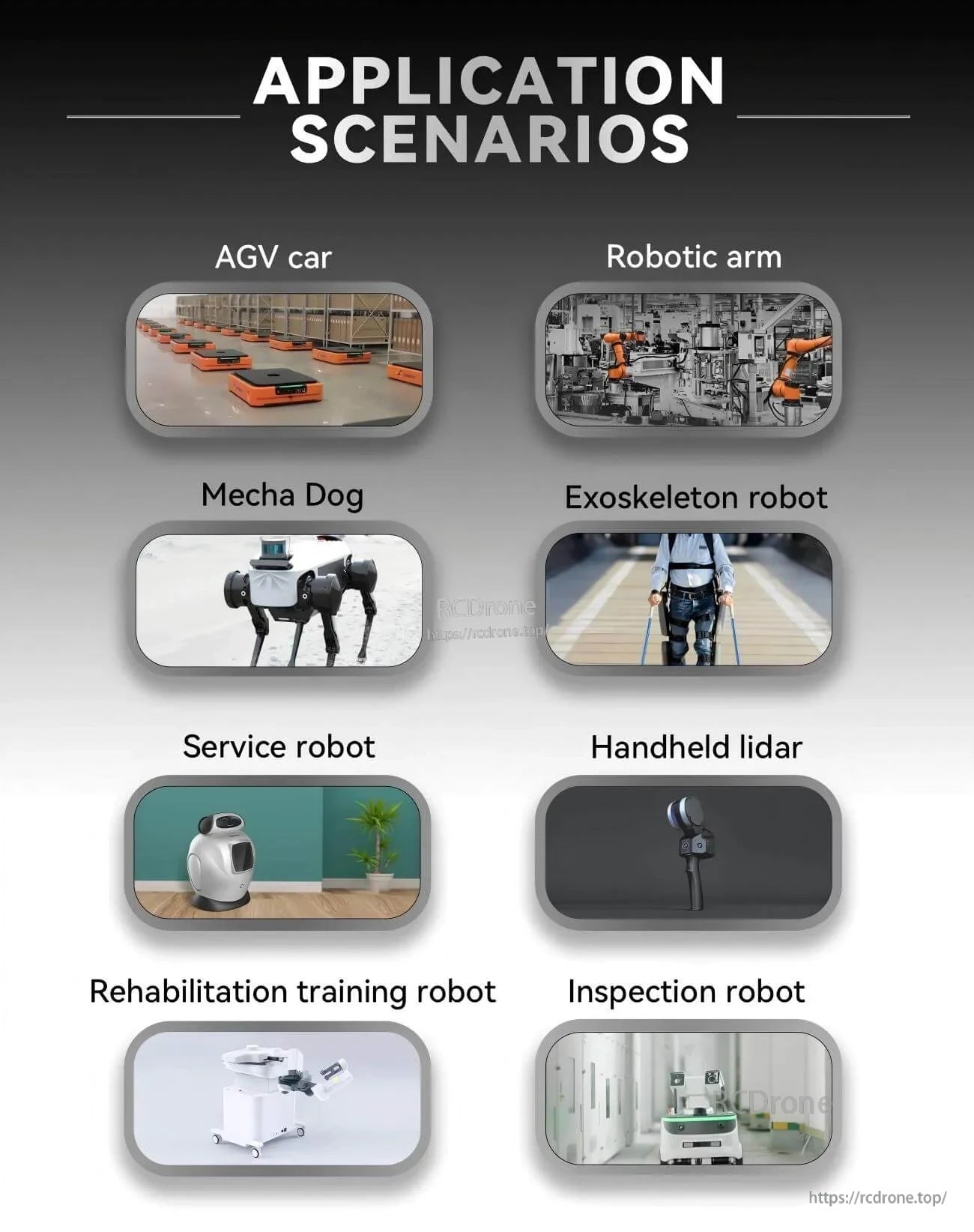
Entwickelt für Robotik- und Automatisierungsanwendungen, einschließlich AGVs, Roboterarme, vierbeinige Roboter, Exoskelette und Inspektionsplattformen.
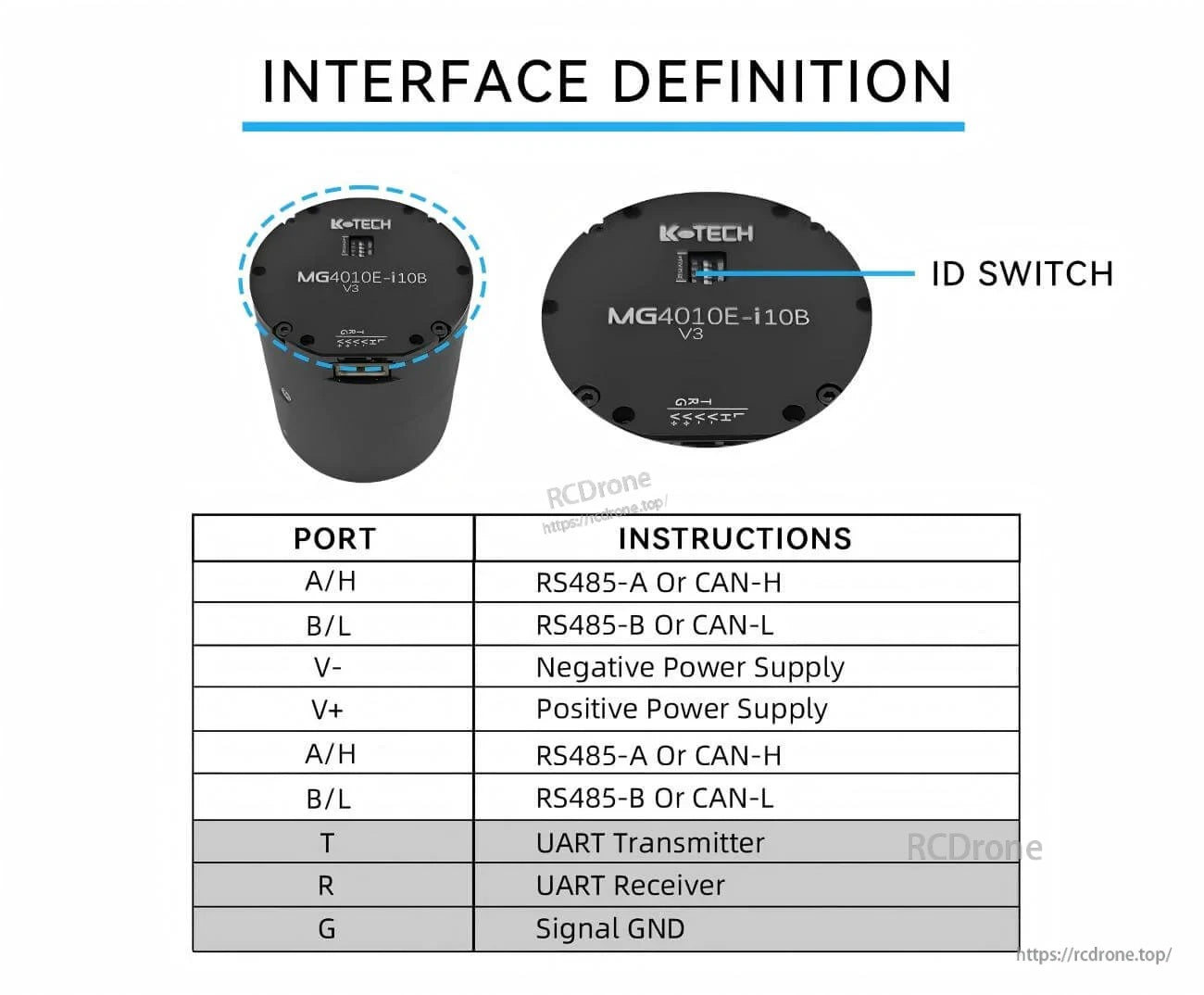
Die Portzuordnung umfasst RS485-A/CAN-H und RS485-B/CAN-L sowie Stromversorgung, UART TX/RX, Signalmasse und einen integrierten ID-Schalter.

Related Collections




