




LKMTECH MG5010E-i10-V3 Motor 24V 160W 1:10 Planetengetriebe, RS485/CAN, 18-Bit-Encoder
LKMTECH MG5010E-i10-V3 Motor 24V 160W 1:10 Planetengetriebe, RS485/CAN, 18-Bit-Encoder
LKMTECH
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Der LKMTECH MG5010E-i10-V3 Motor ist ein bürstenloser Motor mit einem Planetengetriebe und integriertem Encoder für Robotik- und Bewegungssteuerungsanwendungen. Er ist für den Betrieb mit 24V ausgelegt und unterstützt RS485 oder CAN-Kommunikation, wenn er mit dem empfohlenen Antrieb verwendet wird.
Hauptmerkmale
- Hochleistungsbürstenloser Motor + hochpräzises Planetengetriebe
- Nennmoment 4 N.m; max. Moment 7 N.m
- Übersetzungsverhältnis 1:10 (Getriebeart: PG5110)
- 18-Bit-Magnetencoder (Motorseite)
- Kommunikationsoptionen: RS485 oder CAN (mit empfohlenem Antrieb DG40E)
- Motortemperatur: JA
- Doppelte Temperatursensor-Schnittstelle zur Echtzeitüberwachung der Motor- und Treibertemperatur
- Hervorhebungen des Antriebs: Eingangsspannung 7.4-32V; RS485 oder CAN-Bus-Kommunikation; doppelte Encoder mit Nullpunkt-Speicher nach dem Ausschalten
Technische Daten
| Artikelname | MG5010E-i10-V3 |
| Nennspannung | 24V |
| Maximale Geschwindigkeit | 320RPM |
| Nennspeed | 235RPM |
| Nennmoment | 4 N.m |
| Maximales Moment | 7 N.m |
| Nenstrom | 4.4A |
| Maximale Leistung | 160W |
| Geschwindigkeitskonstante | 97.9 rpm/V |
| Momentkonstante | 0.1 N.m/A |
| Umdrehungen | 13 |
| Wicklungsart | Y |
| Phasenwiderstand | 0.466Ω |
| Phaseninduktivität | 0.26mH |
| Motorpolzahlen | 28 |
| Rotormoment | 850 gcm² |
| Motortemperatur | JA |
| Reduzierertyp | PG5110 |
| Übersetzungsverhältnis | 1:10 |
| Spiel | 6 Bogenminuten (auch als ≤8 Bogenminuten angegeben) |
| Lagerrated Belastung | 1000N |
| Motorgewicht | 420g |
| Größe | Φ63*41.5 |
| Empfohlener Antrieb | DG40E |
| Antriebseingangsspannung | 7.4-32V |
| Kommunikation | RS485 ODER CAN |
| Kommunikationsfrequenz | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) |
| Encoder | 18-Bit Magnet-Encoder |
| Encoder Baudrate (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate (CAN) | 1M |
| Steuermodus | Drehmomentregelung (32KHz) / Geschwindigkeitsregelung (8KHz) / Positionsregelung (4KHz) |
| Beschleunigungskurve | Trapezförmige Beschleunigung |
Schnittstellendefinition
| Schnittstelle | Hinweis |
|---|---|
| A/H | RS485-A oder CAN-H |
| B/L | RS485-B oder CAN-L |
| V- | Negative Stromversorgung |
| V+ | Positive Stromversorgung |
| A/H | RS485-A oder CAN-H |
| B/L | RS485-B oder CAN-L |
| T | UART-Sender |
| R | UART-Empfänger |
| G | Signal GND |
Anwendungen
- Humanoide Roboter
- Roboterarme
- Exoskelette / tragbare Roboter
- Quadrupedale Roboter / Roboterhund-Plattformen
- AGV-Fahrzeuge / AGV-Auto
- ARU-Roboter
Für Auswahlberatung und Integrationsunterstützung kontaktieren Sie https://rcdrone.top/ oder senden Sie eine E-Mail an [email protected].
Handbücher
Details

MG5010E-i10-V3 integriert einen bürstenlosen Motor und ein Planetengetriebe in einem kompakten Aktuator für Robotik und Bewegungssteuerung.

Ein 1:10 Planetengetriebe-Reduzierer hilft, ein höheres Drehmoment und eine stabile Positionierung für Gelenk- und Radantriebsaufbauten zu liefern.


Ein 18-Bit-Magnetencoder auf der Motorseite unterstützt präzises Feedback; einige Setups verwenden auch einen zusätzlichen Encoder auf der Reduziererseite.
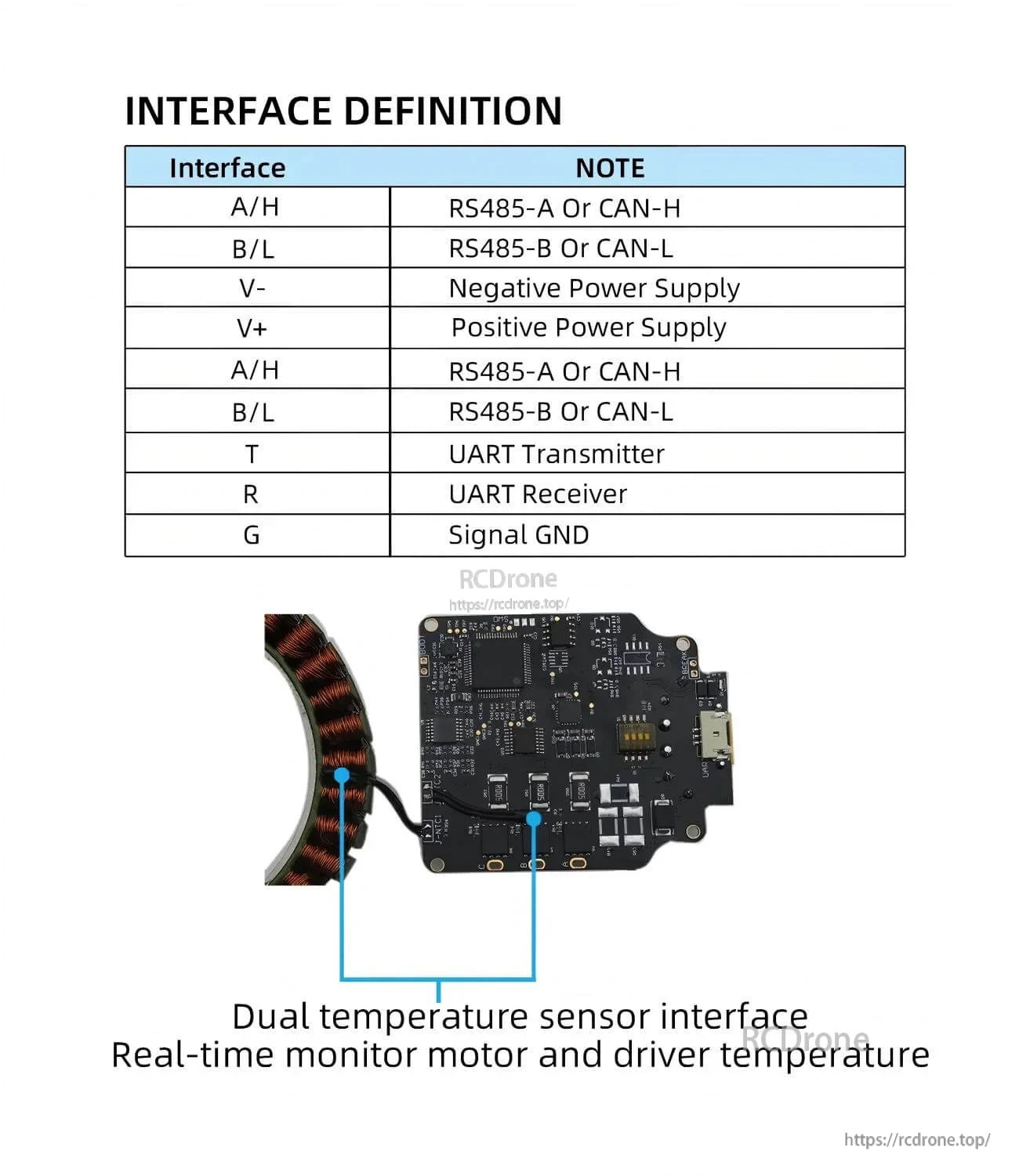
Klare Pin-Definitionen und duale Temperatursensor-Eingänge vereinfachen die Verkabelung und ermöglichen die Echtzeit-Überwachung der Motor-/Treiber-Temperatur.
 Geeignet für Plattformen wie AGVs, Roboterarme, Vierbeiner und tragbare Roboter, wo kompaktes Drehmoment benötigt wird.
Geeignet für Plattformen wie AGVs, Roboterarme, Vierbeiner und tragbare Roboter, wo kompaktes Drehmoment benötigt wird.
Related Collections




