




LKMTECH MG4010E-i36B-V3 Motor 24V 1:36 Planetengetriebemotor mit Bremse, RS485/CAN, Magnetischer Encoder
LKMTECH MG4010E-i36B-V3 Motor 24V 1:36 Planetengetriebemotor mit Bremse, RS485/CAN, Magnetischer Encoder
LKMTECH
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Der LKMTECH MG4010E-i36B-V3 Motor ist ein planetarischer Getriebemotor mit integriertem Brems- und Encoder-Feedback, der für die Aktuation in der Robotik entwickelt wurde, wo präzise Drehmoment-/Geschwindigkeits-/Positionskontrolle und kompakte Integration erforderlich sind. Er unterstützt RS485 oder CAN-Kommunikation und ist mit einem PG4210-Reduzierer (1:36) und einem dualen magnetischen Encoder (18-Bit Motor + 14-Bit Reduzierer) spezifiziert.
Hauptmerkmale
- Planetarischer Reduzierer: PG4210, Übersetzungsverhältnis 1:36, Spiel ≤12 Bogenminuten
- Encoder: 18-Bit (Motor) + 14-Bit (Reduzierer) magnetischer Encoder
- Kommunikation: RS485 oder CAN
- Regelkreise: Drehmomentregelkreis (32KHz) / Geschwindigkeitsregelkreis (8KHz) / Positionsregelkreis (4KHz)
- Beschleunigungskurve: Trapezförmige Beschleunigung
- Bremsen: BG4906, Bremsmoment 0.6N.m
- Motortemperatur: JA
Technische Spezifikationen
| Artikelname | MG4010E-i36B-V3 |
| Nennspannung | 24V |
| Maximale Geschwindigkeit | 90RPM |
| Nennspeed | 77RPM |
| Nennmoment | 6N.m |
| Maximales Moment | 13N.m |
| Nennstrom | 2.4A |
| Maximale Leistung | 132W |
| Geschwindigkeitskonstante | 3rpm/V |
| Momentkonstante | 2.58N.m/A |
| Umdrehungen | 14 |
| Wicklungstyp | Y |
| Phasenwiderstand | 0.68Ω |
| Phaseninduktivität | 0.25mH |
| Motorpolen | 28 |
| Rotormasse | 158gcm² |
| Motortemperatur | JA |
| Reduzierertyp | PG4210 |
| Übersetzungsverhältnis | 1:36 |
| Spiel | ≤12 Bogenminuten |
| Lagerrated Belastung | 1120N |
| Motorgewicht | 542.5g |
| Bremstyp | BG4906 |
| Bremmoment (N.m) | 0.6N.m |
| Startspannung (V) | 24V |
| Haltspannung (V) | 7V |
| Haltleistung (W) | 1.4W |
| Empfohlener Antrieb | DG40E |
| Antriebseingangsspannung | 7.4-32V |
| Kommunikation | RS485 ODER CAN |
| Kommunikationsfrequenz | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | 18bit(Motor)+14bit(Getriebe) Magnet-Encoder |
| Encoder Baudrate (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate (CAN) | 100K, 125K, 250K, 500K, 1M |
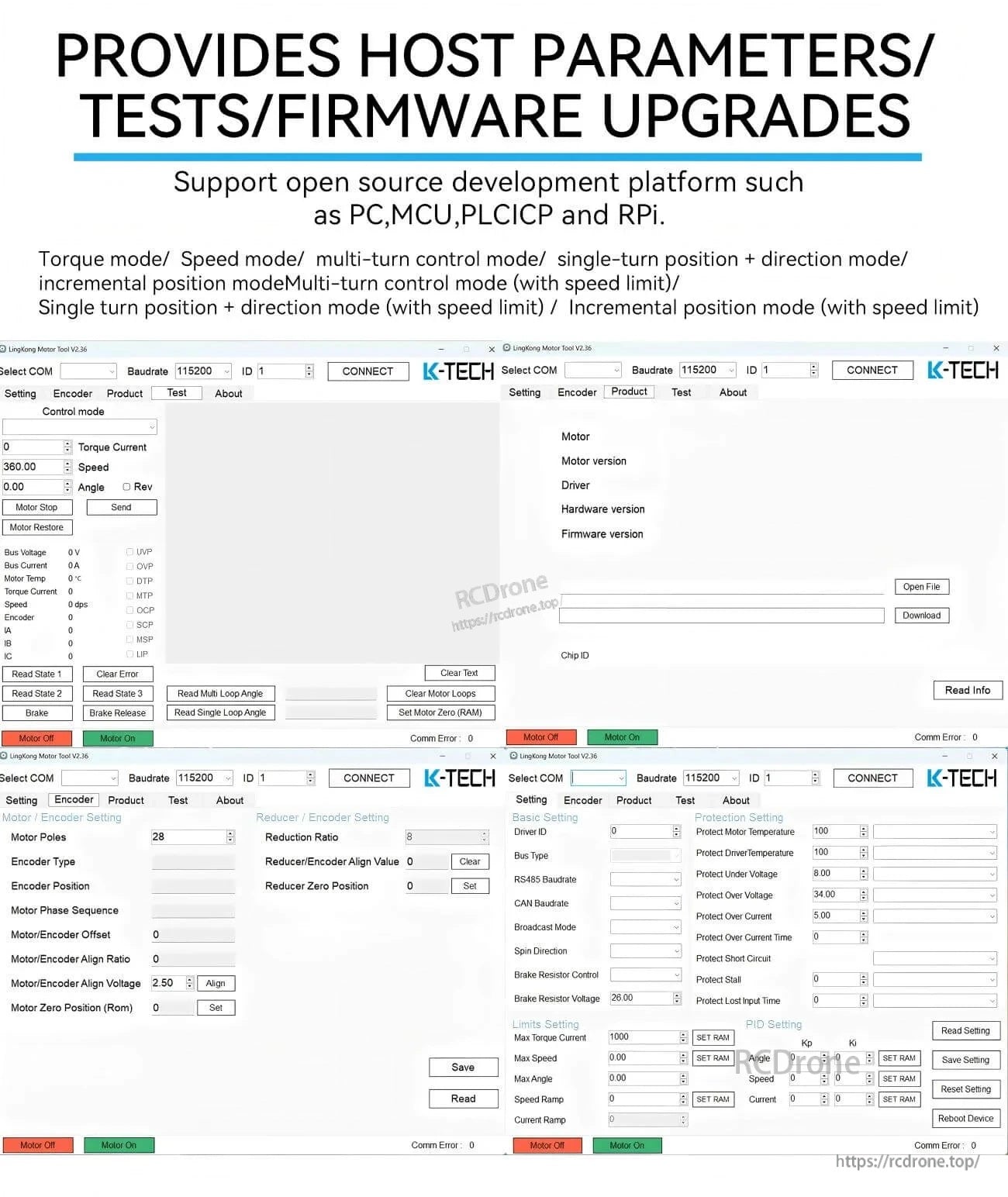
| Steuermodus | Drehmomentregelung(32KHz)/Geschwindigkeitsregelung(8KHz)/Positionsregelung(4KHz) |
| Beschleunigungskurve | Trapezförmige Beschleunigung |
Schnittstellendefinition (Ports)
Portbedeutungen für diese Motorserie:
- A/H: RS485-A oder CAN-H
- B/L: RS485-B oder CAN-L
- V-: Negative Stromversorgung
- V+: Positive Stromversorgung
- T: UART-Transmitter
- R: UART-Empfänger
- G: Signal GND
- ID-Schalter
Anwendungen
- Humanoide Roboter
- Roboterarme
- Exoskelette
- Quadruped-Roboter
- AGV-Fahrzeuge
- ARU-Roboter
Handbücher / Dokumente
Für Integrationsunterstützung und Vorverkaufs-Kompatibilitätsprüfungen kontaktieren Sie [email protected] or besuchen Sie https://rcdrone.top/.
Details

Kompakte Planetengetriebemotorbauweise integriert die Bremse und die Onboard-Schnittstelle in einem einzigen Aktuator Paket.
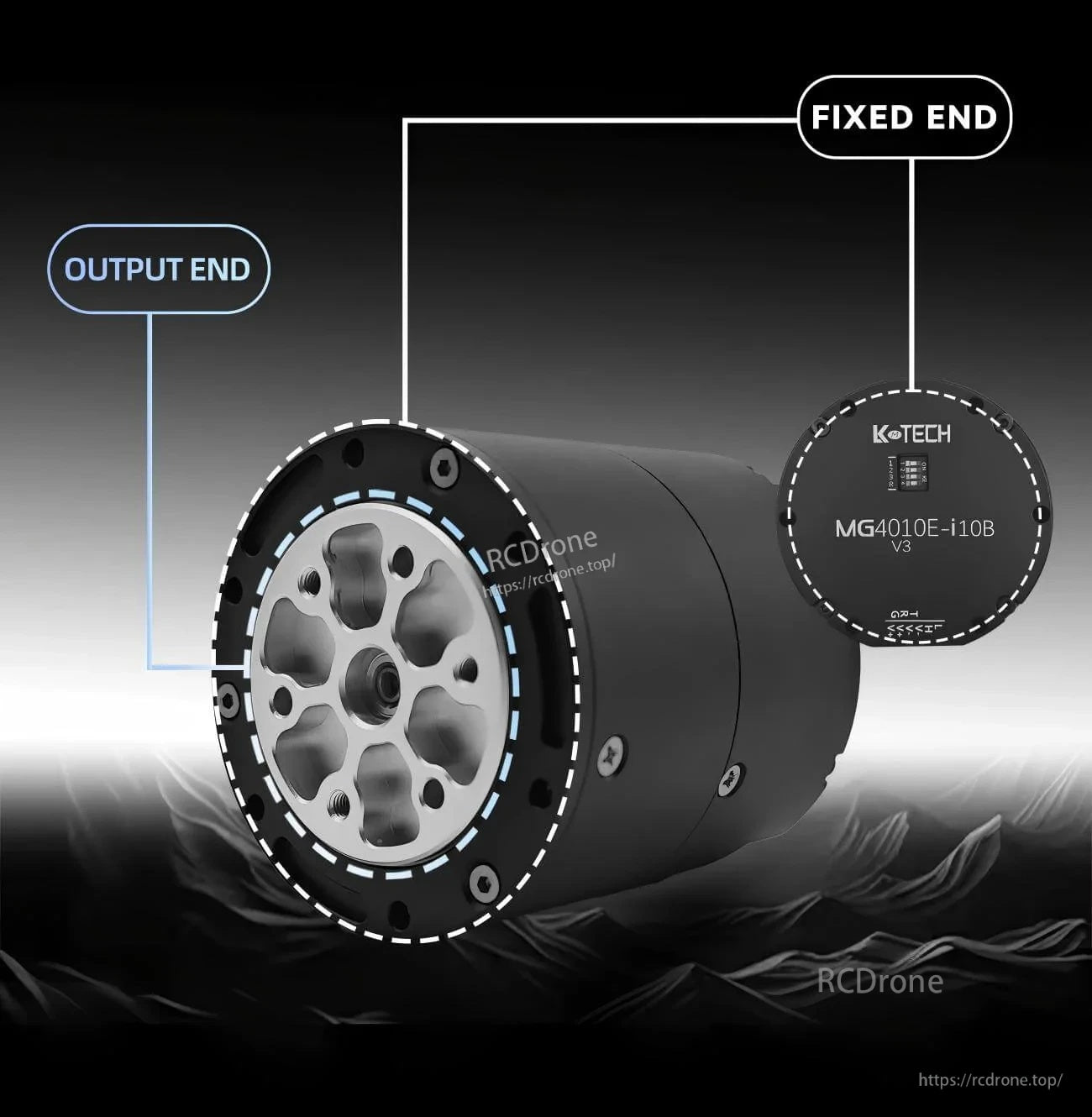
Ein klar definierter Ausgangs- und Festpunkt hilft, die mechanische Integration und Ausrichtung in Baugruppen zu vereinfachen.

Encoder-Feedback und Buskommunikation unterstützen eine stabile Drehmoment-, Geschwindigkeits- und Positionsregelung für Robotergelenke.
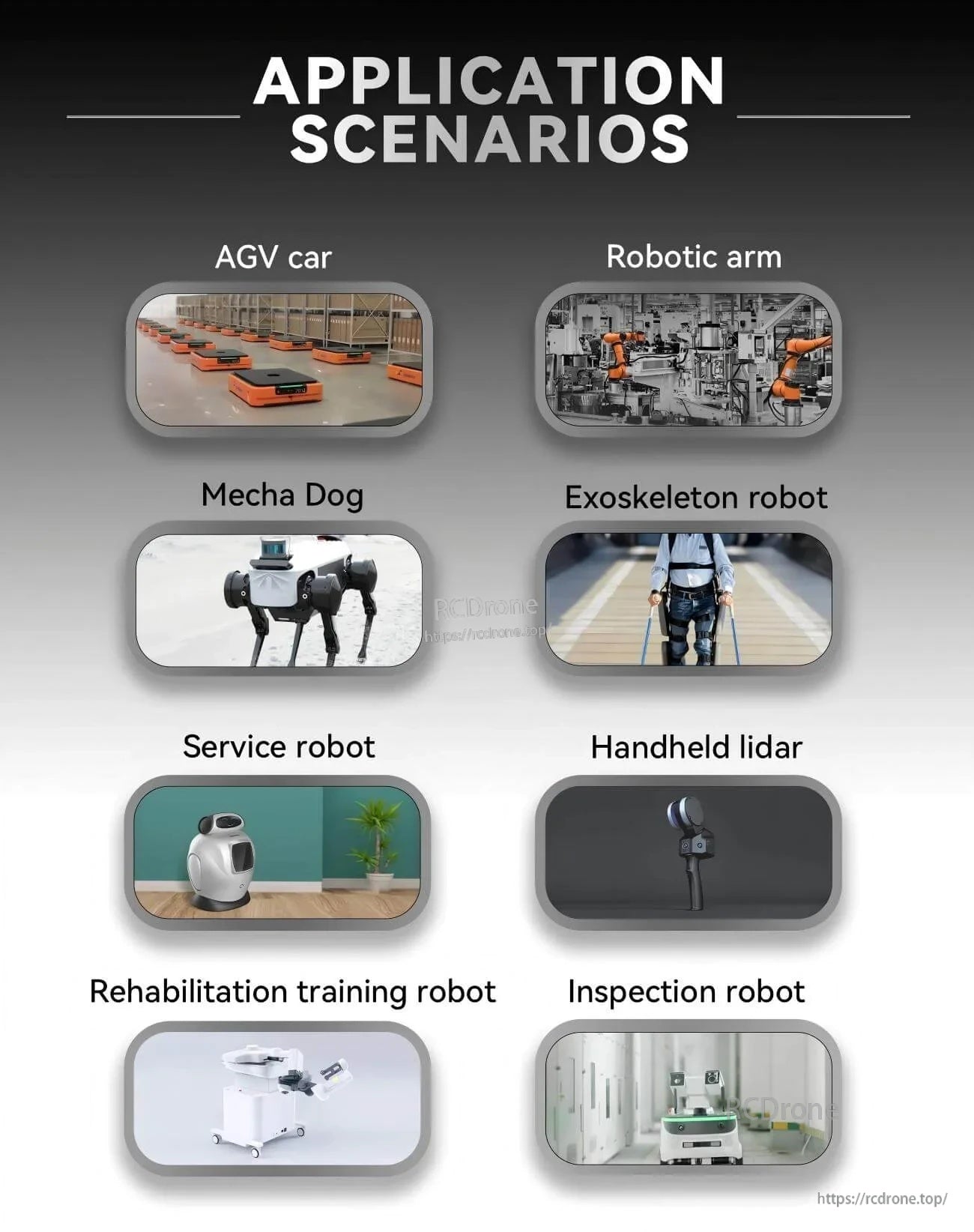
Entwickelt für Roboterantriebsaufgaben von AGVs und Roboterarmen bis hin zu beinbetriebenen Robotern und Exoskelettsystemen.
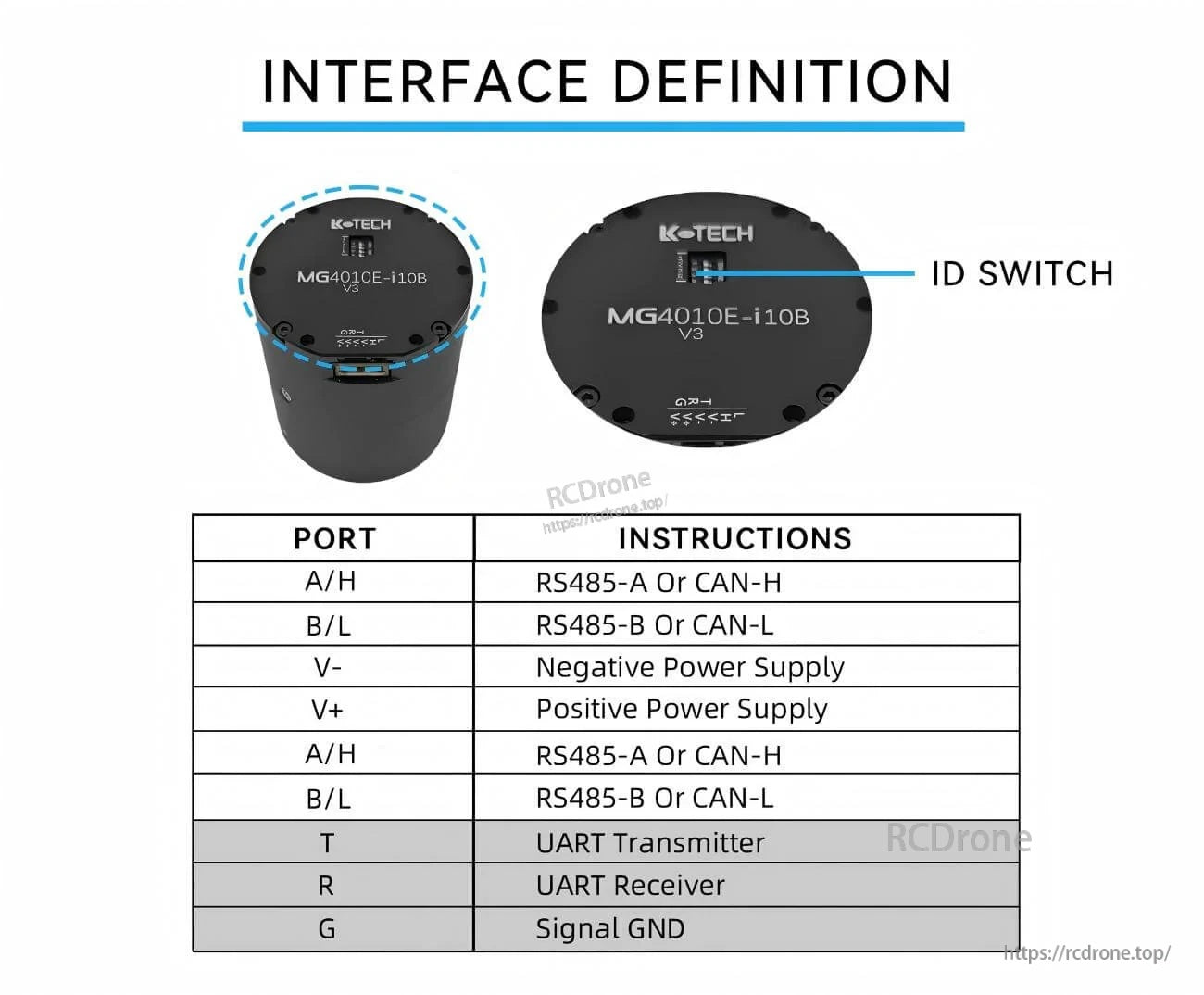
Portdefinitionen umfassen Stromversorgung, RS485/CAN Verkabelung und UART-Pins, mit einem Onboard-ID-Schalter zur Adressierung.

Related Collections




