




LKMTECH MG8010-i36-V2 bürstenloser Motor mit 1:36 Planetengetriebe, 48V 800W, CAN/RS485, 18-Bit-Encoder
LKMTECH MG8010-i36-V2 bürstenloser Motor mit 1:36 Planetengetriebe, 48V 800W, CAN/RS485, 18-Bit-Encoder
LKMTECH
Normaler Preis
$677.00 USD
Normaler Preis
Verkaufspreis
$677.00 USD
Grundpreis
pro
Inkl. Steuern.
Versand wird beim Checkout berechnet
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Der LKMTECH MG8010-i36-V2 Motor ist ein bürstenloser Motor mit einem integrierten Planetengetriebe für die Robotik-Aktuation, der ein hohes Ausgangsdrehmoment und Präzision bietet. Kommunikationsoptionen umfassen CAN oder RS485, und er verwendet einen 18-Bit-Magnetencoder für das Feedback.
Hauptmerkmale
- Hohe Ausgangsleistung, großes Ausgangsdrehmoment, hohe Präzision
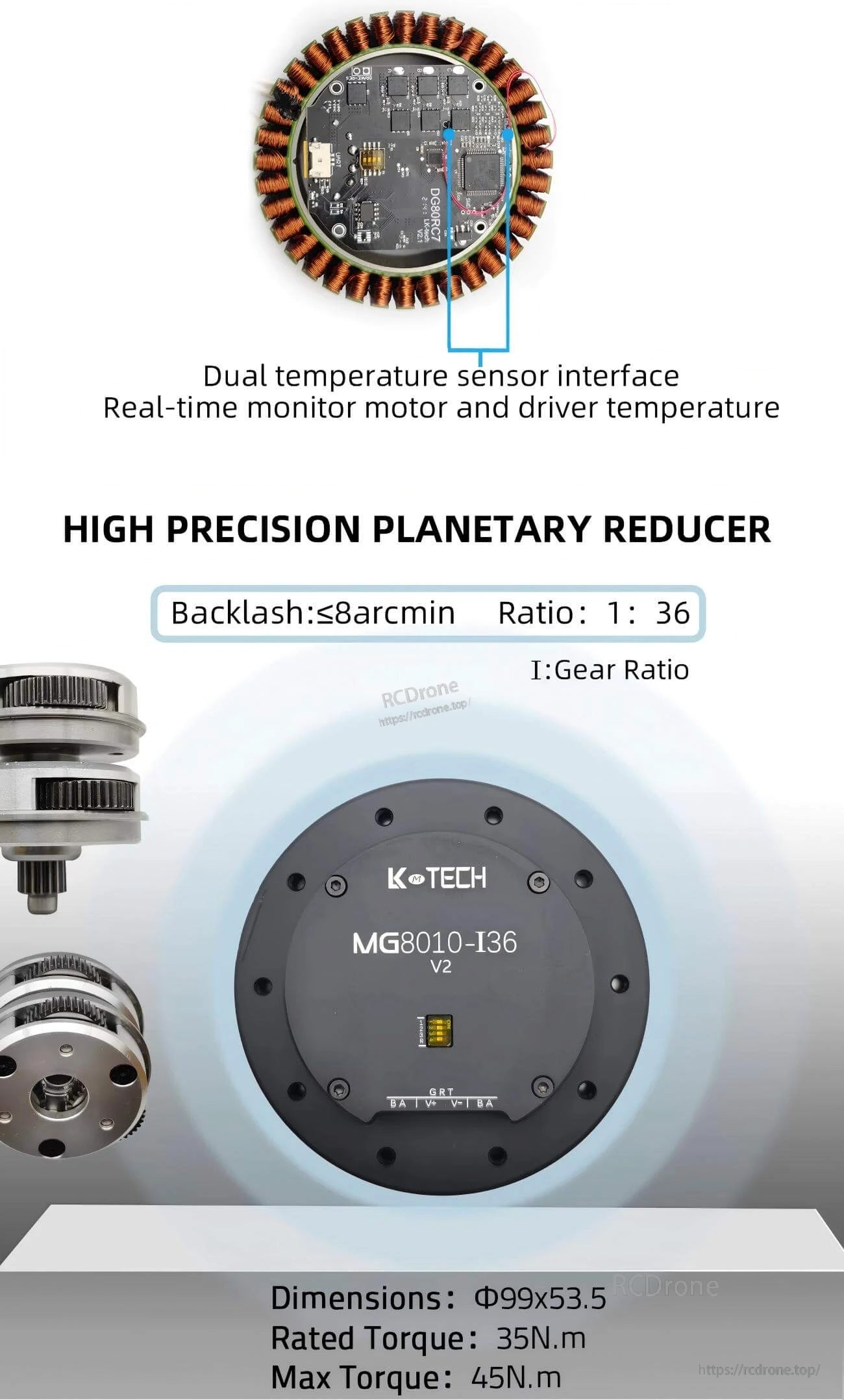
- Hochpräziser Planetengetriebe
- CAN- oder RS485-Kommunikation
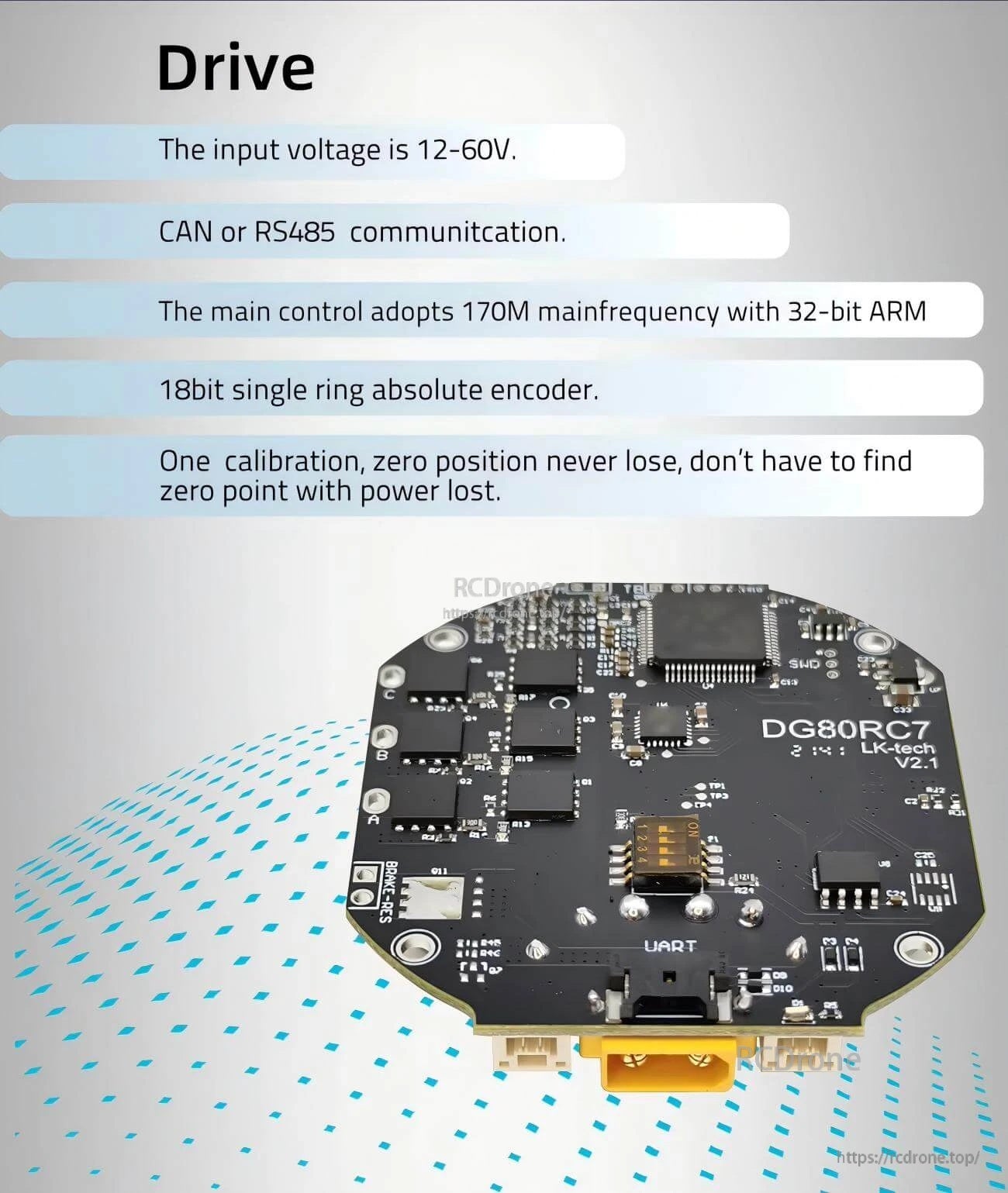
- 18-Bit-Einzelring-Absolute Encoder / 18-Bit-Magnetencoder
- Duale Temperatursensor-Schnittstelle zur Echtzeitüberwachung der Motor- und Treiber-Temperatur
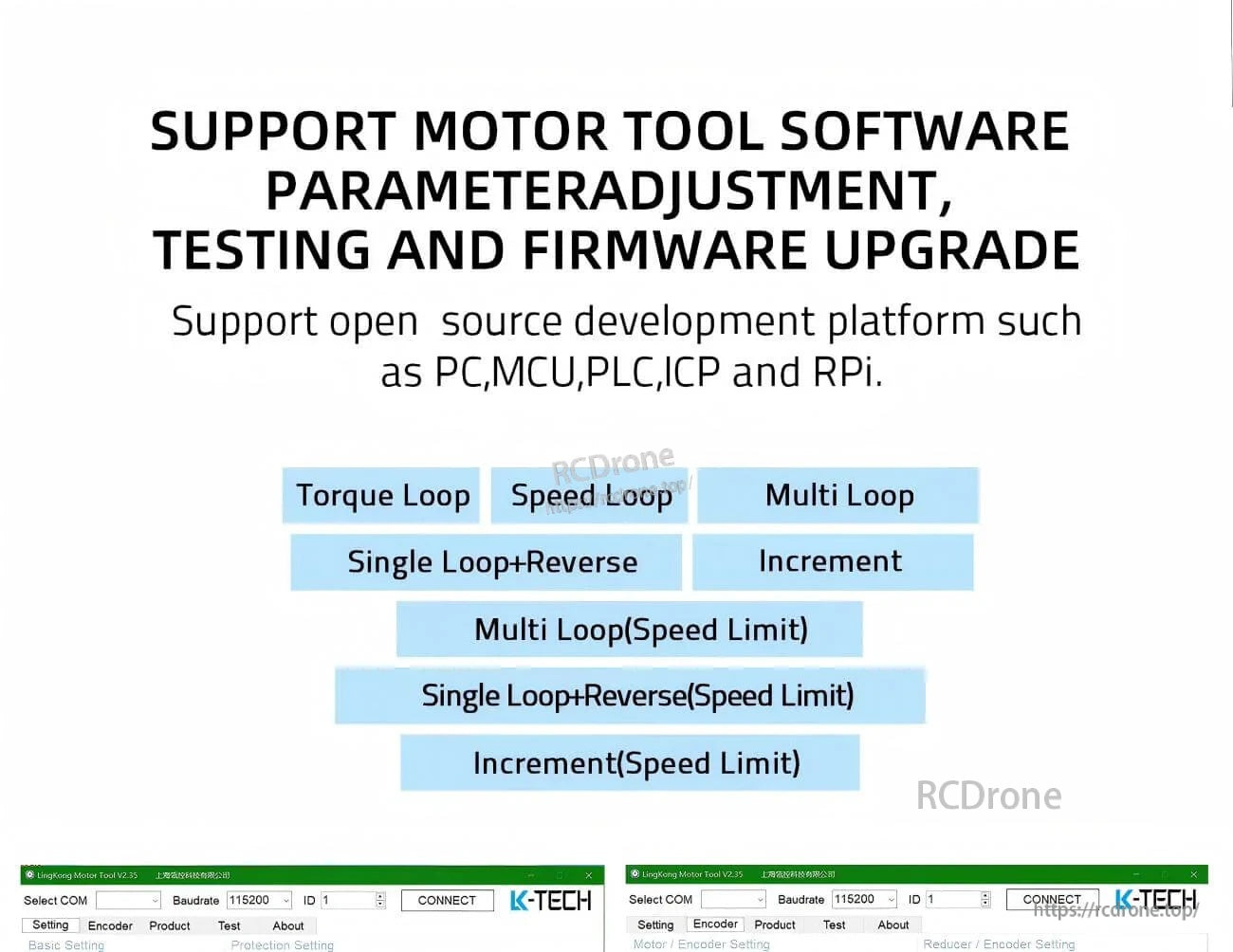
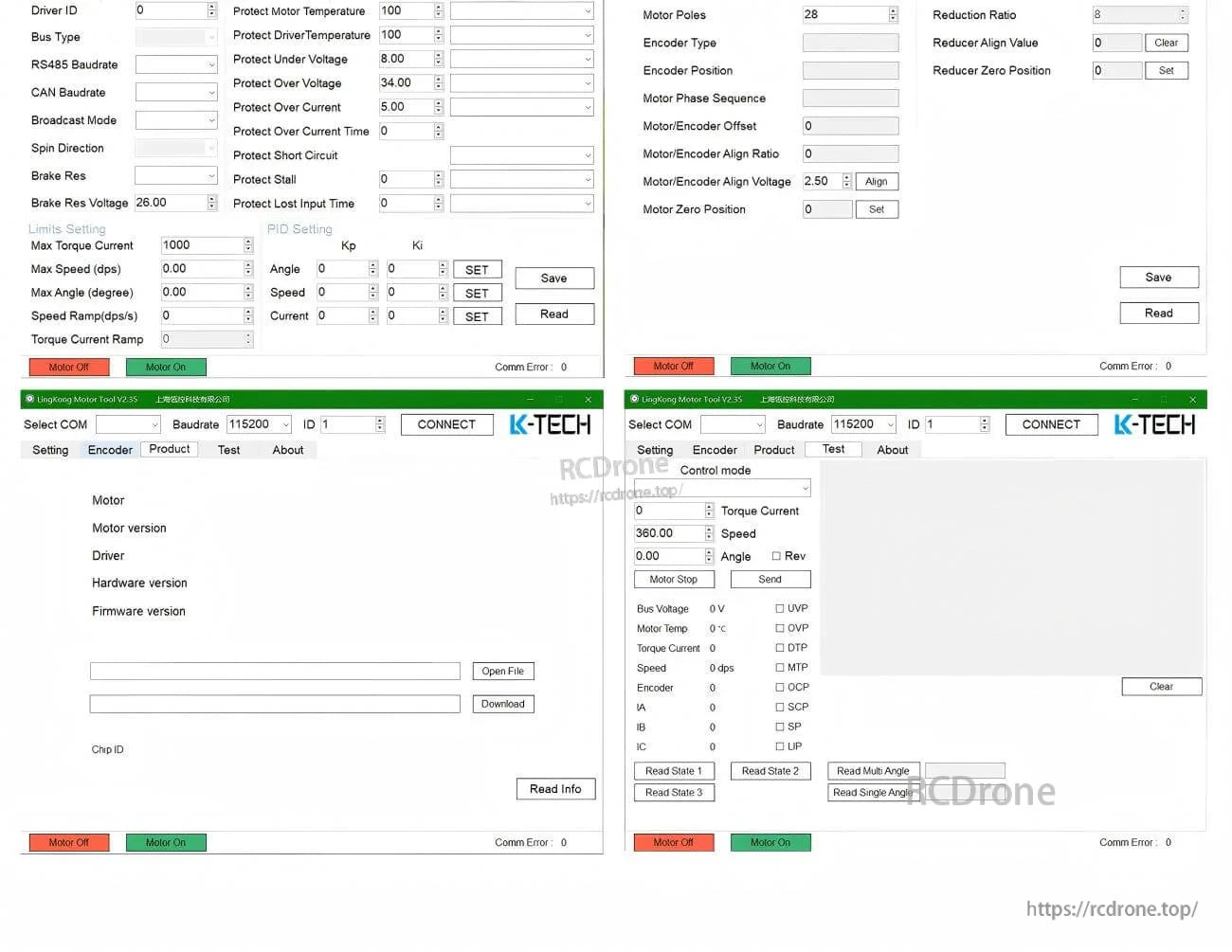
- Unterstützt Motorwerkzeugsoftware zur Parameteranpassung, Test und Firmware-Upgrade
- Unterstützt Open-Source-Entwicklungsplattformen wie PC, MCU, PLC, ICP und RPi
Technische Daten
| Artikelname | MG8010-i36v2 |
| Nennspannung | 48V |
| Maximale Geschwindigkeit | 80RPM |
| Nennspeed | 68RPM |
| Nennmoment | 35N.m |
| Maximales Drehmoment | 45N.m |
| Bewerteter Strom | 6.9A |
| Maximale Leistung | 800W |
| Geschwindigkeit konstant | 51rpm/V |
| Drehmomentkonstante | 0.15N.m/A |
| Umdrehungen | 17 |
| Wicklungstyp | Delta (Δ) |
| Phasenwiderstand | 0.27Ω |
| Phaseninduktivität | 0.23mH |
| Motorpolzahlen | 40 |
| Rotormasse | 2670gcm² |
| Motortemperatur | JA |
| Reduzierertyp | PG5536 |
| Übersetzungsverhältnis | 1:36 |
| Spiel | ≤8 Bogenminuten |
| Lagerrated Belastung | 1770N |
| Motorgewicht | 860g |
| Abmessungen | Φ99 x 53.5 |
| Empfohlene Antrieb | DG60 |
| Eingangsspannung des Antriebs | 12-60V |
| Kommunikation | RS485 oder CAN |
| Kommunikationsfrequenz | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) |
| Encoder | 18-Bit Magnet-Encoder |
| Encoder Baudrate (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate (CAN) | 1M |
| Steuermodus | Drehmomentregelung (32KHz) / Geschwindigkeitsregelung (8KHz) / Positionsregelung (4KHz) |
| Beschleunigungskurve | Trapezförmige Beschleunigung |
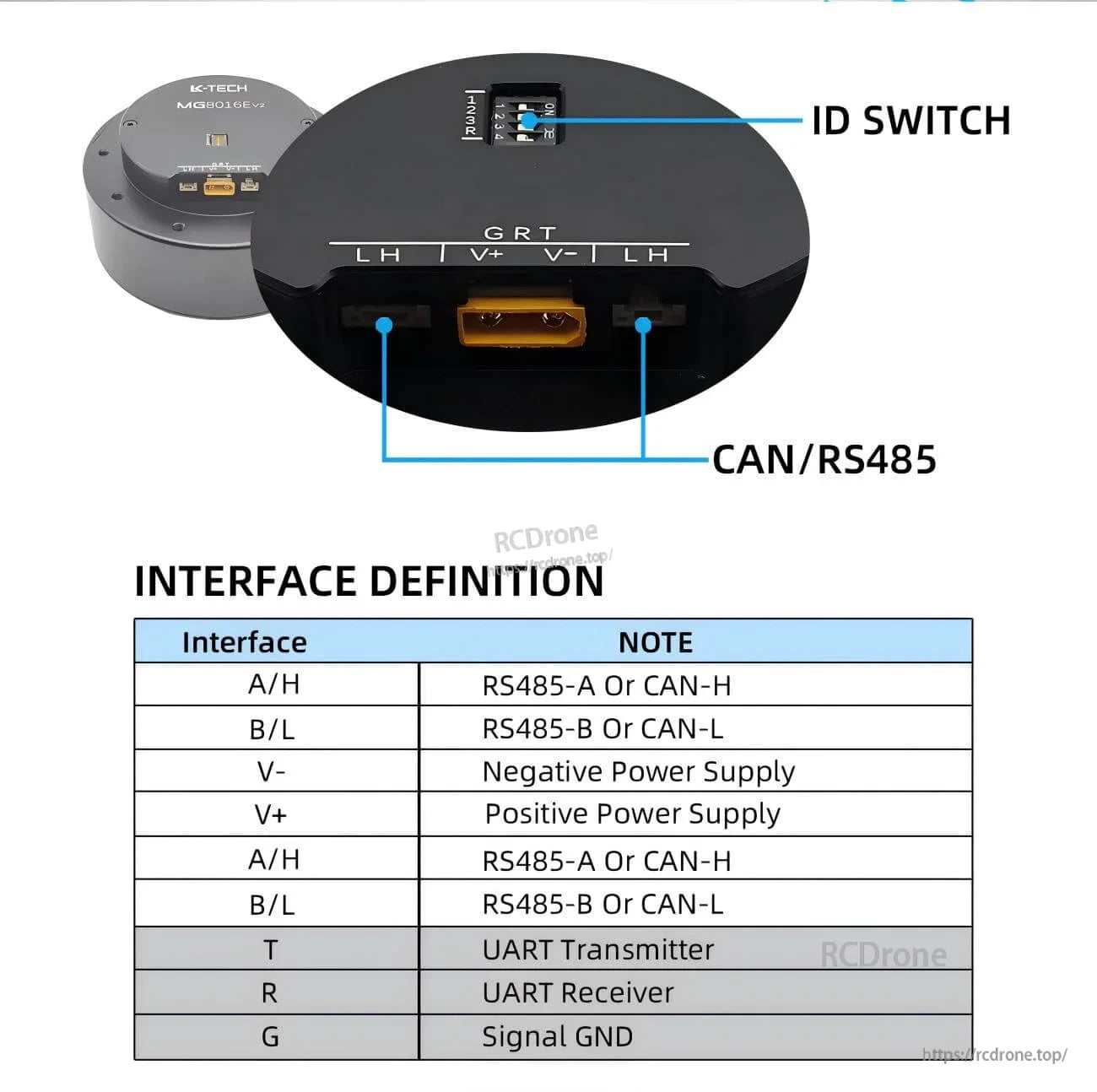
Schnittstellendefinition
- ID-Schalter: 1, 2, 3, 4 (EIN)
- Schnittstellenmarkierung: GRT / LH / V+ / V- / LH
| Benutzeroberfläche | Hinweis |
|---|---|
| A/H | RS485-A oder CAN-H |
| B/L | RS485-B oder CAN-L |
| V- | Negative Stromversorgung |
| V+ | Positive Stromversorgung |
| T | UART-Sender |
| R | UART-Empfänger |
| G | Signal GND |
Anwendungen
- Humanoide Roboter
- Roboterarme
- Exoskelette / tragbare Roboter
- Quadruped-Roboter (Roboterhund)
- AGV-Fahrzeuge (AGV-Auto)
- ARU-Roboter
Handbücher / Dokumente
Für Verkabelung, Antriebswahl und Integrationsunterstützung (CAN/RS485) kontaktieren Sie https://rcdrone.top/ oder senden Sie eine E-Mail an [email protected] .
Details



Related Collections




