




LKMTECH MG4010E-i36-V3 Planetengetriebemotor 24V 1:36 RS485/CAN Magnetischer Encoder für Robotik
LKMTECH MG4010E-i36-V3 Planetengetriebemotor 24V 1:36 RS485/CAN Magnetischer Encoder für Robotik
LKMTECH
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Der LKMTECH MG4010E-i36-V3 Motor ist ein planetarischer Getriebemotor , der für Robotik und Bewegungssteuerungsaktoren entwickelt wurde. Er kombiniert einen bürstenlosen Motor, einen planetarischen Reduzierer und einen magnetischen Encoder, mit Kommunikationsoptionen, die als RS485 oder CAN aufgeführt sind.
Hauptmerkmale
- Planetarischer Getriebemotor (MG4010E-i36, V3).
- Übersetzungsverhältnis: 1:36 (auch als „Übersetzungsverhältnis 1:36“ angegeben).
- Getriebe-Spiel: 7 Bogenminuten (Bildbeschriftung) / 12 Bogenminuten (Spezifikationstabelle).
- Encoder: 18-Bit-Einzelfeld-absolute magnetische Encoder (Bildtext); auch als 18-Bit (Motor) + 14-Bit (Reduzierer) magnetischer Encoder (Spezifikationstabelle) aufgeführt.
- Kommunikation: RS485 oder CAN.
- Antrieb/FOC-Treiber referenziert (Bildtext: „Hochleistungs-FOC-Treiber“).
- Integrierte Bremse (Bildtext/UI-Beschriftung).
- Hostparameter/Tests/Firmware-Updates unterstützt (Bildtext).
Spezifikationen
| Artikelname | MG4010E-i36-V3 |
| Nennspannung | 24V |
| Maximale Geschwindigkeit | 90RPM |
| Nennspeed | 77RPM |
| Nennstrom | 2.4A |
| Maximale Leistung | 132W |
| Nennmoment | 6 N.m (Spezifikationstabelle) / 9 N.m (Bildbeschriftung) |
| Maximales Moment | 13 N.m (Spezifikationstabelle) / 18 N.m (Bildbeschriftung) |
| Geschwindigkeitskonstante | 3 rpm/V |
| Drehmomentkonstante | 2.58 N.m/A |
| Umdrehungen | 14 |
| Wicklungstyp | Y |
| Phasenwiderstand | 0.68 Ω |
| Phaseninduktivität | 0.25 mH |
| Motorpolung | 28 |
| Rotormasse | 158 gcm² |
| Motortemperatur | JA |
| Reduzierertyp | PG5336 |
| Übersetzungsverhältnis | 1:36 |
| Spiel | ≤12 Bogenminuten (Spezifikationstabelle) / 6 Bogenminuten (Bildetikett) |
| Lagerrated Belastung | 1120 N |
| Motorgewicht | 378 g |
| Empfohlener Antrieb | DG40E |
| Antriebseingangsspannung | 12-24V (Spezifikationstabelle) / 12-60V (Bildetikett) |
| Kommunikation | RS485 ODER CAN |
| Kommunikationsfrequenz | RS485: 500 Hz (115200 bps) / CAN: 2 KHz (1 Mbps) |
| Encoder | 18bit (Motor) + 14bit (Reduzierer) Magnetischer Encoder |
| Encoder Baudrate (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2 Mbps |
| Baudrate (CAN) | 100K, 125K, 250K, 500K, 1M |
| Steuermodus | Drehmomentregelung (24 KHz) / Geschwindigkeitsregelung (8 KHz) / Positionsregelung (4 KHz) |
| Beschleunigungskurve | Trapezförmige Beschleunigung |
| Motorgröße | Φ 53*54.5 (Bildbeschriftung) |
Schnittstellendefinition
- ID-Schalter (Bildbeschriftung: „ID SWITCH“).
| Port | Anleitungen |
|---|---|
| A/H | RS485-A oder CAN-H |
| B/L | RS485-B oder CAN-L |
| V- | Negative Stromversorgung |
| V+ | Positive Stromversorgung |
| T | UART-Sender |
| R | UART-Empfänger |
| G | Signal GND |
Anwendungsszenarien
- Humanoide Roboter
- Roboterarme
- Exoskelette
- Quadruped-Roboter
- AGV-Fahrzeuge / AGV-Auto
- ARU-Roboter
- Mecha-Hund
- Serviceroboter
- Handheld Lidar
- Rehabilitations-Trainingsroboter
- Inspektionsroboter
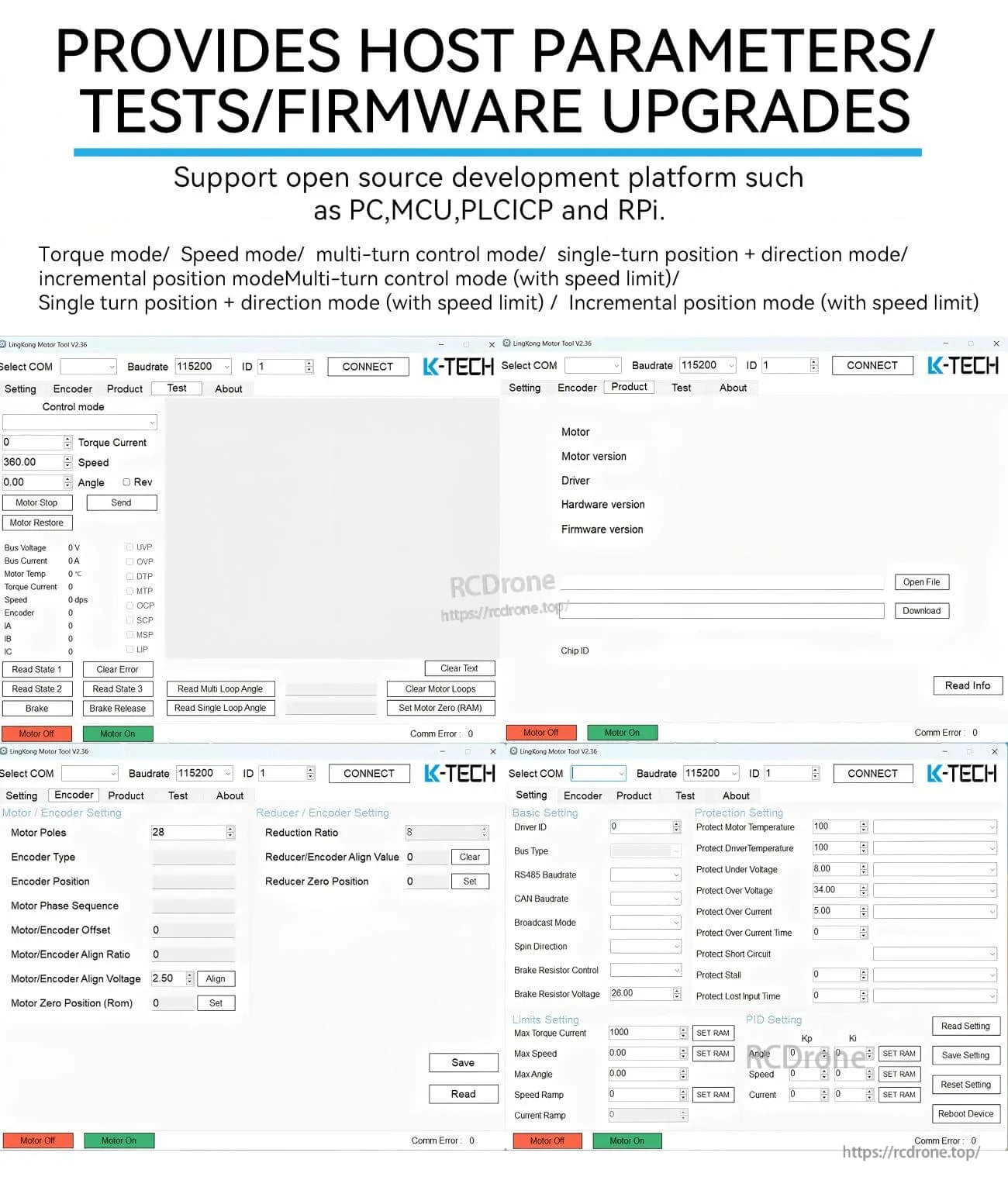
Steuerung & Software Hinweise
- Unterstützt Open-Source-Entwicklungsplattformen wie PC, MCU, PLC, ICP und RPi.
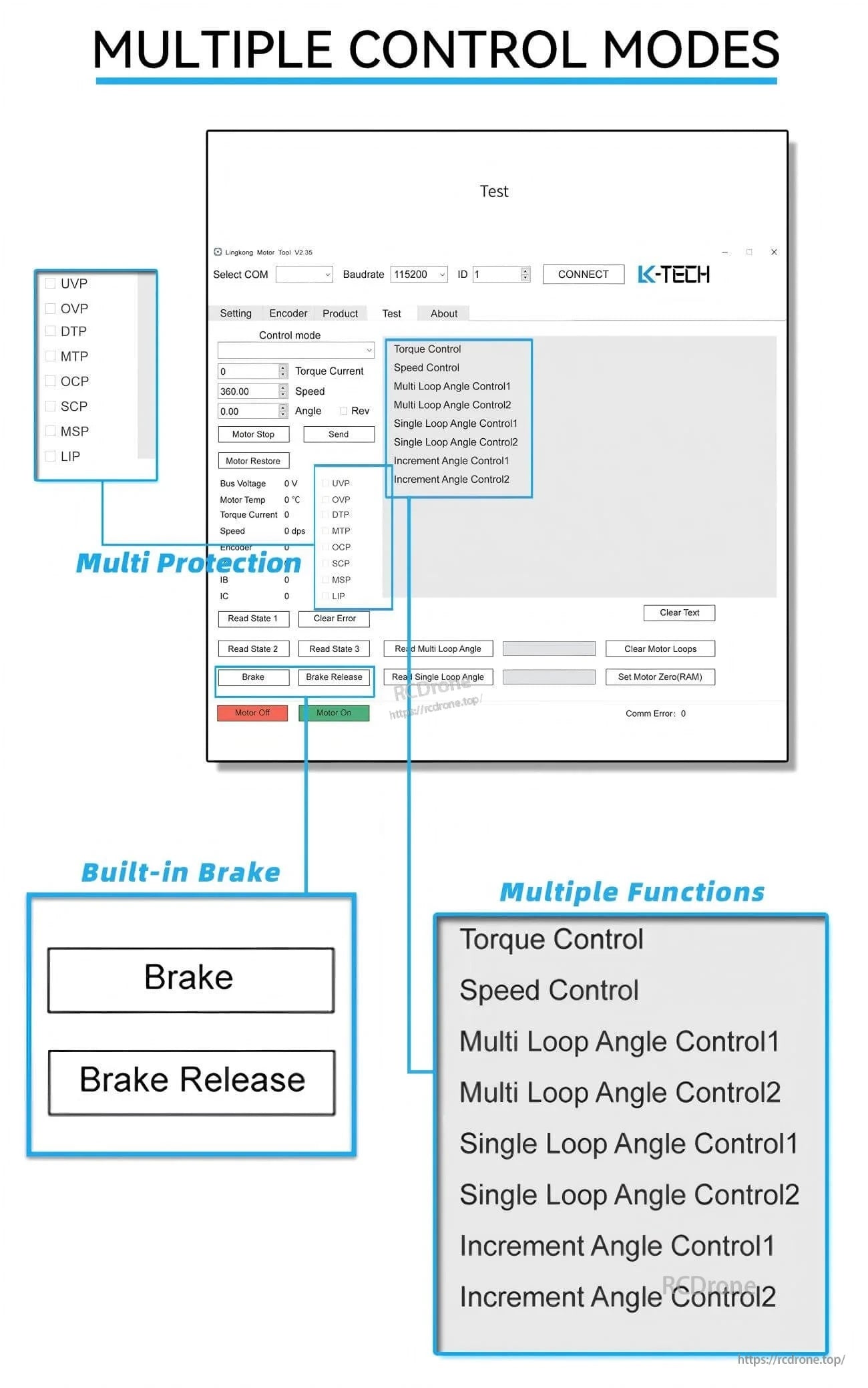
- Aufgelistete Modi (Bildtext): Drehmomentmodus, Geschwindigkeitsmodus, Mehrdrehungssteuerungsmodus, Einzeldrehungspositions- + Richtungsmodus, inkrementeller Positionsmodus; Versionen mit Geschwindigkeitsbegrenzung sind ebenfalls angezeigt.
- Mehrere Steuerungsmodi im UI angezeigt: Drehmomentsteuerung, Geschwindigkeitssteuerung, Mehrfachschleifenwinkelsteuerung1, Mehrfachschleifenwinkelsteuerung2, Einzelschleifenwinkelsteuerung1, Einzelschleifenwinkelsteuerung2, Inkrementwinkelsteuerung1, Inkrementwinkelsteuerung2.
- Mehrfachschutzlabels angezeigt: UVP, OVP, DTP, MTP, OCP, SCP, MSP, LIP.
- Integrierte Bremssteuerungen angezeigt: Bremse, Bremsfreigabe.
Für Kompatibilitätsprüfungen vor dem Verkauf (RS485/CAN-Integration, Baudratenauswahl) oder Hilfe beim Dateizugriff, kontaktieren Sie [email protected] or besuchen Sie https://rcdrone.top/.
Handbücher / Dokumente
Details

Der MG4010E-i36-V3 kombiniert einen bürstenlosen Motor, einen Planetengetriebe und einen magnetischen Encoder für kompakte robotische Aktuatoren.
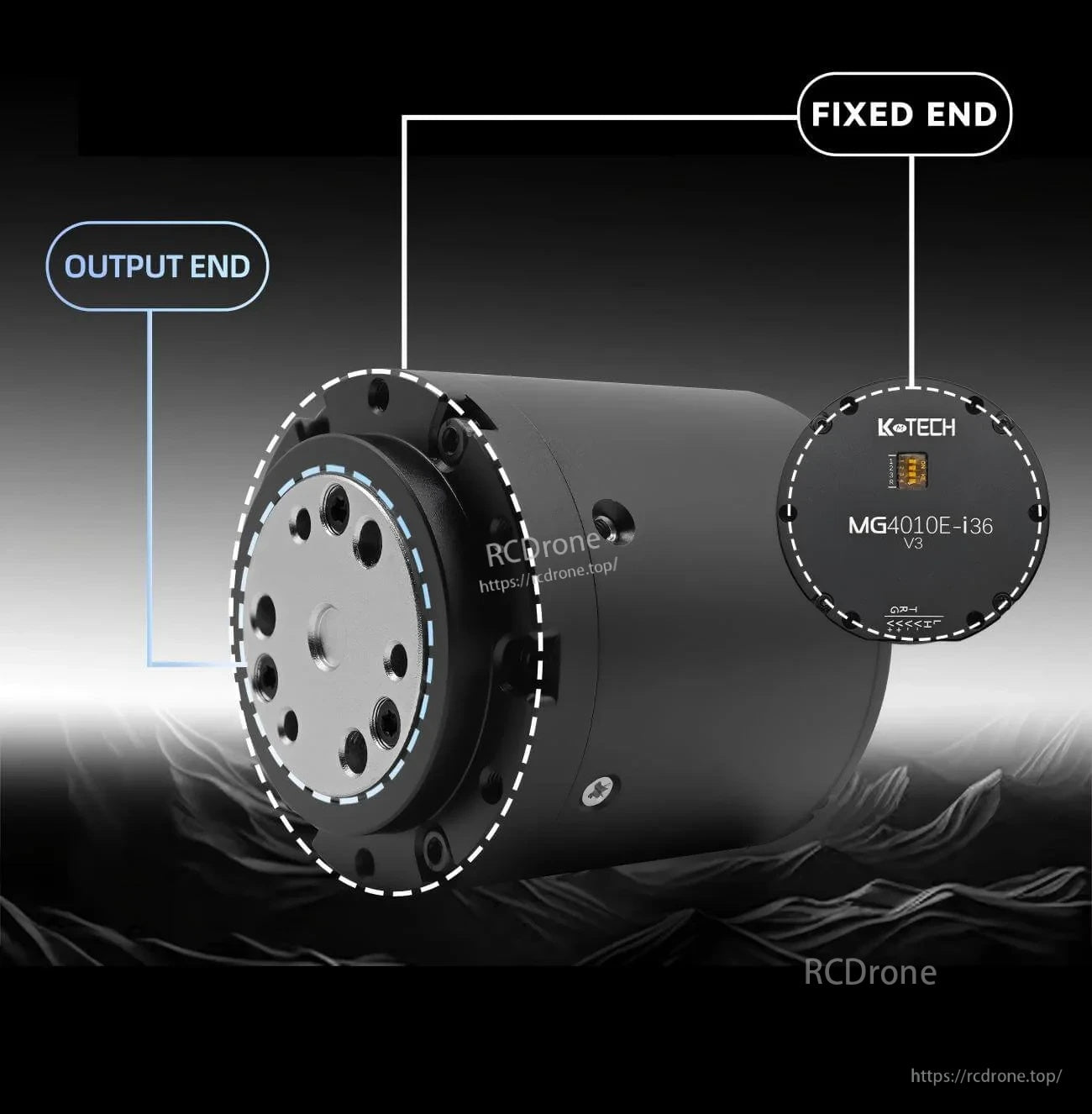
Ein Flansch-Ausgang und ein festes Endlayout erleichtern die Integration in Arme, Beine und andere Gelenkmodule.

RS485- oder CAN-Kommunikation kombiniert mit einem FOC-Treiber und absolutem magnetischem Encoder-Feedback für stabile Drehmoment-, Geschwindigkeits- und Positionsregelung.
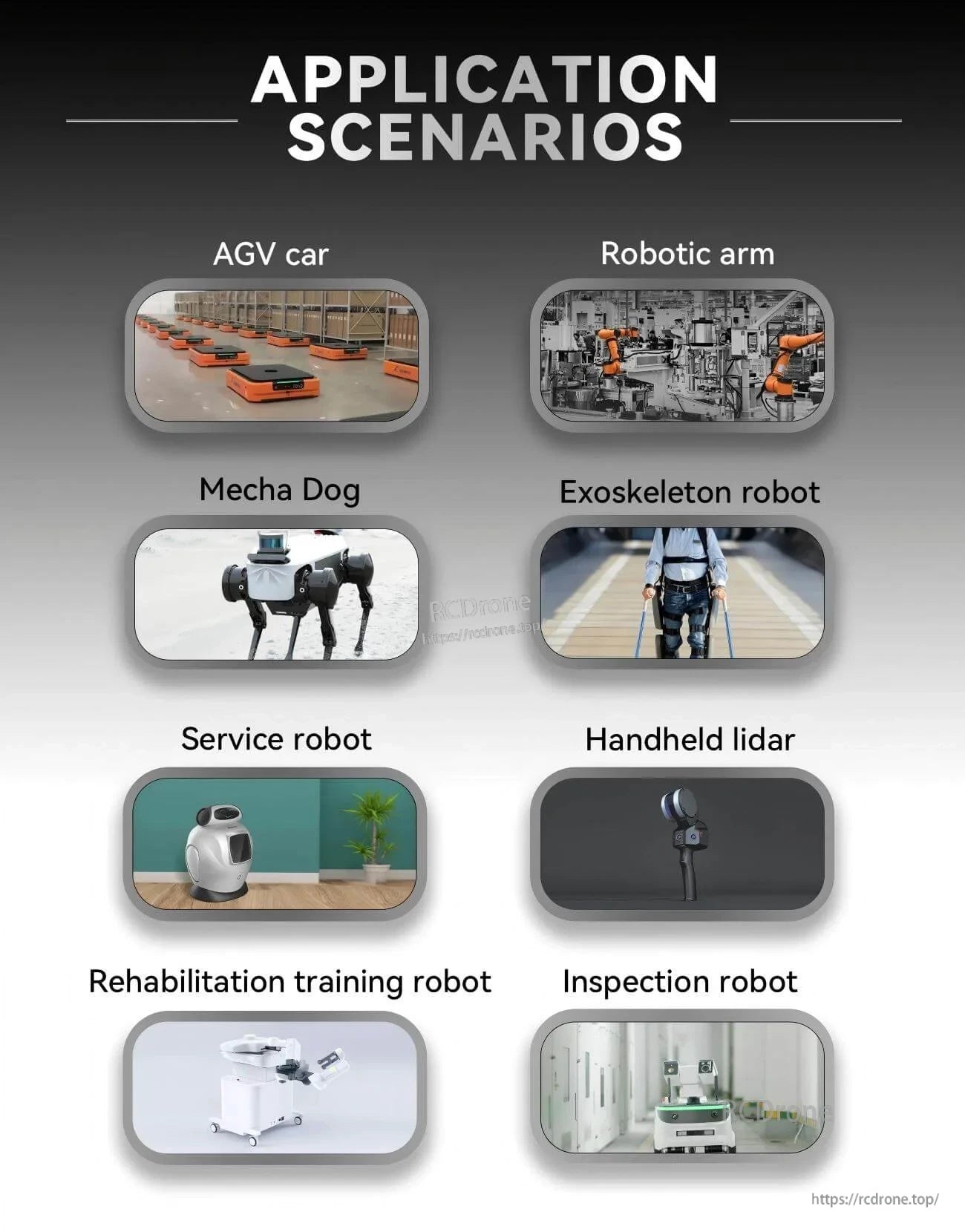
Typische Anwendungsfälle umfassen AGVs, Roboterarme, vierbeinige Plattformen, Exoskelette sowie Inspektions- oder Serviceroboter.
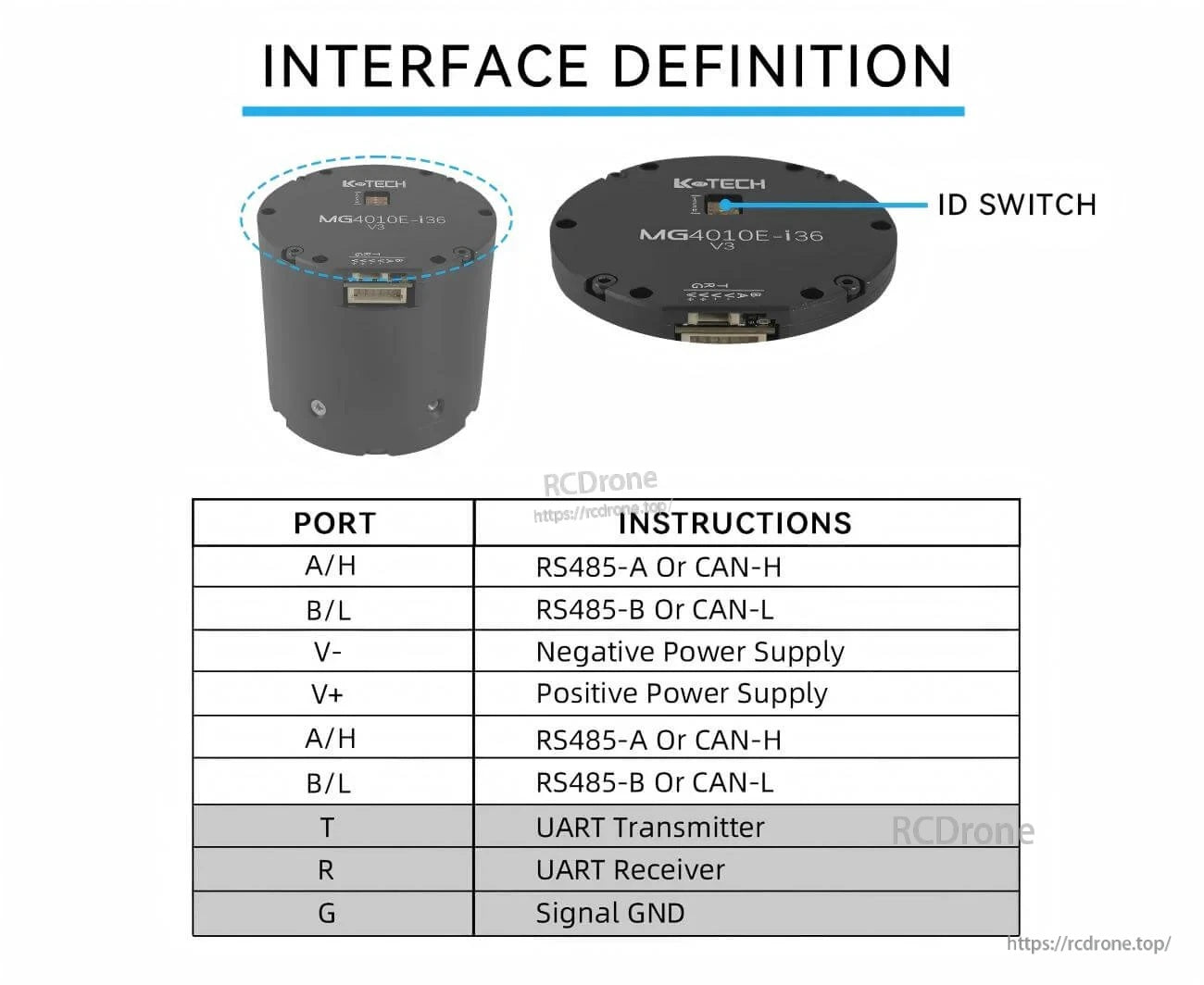
Die Verkabelung ist durch beschriftete RS485/CAN-Bus-Pins, Stromanschlüsse, UART Tx/Rx, Signalmasse und einen integrierten ID-Schalter vereinfacht.
Eingebaute Bremssteuerung und mehrere Betriebsmodi helfen, das Verhalten für verschiedene Bewegungssteuerungsaufgaben und Sicherheitsanforderungen anzupassen.
Related Collections




