




MagicLab P110 Motor 360 N·m Spitzendrehmoment, Dual-Encoder, CAN/EtherCAT Gelenkantrieb für humanoide Roboter
MagicLab P110 Motor 360 N·m Spitzendrehmoment, Dual-Encoder, CAN/EtherCAT Gelenkantrieb für humanoide Roboter
MagicLab
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
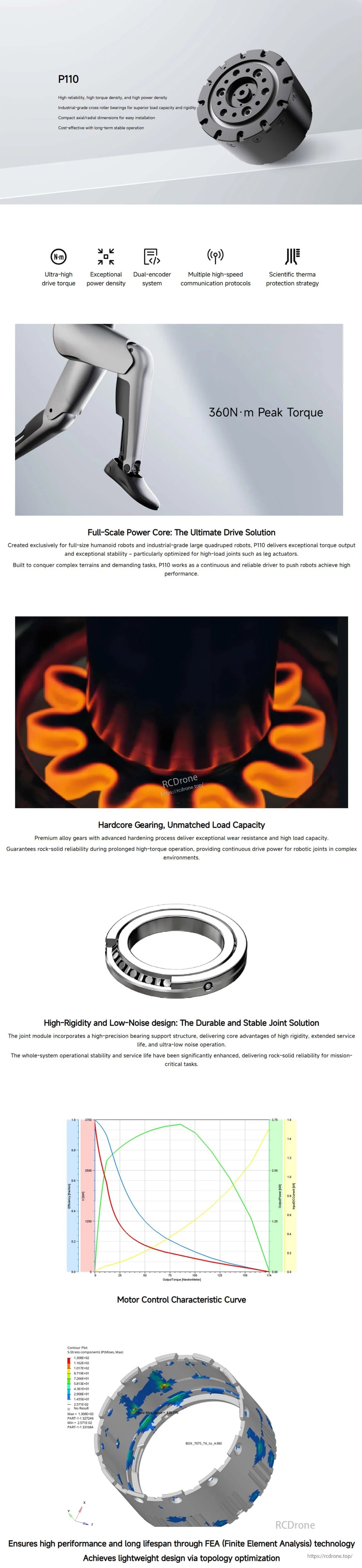
Der MagicLab P110 Motor ist ein Hochdrehmoment-Gelenkantriebsmotor, der für robotische Gelenke entwickelt wurde und ein Dual-Encoder-System sowie Hochgeschwindigkeitskommunikationsoptionen (CAN / EtherCAT) bietet. Er ist für Hochlastgelenke wie Beinaktoren in vollwertigen humanoiden Robotern und industriellen Groß-Quadruped-Robotern positioniert.
Hauptmerkmale
- 360 N·m Spitzenmoment
- Ultra-hohes Antriebsmoment und außergewöhnliche Leistungsdichte
- Duale Encoder-System (Motor-Encoder-Auflösung: 15 Bit)
- Kommunikationsschnittstelle: CAN / EtherCAT (mehrere Hochgeschwindigkeitskommunikationsprotokolle)
- Wissenschaftliche thermische Schutzstrategie
- Robuste Getriebe für Tragfähigkeit (Premium-Legierungszahnräder mit fortschrittlichem Härtungsprozess)
- Hochsteifes, geräuscharmes Design mit einer hochpräzisen Lagerunterstützungsstruktur
- FEA (Finite-Elemente-Analyse) Technologie für hohe Leistung und lange Lebensdauer; leichtes Design bei gleichzeitiger Beibehaltung der Festigkeit
Anwendungen
- Humanoide Roboter
- Roboterarme
- Exoskelette
- Quadruped-Roboter
- AGV-Fahrzeuge
- ARU-Roboter
Technische Daten
| Maximale Geschwindigkeit | 20 U/min (24V Stromversorgung) |
| Modulgewicht | 1900g |
| Nennmoment | 90 N·m |
| Spitzenmoment | 360 N·m |
| Abmessungen | Φ112*71.5 |
| Betriebsspannung | 48V - 54V |
| Spitzenstrom | 137 A |
| Kommunikationsschnittstelle | CAN / EtherCAT |
| Encoder-Konfiguration | Doppel-Encoder |
| Motor-Encoder-Auflösung | 15 Bit |
| Steuerfrequenz | 25.000 Hz |
| Empfohlene Betriebsumgebung | -5°C ~ 40°C |
Für Integrations-, Schnittstellen- oder Konfigurationsfragen kontaktieren Sie [email protected] or besuchen Sie https://rcdrone.top/.
Details
Entwickelt für hochbelastbare humanoide und vierbeinige Gelenke, kombiniert das MagicLab P110 360 N·m Spitzenmoment mit Doppel-Encoder-Feedback und CAN/EtherCAT-Kommunikation für präzise, reaktionsschnelle Betätigung.
Related Collections




