MATEK M10-L4-3100 GPS-Modul – Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
MATEK M10-L4-3100 GPS-Modul – Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
MATEKSYS
Verfügbarkeit für Abholungen konnte nicht geladen werden
MATEK M10-L4-3100 – Mateksys AP_PERIPH GNSS-SPEZIFIKATIONEN
Verwendung: Fahrzeuge und ferngesteuerte Spielzeuge
Alter empfehlen: 12+J,14+J,6-12J
Herkunft: Festlandchina
Material: Verbundmaterial
Markenname: MATEKSYS
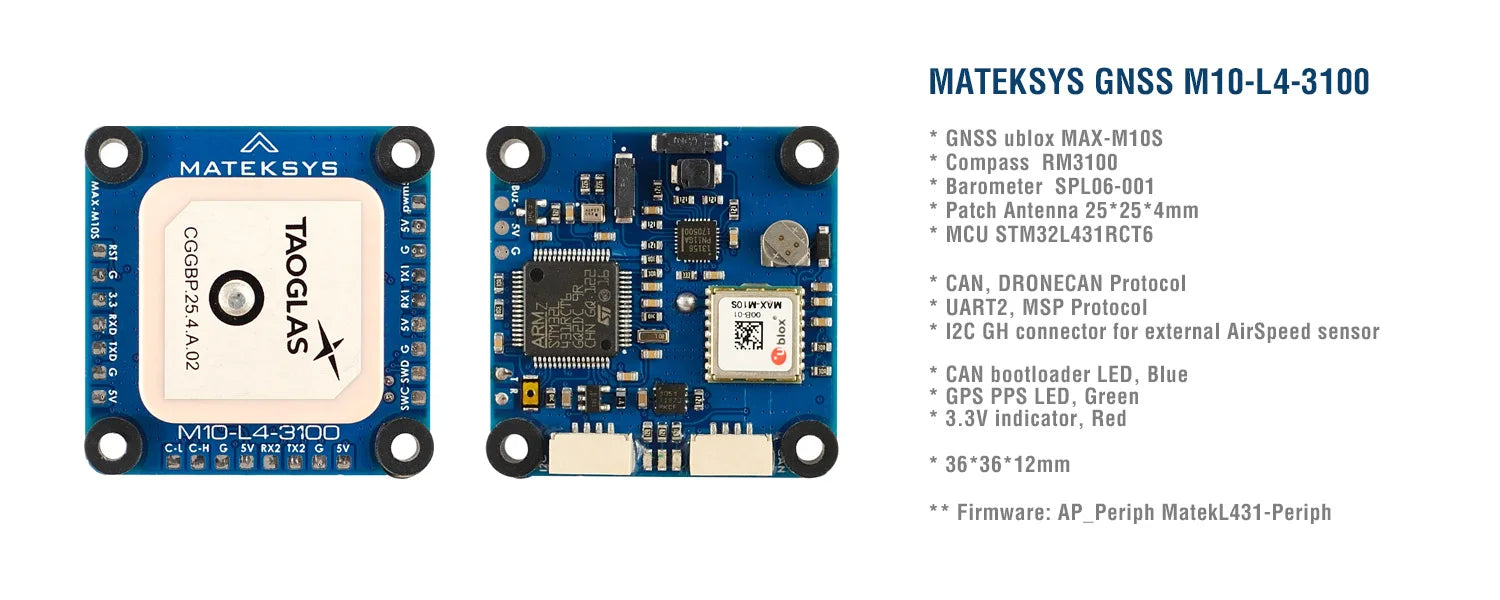
AP_PERIPH GNSS M10-L4-3100
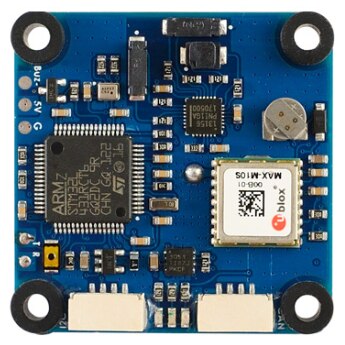
AP_Periph L431 CAN-Knoten, MAX-M10S, RM3100, SPL06-001, DroneCAN-Protokoll und UART_MSP
-
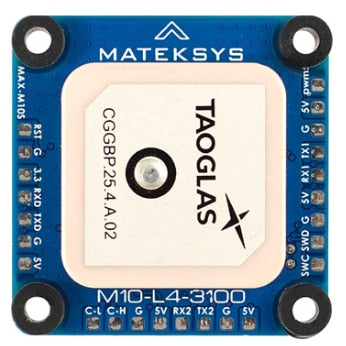
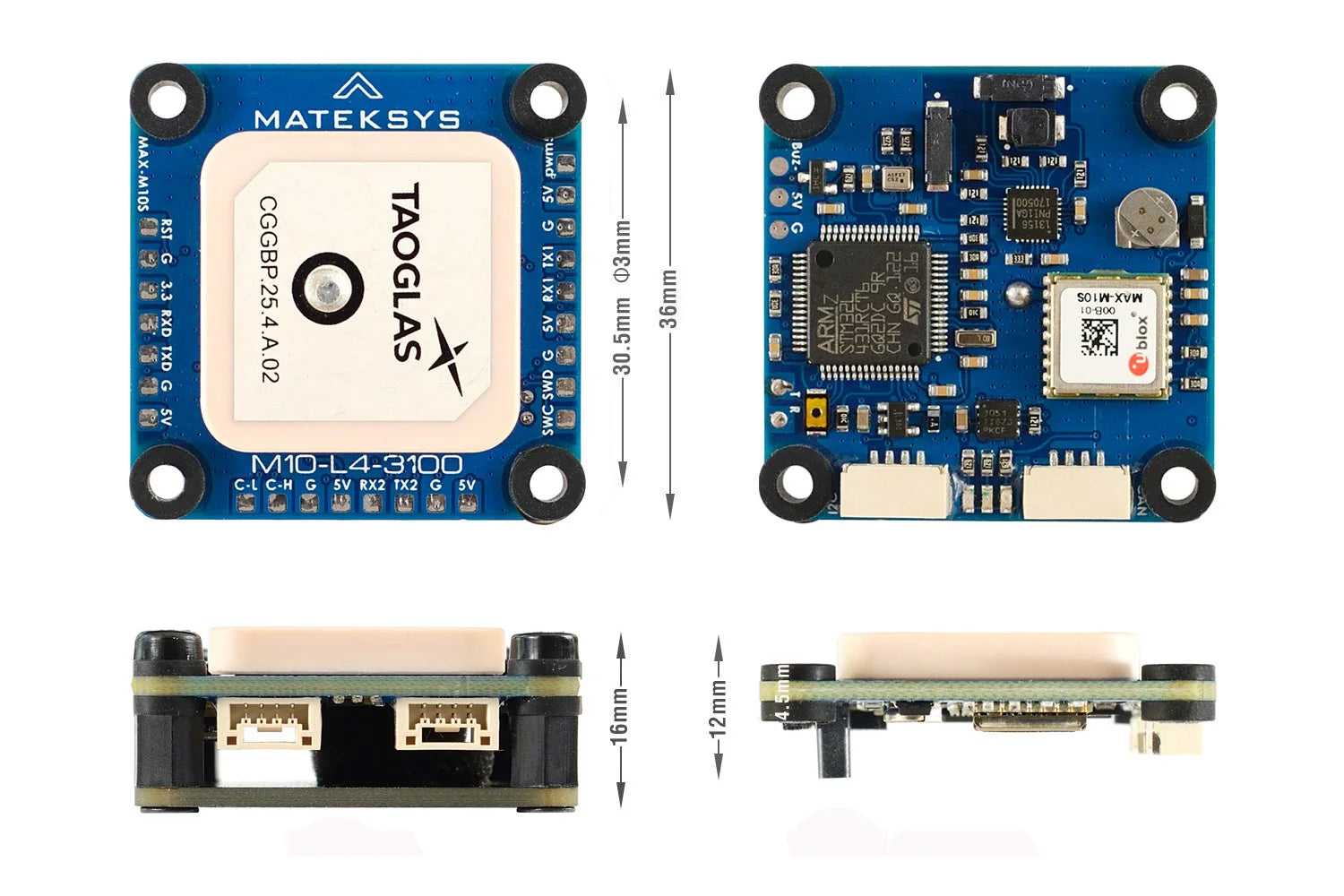
M10-L4-3100 basiert auf der AP_Periph-Firmware von ArudPilots. Es handelt sich um ein GNSS+COMPASS+BAROMETER-Peripheriegerät mit CAN/DroneCAN- und UART/MSP-Schnittstellen.
-
M10-L4-3100 nutzt Multikonstellations-GNSS mit u-blox MAX-M10S. MAX-M10S ist ein gleichzeitiger GNSS-Empfänger, der mehrere GNSS-Systeme empfangen und verfolgen kann. Dank der Multiband-RF-Frontend-Architektur können alle vier großen GNSS-Konstellationen GPS, Galileo, GLONASS und BeiDou gleichzeitig empfangen werden.
-
M10-L4-3100 integriert einen industrietauglichen Kompass PNI RM3100, der eine hohe Auflösung, geringen Stromverbrauch, keine Hysterese, einen großen Dynamikbereich und hohe Abtastraten bietet.

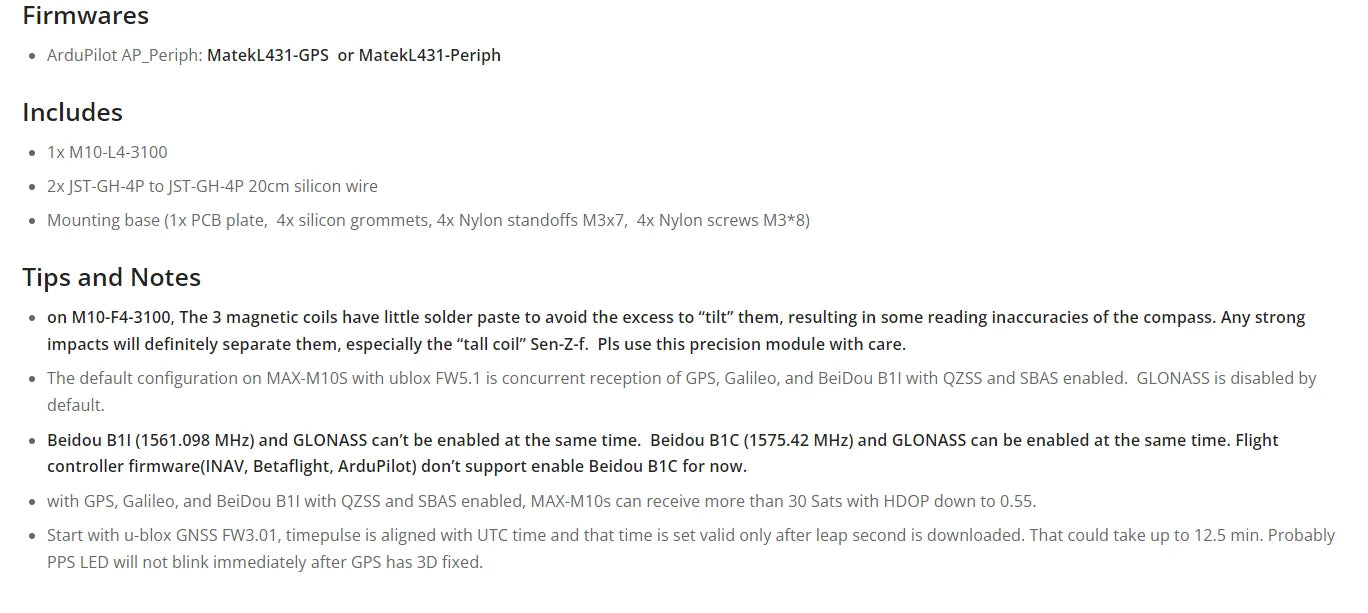
die Standardkonfiguration auf MAX-M1OS mit ublox FWS . ist der gleichzeitige Empfang von GPS, Galileo und BeiDou BI mit aktiviertem QZSS und SBAS. GLONASS ist standardmäßig deaktiviert, Beidou B1I (1575,42 MHz) und kann nicht gleichzeitig aktiviert werden.
CAN (UAVCAN-Protokoll) Verbindung
-
M10-L4-3100 5V — FC 4,5 V ~ 5.3V
-
M10-L4-3100 CAN-H – FC CAN High
-
M10-L4-3100 CAN-L — FC CAN Low
-
M10-L4-3100 G — FC G/GND
FC UAVCAN-Parameter (ArduPilot)
-
CAN_D1_PROTOCOL -> 1
-
CAN_P1_DRIVER -> 1
-
GPS_TYPE -> 9 (DroneCAN)
-
COMPASS_TYPEMASK -> 0 (stellen Sie sicher, dass DroneCAN deaktiviert ist)
————————————————————————–
Wenn Sie den I2C-Fluggeschwindigkeitssensor an den I2C-Port von M10-L4-3100 anschließen
-
ARSPD_TYPE -> 8 (UAVCAN)
-
ARSPD_USE -> 1
Und Sie müssen CAN-Knotenparameter für den Fluggeschwindigkeitssensor festlegen, der an den I2C-Port von M10-L4-3100 angeschlossen ist
Missionsplaner > Ersteinrichtung > Optionale Hardware > UAVCAN > SLCan-Modus CAN1 > Parameter
-
MS4525 ARSP_TYPE -> 1 (Standard in hwdef)
-
MS5525 ARSP_TYPE -> 3 unterstützt MS5525 nur mit Adresse 0x77
-
SDP3X ARSP_TYPE -> 6
-
DLVR-L10D ARSP_TYPE -> 9
-
Schreiben und neu starten
———————————————————————–
Wenn Sie 2812LED DIN an das PWM5-Pad anschließen
-
NTF_LED_TYPES -> (Stellen Sie sicher, dass DroneCAN aktiviert ist)
SLCan-Modus CAN1 > Parameter
-
OUT5_FUNCTION 120
-
NTF_LED_TYPES 455
-
AP_Periph FW muss „MatekL431-Periph“ sein. Die MSP-Funktion ist in „MatekL431-GPS“ deaktiviert.
UART (MSP-Protokoll) Verbindung
-
M10-L4-3100 5V — FC 4,0V ~ 5,3V
-
M10-L4-3100 TX2 – FC-Ersatz UART_RX
-
M10-L4-3100 RX2 – FC-Ersatz-UART_TX (nicht unbedingt erforderlich)
-
M10-L4-3100 G — FC G/GND
ArduPilot (seit 4.1.x) FC-Parameter
-
Serialx_PROTOCOL = 32 (MSP), wobei x der SERIAL-Port ist, der für die Verbindung zum Autopiloten verwendet wird.
-
Serialx_BAUD = 115 wobei x der SERIAL-Port ist, der für die Verbindung zum Autopiloten verwendet wird.
-
GPS-TYP = 19 (MSP)
-
BARO_PROBE_EXT = 4096 (MSP Baro)
-
BARO_PRIMARY = 1 (Wenn Sie MSP-Baro als primäres Baro verwenden möchten, belassen Sie es andernfalls als Standard)
-
COMPASS_TYPEMASK 0 (oder stellen Sie sicher, dass das MSP-Bit nicht aktiviert ist)
INAV (seit 2.6) FC-Parameter
-
M10-L4-3100 ist mit jedem von INAV unterstützten Flugcontroller über einen Ersatz-UART kompatibel.
-
Aktivieren Sie auf der Registerkarte „Ports“ MSP auf dem entsprechenden UART, mit dem M10-L4-3100 verbunden ist. Aktivieren Sie „GPS“ NICHT auf diesem UART. select Baudrate 115200.
-
Funktion GPS
-
set gps_provider = MSP
-
set mag_hardware = MSP
-
set baro_hardware = MSP
-
set align_mag = CW90, wenn der Kompass flach montiert ist und der Pfeil nach vorne zeigt, und der Pfeil des Flugcontrollers ebenfalls nach vorne zeigt.
Related Collections