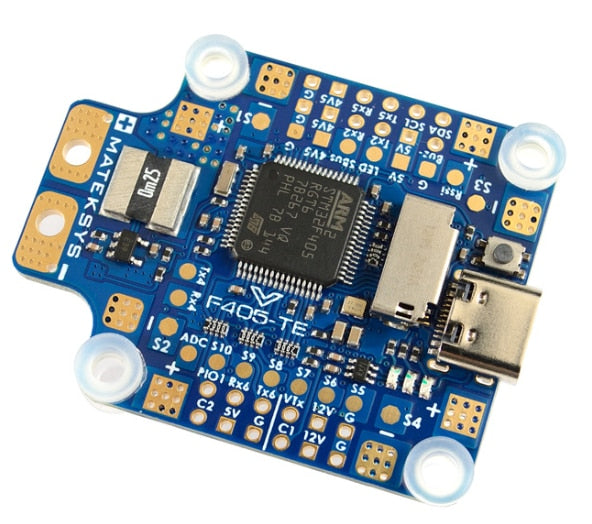
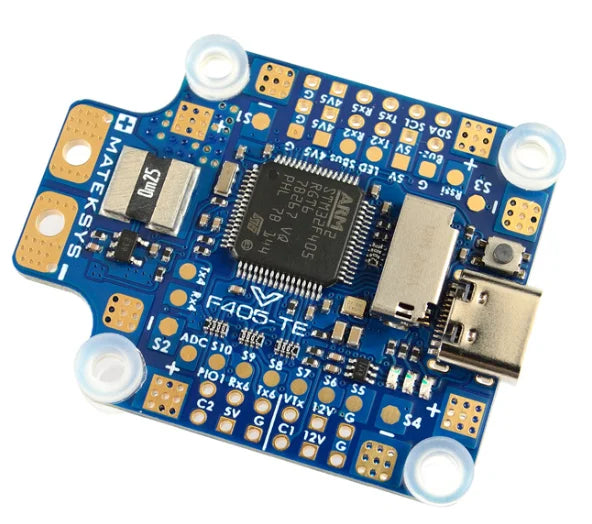
MATEK F405-TE – Mateksys FLUGCONTROLLER
MATEK F405-TE – Mateksys FLUGCONTROLLER
MATEKSYS
Verfügbarkeit für Abholungen konnte nicht geladen werden
MATEK F405-TE – Mateksys FLIGHT CONTROLLER SPEZIFIKATIONEN
Verwendung: Fahrzeuge und ferngesteuerte Spielzeuge
Alter empfehlen: 12+J,14+J
Herkunft: Festlandchina
Material: Verbundmaterial
Markenname: MATEKSYS
Spezifikationen
-
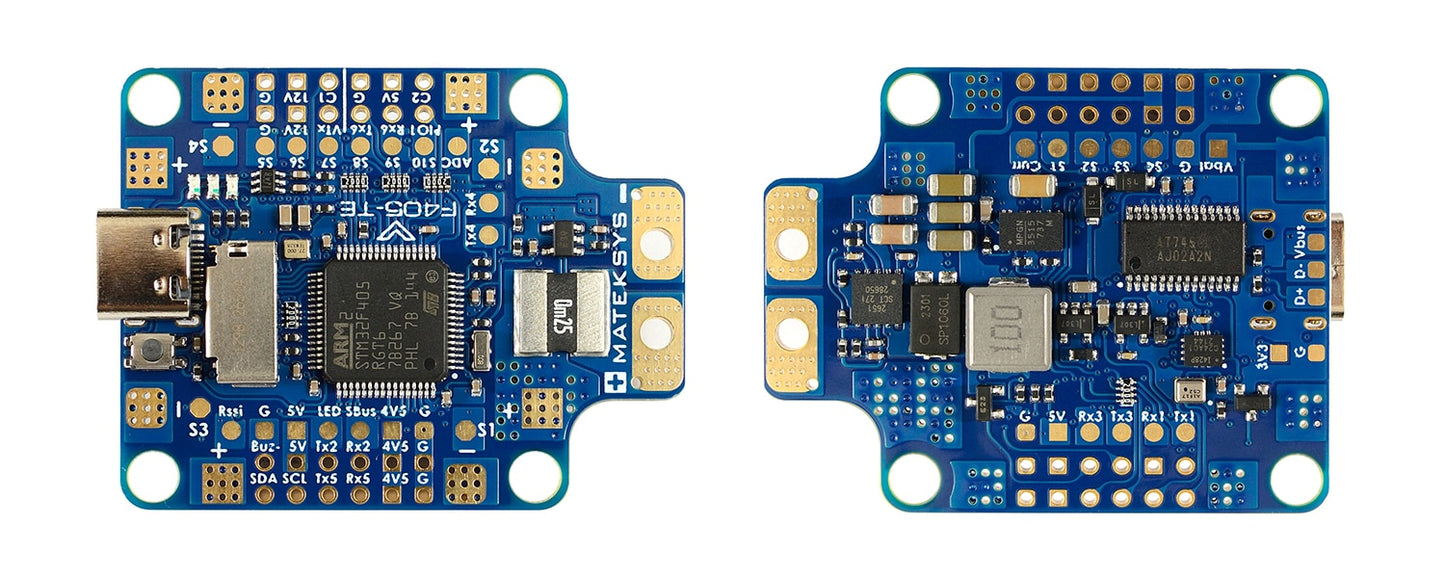
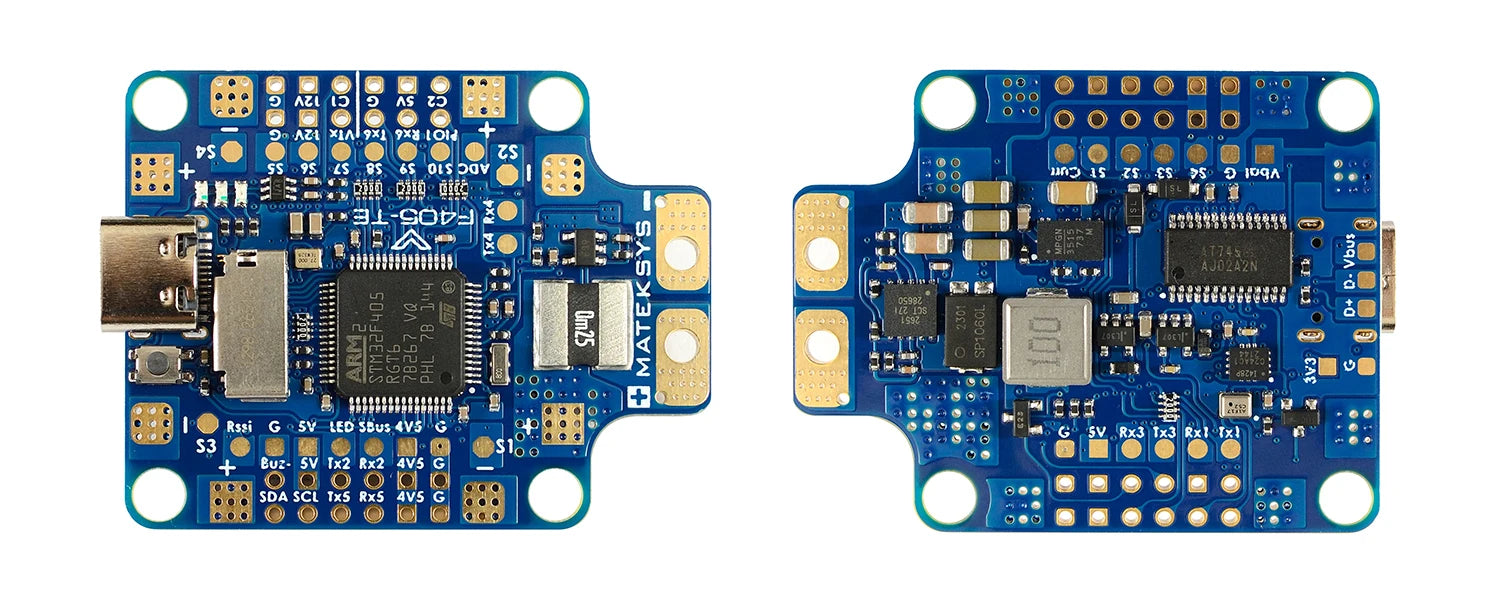
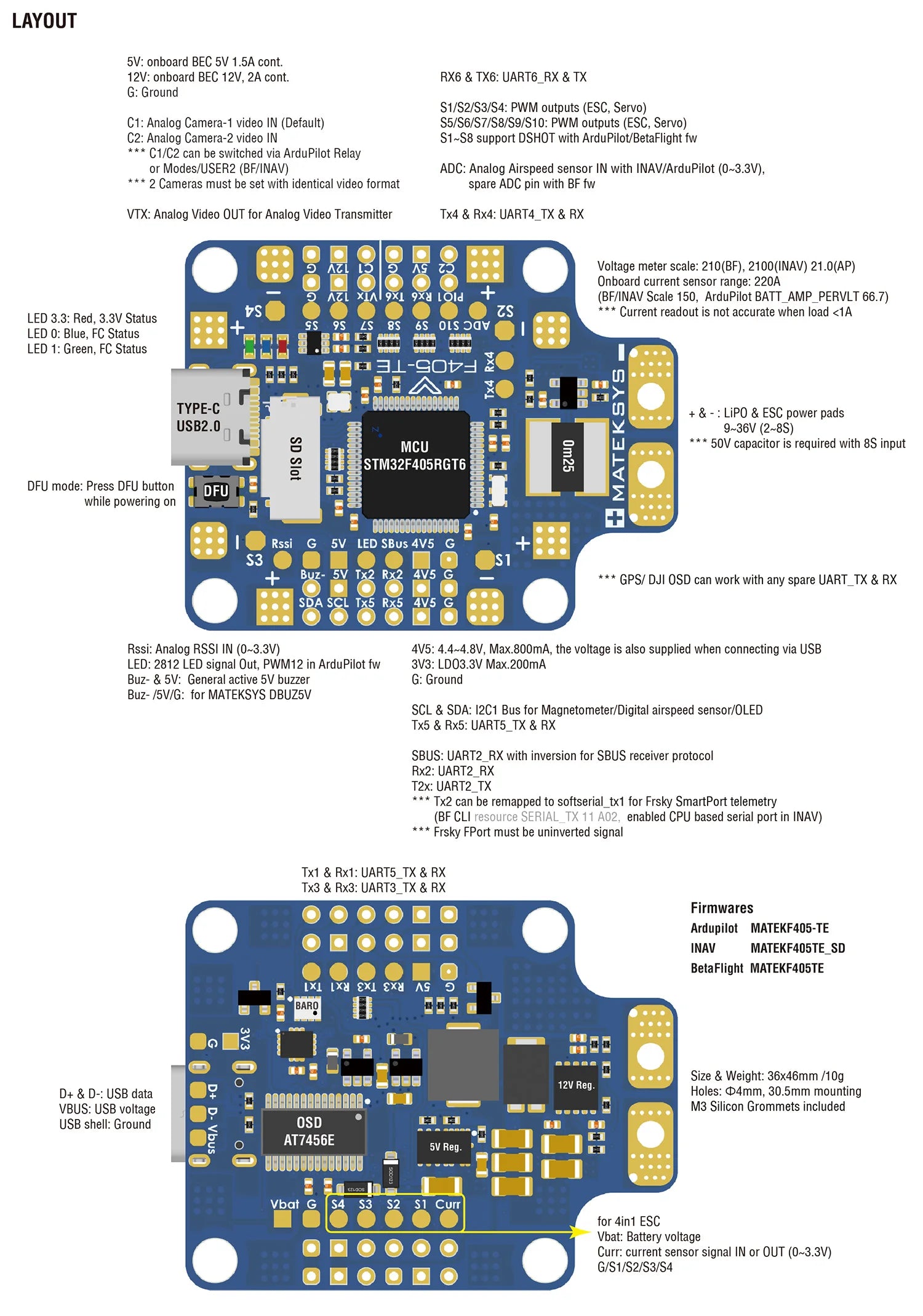
MCU: 168 MHz STM32F405RGT6
-
IMU: ICM42688-P (SPI)
-
Baro: SPL06-001 (I2C)
-
OSD: AT7456E (SPI)
-
Blackbox: MicroSD-Steckplatz (SPI)
-
6x UARTs, 1x Softserial_Tx-Option (INAV/BF)
-
11x PWM-Ausgänge (8x Dshot kompatibel mit BF/ArduPilot)
-
1x I2C
-
4x ADC (VBAT, Strom, RSSI, Fluggeschwindigkeit)
-
1x Ersatz-PINIO
-
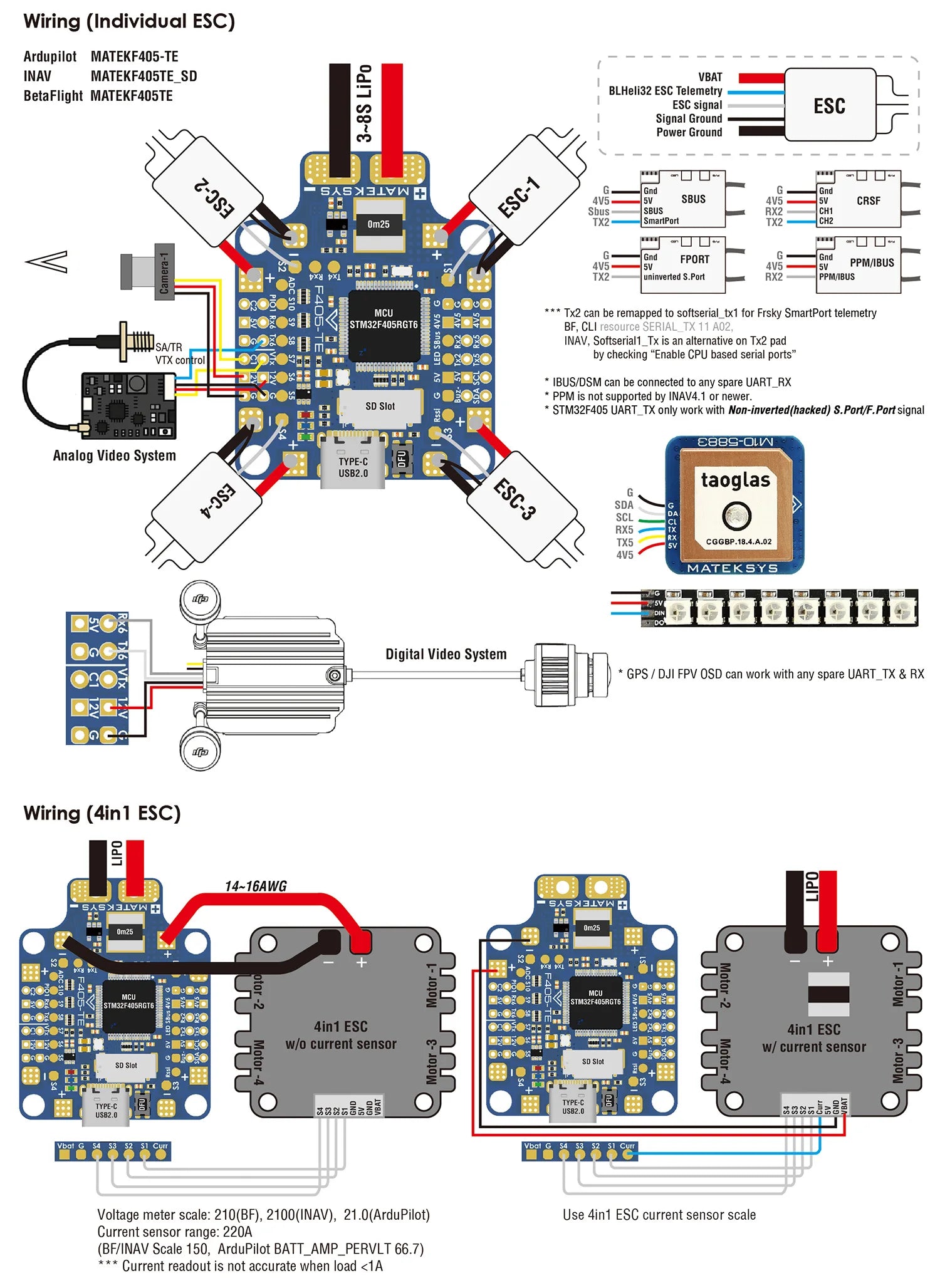
4x einzelne ESC-Strom-/Signalpads
-
1x Gruppe von G/S1/S2/S3/S4-Pads für 4-in-1-ESC-Signal/GND
-
Eingebauter Wechselrichter auf UART2-RX für SBUS-Eingang
-
Umschaltbarer Dual-Kamera-Eingang
PDB-Spezifikationen
-
Eingang: 9~36V (3~8S LiPo)
-
PDB: 4x 35A (Max. 4x 50A)
-
BEC: 5V 1,5A
-
BEC: 12V 2A
-
LDO 3,3 V: 200 mA
-
Stromsensor: 220 A, 3,3 V ADC (INAV/BF-Skala 150, ArduPilot 66,7 A/V)
-
Batteriespannungsteiler 1K:20K (INAV-Skala 2100, BF-Skala 210, ArduPilot BATT_VOLT_MULT 21.0)
Firmware
-
ArduPilot: MatekF405-TE
-
INAV: MATEKF405TE_SD
-
BetaFlight: MATEKF405TE
Physisch
-
Montage: 30,5 x 30,5 mm, Φ4 mm mit Ösen Φ3 mm
-
Abmessungen: 36 x 46 mm
-
Gewicht: 10g
Einschließlich
-
1x F405-TE
-
6x Silikontüllen M4 bis M3
-
1x Rubycon ZLH 35V/470uF (Niedriger ESR)
TIPPS
INAV, DSHOT kann aufgrund eines DMA-Konflikts nicht auf S3, S5, S7 funktionieren. Bitte verwenden Sie ONESHOT oder MULTISHOT und kalibrieren Sie den ESC-PWM-Bereich.
BetaFlight, dshot_bitbang = ON setzen, wenn X6 und X8 DSHOT verwendet werden.
ArduPilot, setzen Sie LOG_BACKEND_TYPE = 1 (Datei) für die SD-Kartenprotokollierung
Related Collections