




LKMTECH MG6012-i36-V3 Motor 24V/48V 25N.m 1:36 Planetengetriebe, RS485/CAN, 18bit Encoder
LKMTECH MG6012-i36-V3 Motor 24V/48V 25N.m 1:36 Planetengetriebe, RS485/CAN, 18bit Encoder
LKMTECH
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
LKMTECH MG6012-i36-V3 Motor ist ein leistungsstarkes bürstenloses Motor-Modul mit einem Planetengetriebe und Unterstützung für Encoder-/Antriebskommunikation für robotische Bewegungssysteme. Der Produktpositionierungstext umfasst: „Höchster Standard im Produktdesign“, „Hohe Ausgangsleistung“, „Hohes Ausgangsdrehmoment“ und „Hohe Präzision“.
Anwendungsszenarien
- Humanoide Roboter
- Roboterarme
- Exoskelette
- Quadruped-Roboter
- AGV-Fahrzeuge / AGV-Auto
- ARU-Roboter
- Roboterhund
- Tragbarer Roboter
Hauptmerkmale
- Hochleistungs-Brushless-Motor
- Hochpräziser Planetengetriebe
- Hochleistungs-FOC-Treiber (Textreferenz)
- Stromversorgungsspannung: 12-60V
- Kommunikation: CAN oder RS485
- Hauptsteuerung: 170M Hauptfrequenz mit 32-Bit ARM (Textreferenz)
- Encoder: 18-Bit-Einzelring-Absolute-Encoder / 18-Bit-Magnet-Encoder (beide angegeben)
- „Eine Kalibrierung, Nullposition niemals verlieren, kein Suchen nach dem Nullpunkt bei Stromausfall.” (angegeben)
- ID-Schalter (angegeben)
- Doppelsensor-Schnittstelle; Echtzeitüberwachung der Motor- und Treibertemperatur (angegeben)
Technische Daten
| Parameter | 24V-Version | 48V-Version |
|---|---|---|
| Artikelname | MG6012-i36-V3 | MG6012-i36-V3 |
| Nennspannung | 24V | 48V |
| Maximale Geschwindigkeit | 45U/min | 88U/min |
| Nennmoment | 25N.m | 25N.m |
| Nennspeed | 45U/min | 74U/min |
| Nennstrom | 4A | 4.8A |
| Maximale Leistung | 140W | 500W |
| Maximales Drehmoment | 40N.m | 40N.m |
| Geschwindigkeit konstant | 67rpm/V | 67rpm/V |
| Drehmoment konstant | 0.175N.m/A | 0.146N.m/A |
| Umdrehungen | 15 | 15 |
| Wicklungsart | Y | Y |
| Phasenwiderstand | 0.63Ω | 0.63Ω |
| Phaseninduktivität | 0.28mH | 0.28mH |
| Motorpolen | 28 | 28 |
| Rotormasse | 930 | 908 |
| Motortemperatur | JA | JA |
| Reduzierertyp | PG4136 | PG4136 |
| Übersetzungsverhältnis | 1:36 | 1:36 |
| Spiel | ≤12 Bogenminuten | ≤12 Bogenminuten |
| Lagerrated Belastung | 1770N | 1770N |
| Motorgewicht | 503g | 503g |
| Empfohlener Antrieb | DG60 | DG60 |
| Antriebseingangsspannung | 12-60V | 12-60V |
| Kommunikation | RS485 ODER CAN | RS485 ODER CAN | Kommunikationsfrequenz | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | 18-Bit Magnet-Encoder | 18-Bit Magnet-Encoder |
| Encoder Baudrate (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| Steuermodus | Drehmomentregelung(32KHz)/Geschwindigkeitsregelung(8KHz)/Positionsregelung(4KHz) | Drehmomentregelung(32KHz)/Geschwindigkeitsregelung(8KHz)/Positionsregelung(4KHz) |
| Beschleunigungskurve | Trapezförmige Beschleunigung | Trapezförmige Beschleunigung |
Schnittstellendefinition
CAN/RS485 und ID-Schalter sind vorhanden (angegeben). Schnittstellenhinweise:
| Schnittstelle | Hinweis |
|---|---|
| A/H | RS485-A oder CAN-H |
| B/L | RS485-B oder CAN-L |
| V- | Negative Stromversorgung |
| V+ | Positive Stromversorgung |
| T | UART-Transmitter |
| R | UART-Empfänger |
| G | Signal GND |
Handbücher / Dokumente
Für Integrationsfragen (CAN/RS485-Setup, Baudratenauswahl oder Controller-Paarung) kontaktieren Sie [email protected] or besuchen Sie https://rcdrone.top/.
Details

Der MG6012-i36-V3 integriert einen bürstenlosen Motor, planetarischen Reduzierer und Encoder-Kommunikation für Robotergelenke.
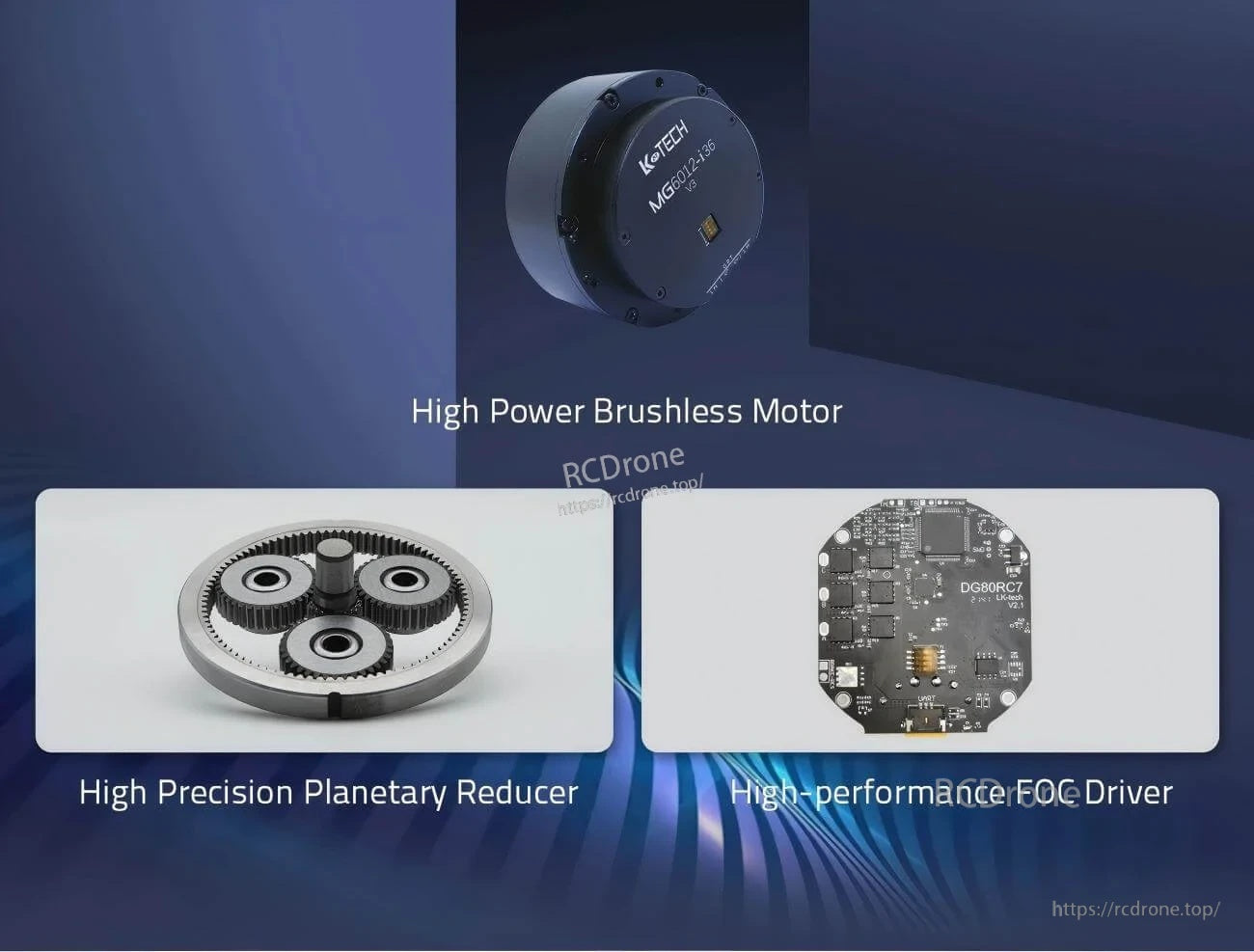
Ein kompaktes Antriebssystem, das um einen Hochleistungsmotor-Kern, präzise planetarische Reduktion und einen FOC-Treiber aufgebaut ist.
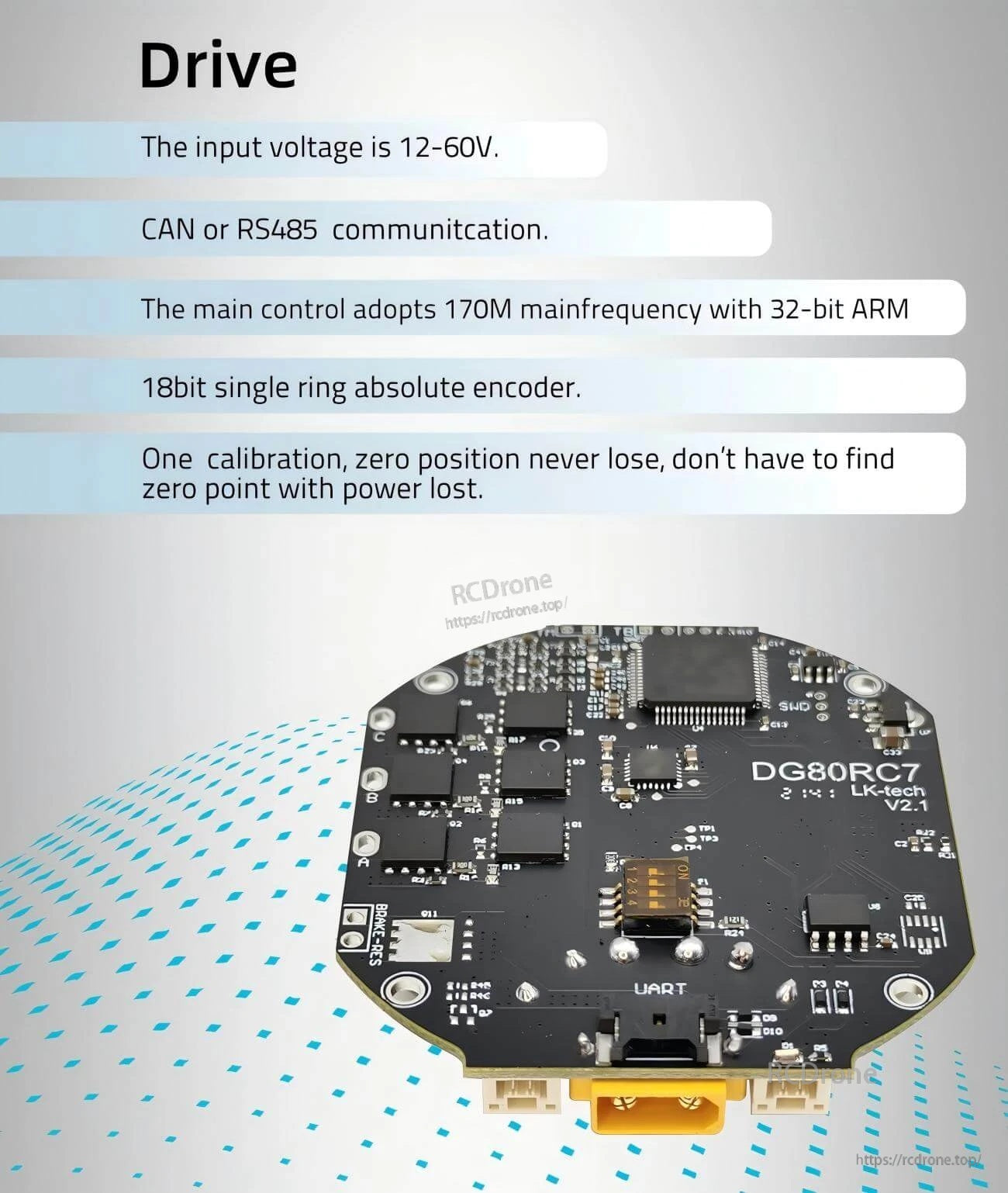
Die Steuerungselektronik unterstützt 12–60V Eingang mit CAN- oder RS485-Kommunikation sowie eine 18-Bit-Absolute-Encoder-Option.
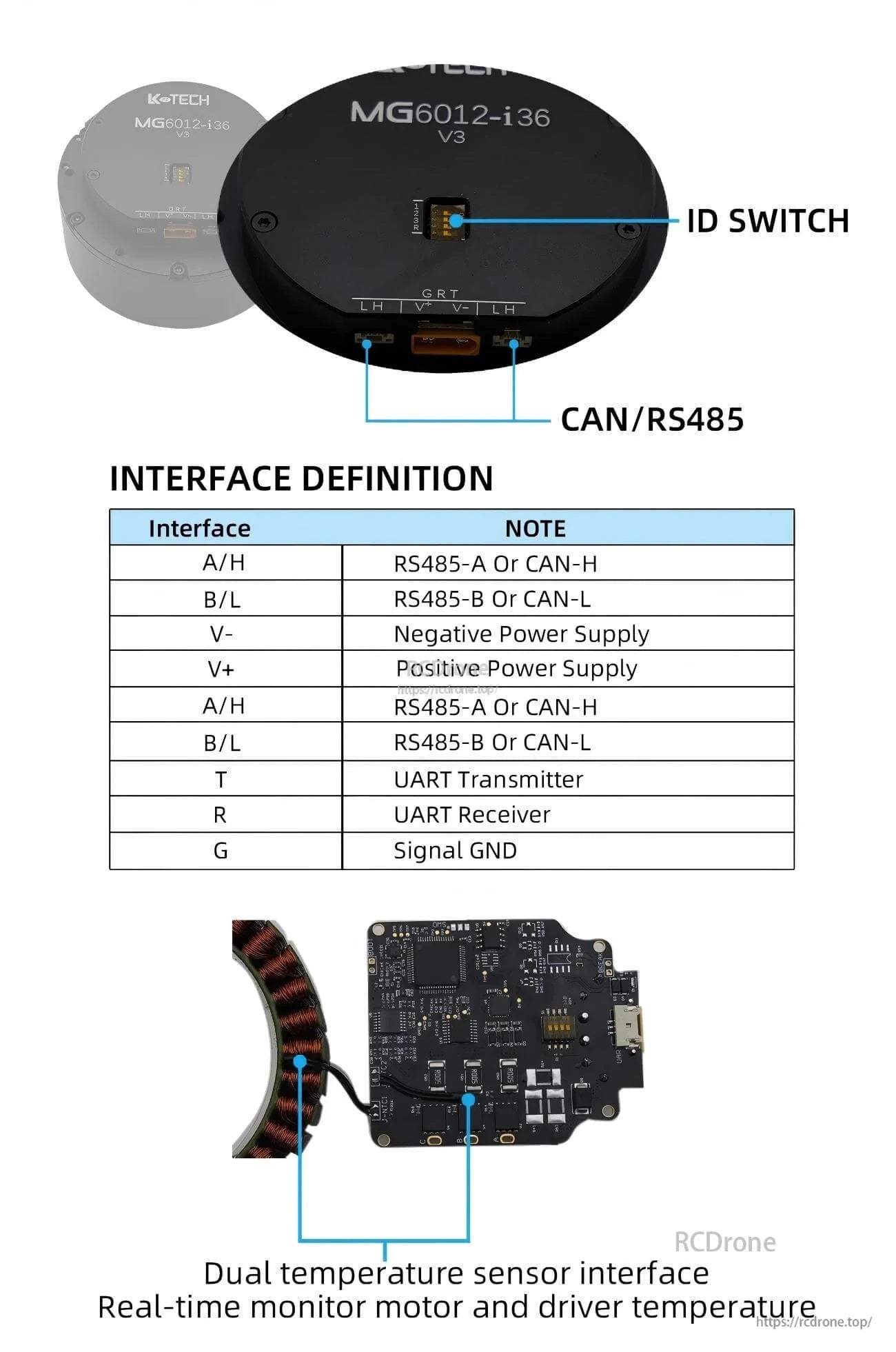
Klare Pin-Definitionen und ein integrierter ID-Schalter helfen, die Verkabelung und Multi-Node-CAN/RS485-Setups zu vereinfachen.

Der 1:36 planetarische Reduzierer ist für geringe Rückschläge und hohe Drehmomentausgänge in präzisen Bewegungsanordnungen ausgelegt.
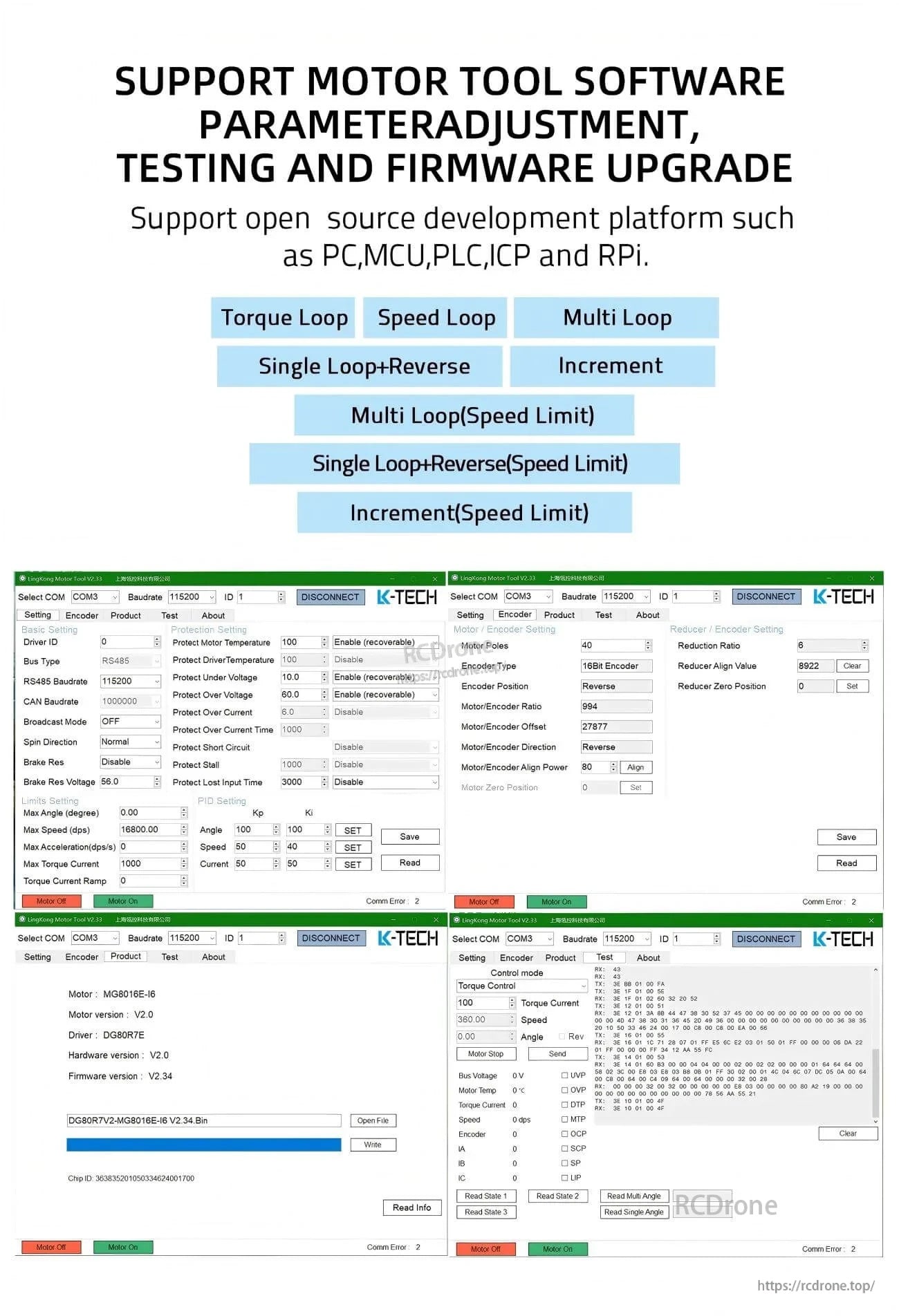
Die Konfigurationssoftware unterstützt die Parametrierung, das Testen von Regelmodus und Firmware-Updates auf gängigen Entwicklungsplattformen.
Geeignet für Robotikanwendungen wie AGVs, Roboterarme, Vierbeiner und tragbare/Exoskelett-Mechanismen.
Related Collections




