MATEK F405-WTE – Mateksys FLUGCONTROLLER
MATEK F405-WTE – Mateksys FLUGCONTROLLER
MATEKSYS
Verfügbarkeit für Abholungen konnte nicht geladen werden
MATEK F405-WTE – Mateksys FLIGHT CONTROLLER SPEZIFIKATIONEN
Verwendung: Fahrzeuge und ferngesteuerte Spielzeuge
Alter empfehlen: 12+J,14+J
Herkunft: Festlandchina
Material: Verbundmaterial
Markenname: MATEKSYS
FLUGCONTROLLER F405-WTE
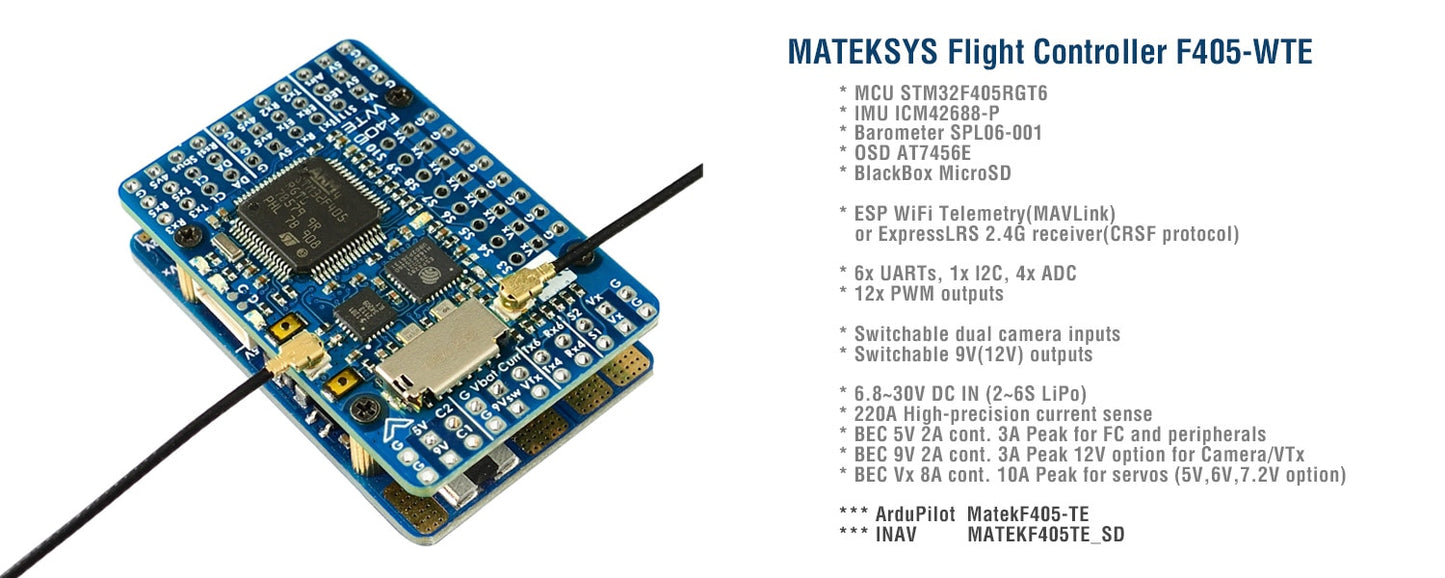
STM32F405RGT6, ICM42688P, SPL06, OSD, ESP WIFI-Telemetrie/ELRS 2,4G-Empfänger, 6xUARTs, 12x PWM, 1xI2C
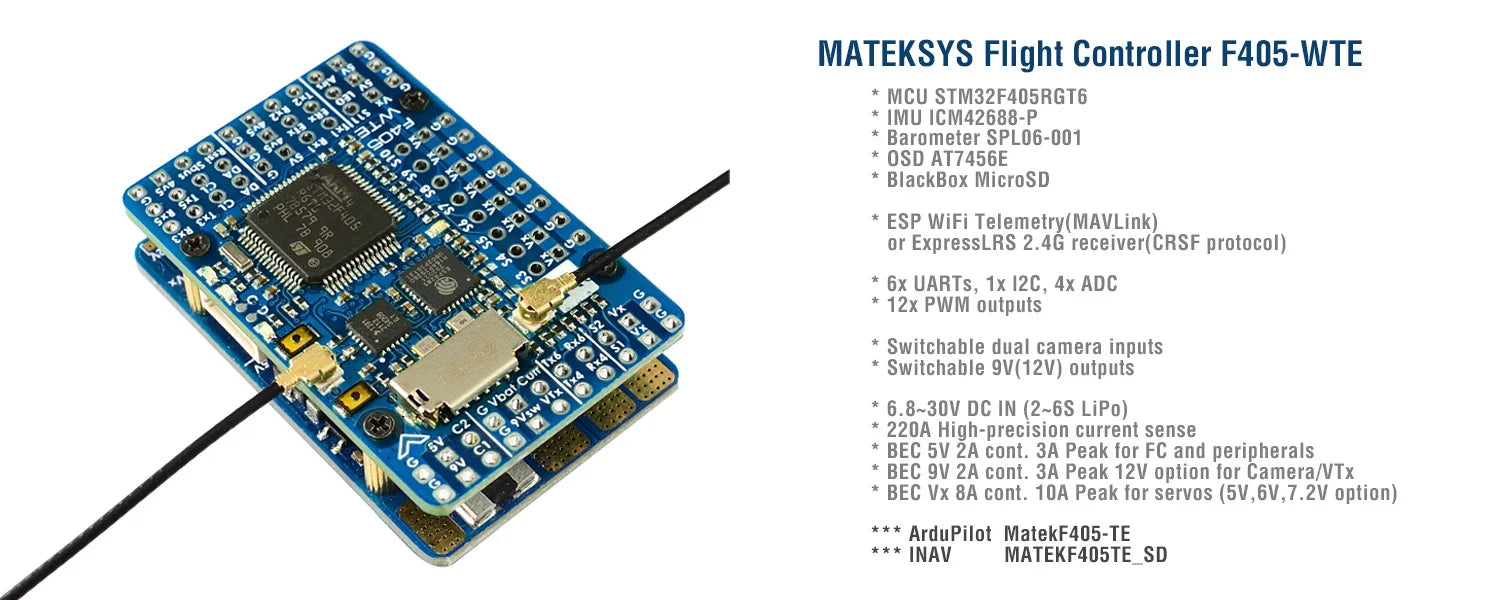
MATEKSYS Flight Controller F4O5-WTE MCU STM3ZFAOSRGT6 IMU ICM42688-P Barometer SPLO6-001 OSD AT7456E BlackBox MicroSD 2 8 2 2 2 ESP WiFi Telemetrie (MAVLink) 2 oder ExpressLRS 2.4G Empfänger (CRSF-Protokoll) 6x UARTs, Ix I2C, 4x ADC 85 12x PWM-Ausgänge Umschaltbare Dual-Kameraeingänge 4+

FC-Spezifikationen
-
MCU: STM32F405RGT6, 168 MHz, 1 MB Flash
-
IMU: ICM42688-P
-
Baro: SPL06-001
-
OSD: AT7456E
-
Blackbox: MicroSD-Kartensteckplatz
-
ESP WiFi Telemetrie (MAVLink, 14 dBm)
-
ExpressLRS 2.4G-Empfänger (CRSF-Protokoll, Telemetrie 12 dBm)
-
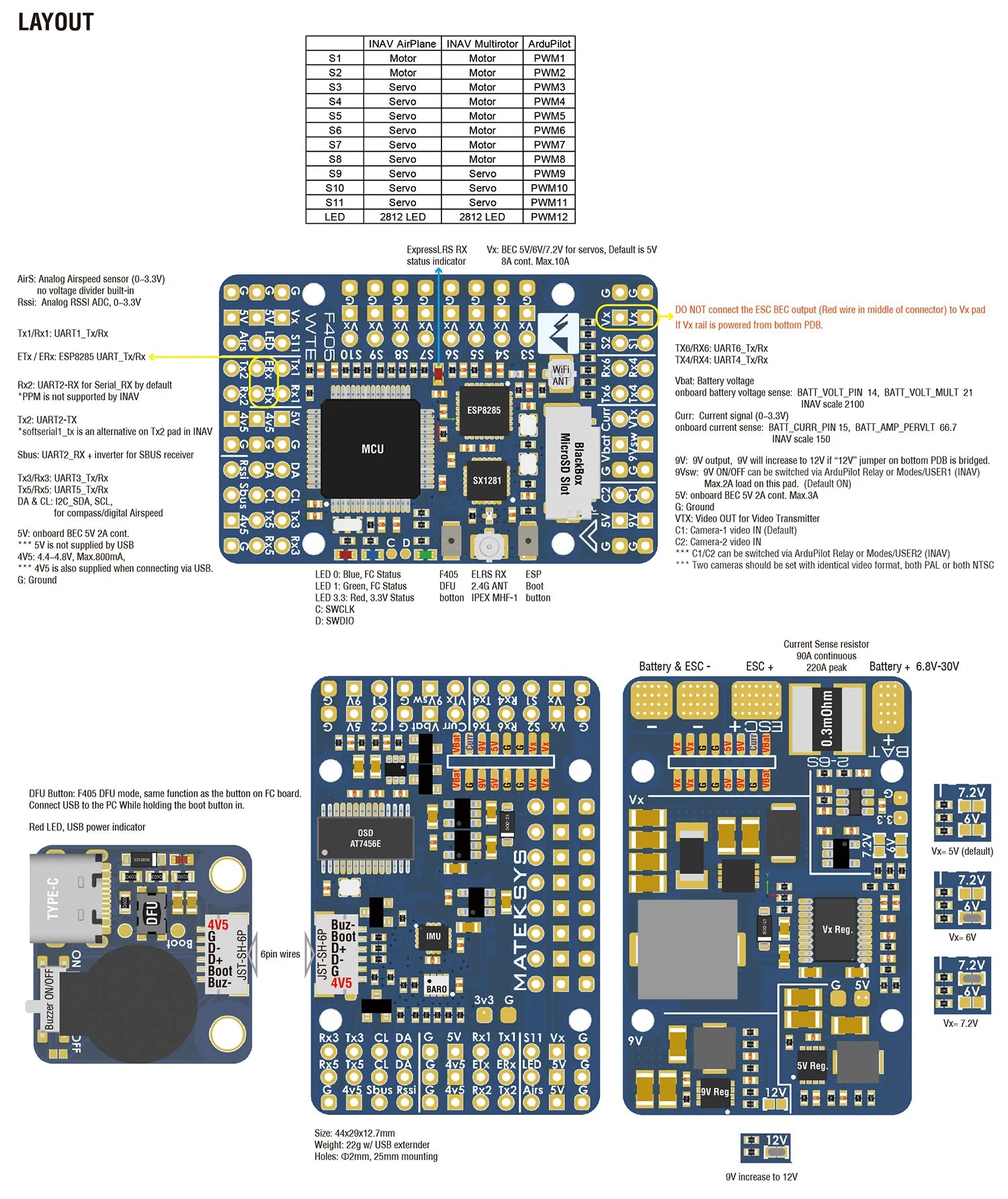
6x UARTs, 1x Softserial_Tx-Option (INAV)
-
12x PWM-Ausgänge
-
1x I2C
-
4x ADC (VBAT, Strom, RSSI, Fluggeschwindigkeit)
-
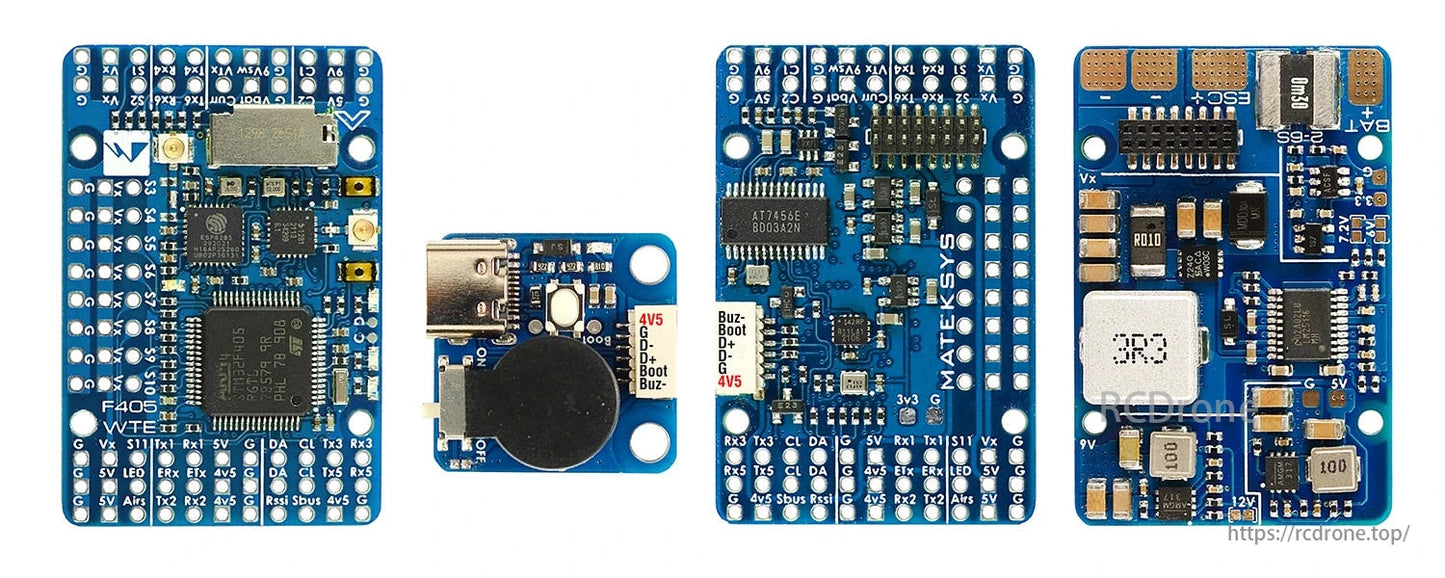
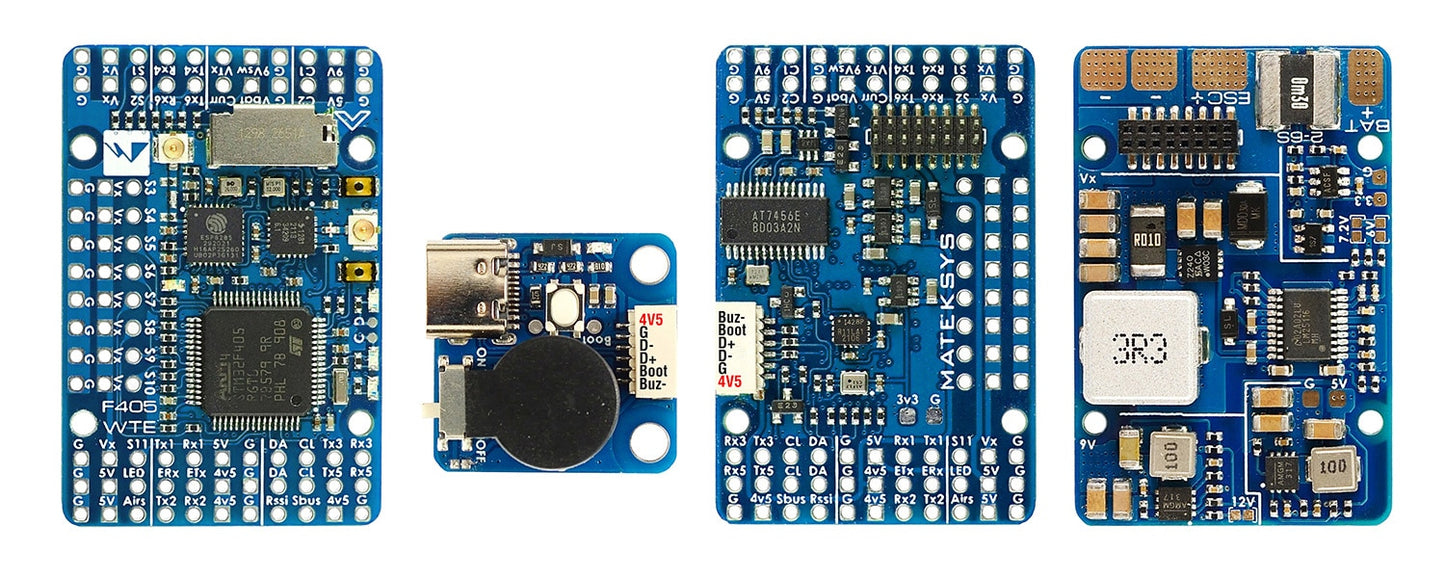
USB/Beep Extender mit Typ-C (USB2.0)
-
Schalter für zwei Kameraeingänge
-
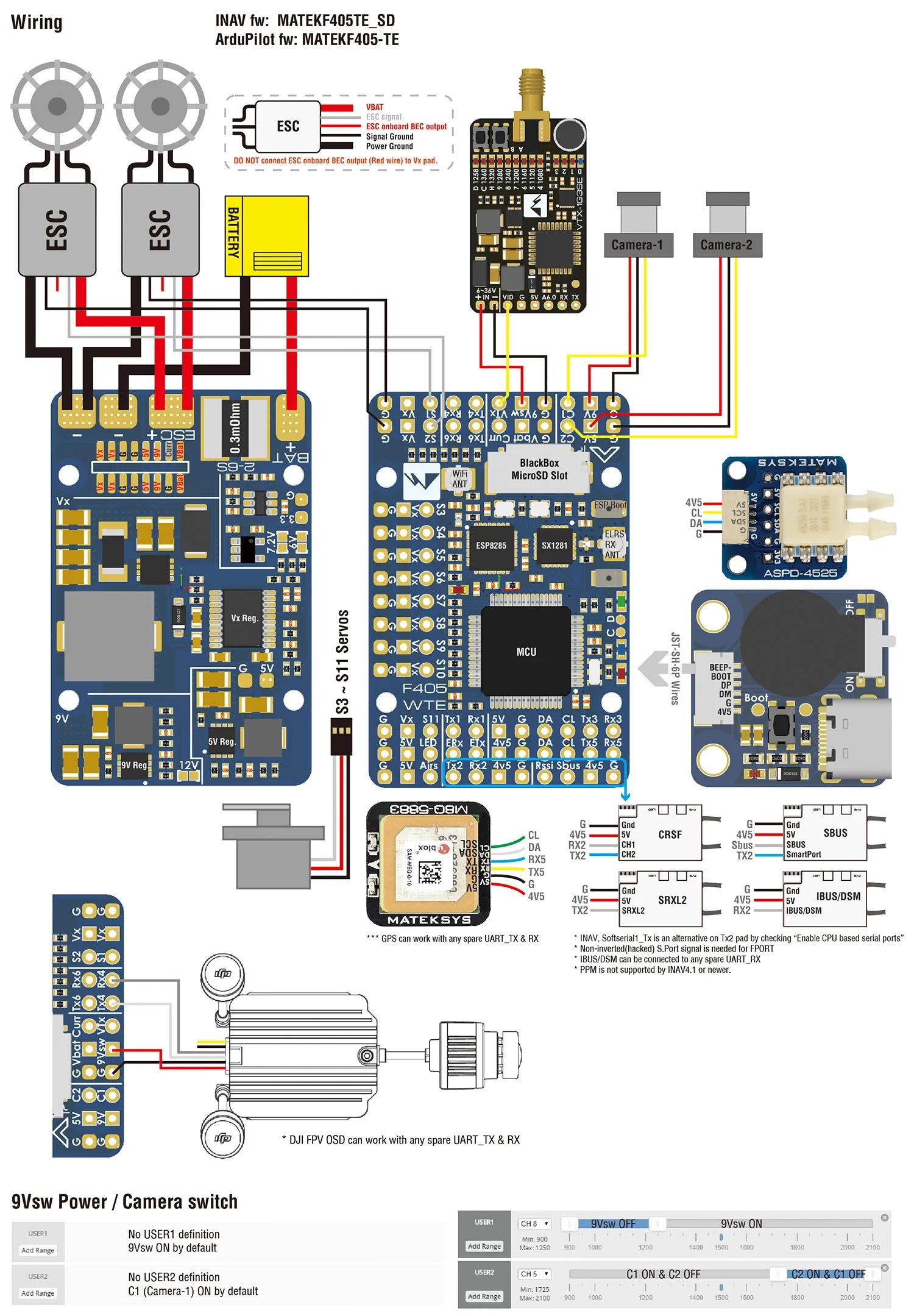
9V (12V) für VTX-Netzschalter
FC-Firmware
-
ArduPilot: MatekF405-TE
-
INAV: MATEKF405TE_SD (nicht verfügbar im INAV-Konfigurator 4.x)
PDB
-
Eingangsspannungsbereich: 6,8–30 V (2–6S LiPo)
-
1x ESC Power Pads
-
Batteriespannungsteiler 1K:20K (Skala 2100 in INAV, BATT_VOLT_MULT 21,0 in ArduPilot)
-
Stromsensor: 220 A, 3,3 V ADC (Skala 150 in INAV, 66,7 A/V in ArduPilot)
-
Erfassungswiderstand: 90 A kontinuierlich, 220 A Spitze
BEC 5V-Ausgang
-
Entwickelt für Flugsteuerung, Empfänger, OSD, Kamera, Summer, 2812 LED_Strip, Summer, GPS-Modul, AirSpeed
-
Dauerstrom: 2 Ampere, max. 3A
BEC 9V /12V-Ausgang
-
Entwickelt für Videosender, Kamera, Gimbal usw.
-
Dauerstrom: 2 Ampere, max. 3A
-
12-V-Option mit Jumper-Pad
-
Für einen stabilen 9V/12V-Ausgang sollte die Eingangsspannung > Ausgangsspannung +1V
sein
BEC Vx Ausgang
-
Entwickelt für Servos
-
Spannung einstellbar, 5 V Standard, 6 V oder 7,2 V über Jumper
-
Dauerstrom: 8 Ampere, max. 10 A
-
Für einen stabilen Vx-Ausgang sollte die Eingangsspannung > Vx-Spannung +1V
sein
BEC 3,3 V Ausgang
-
Entworfen für Baro/Kompass-Modul und externe 3.3V-Peripheriegeräte
-
Linearregler
-
Dauerstrom: 200mA
Physisch
-
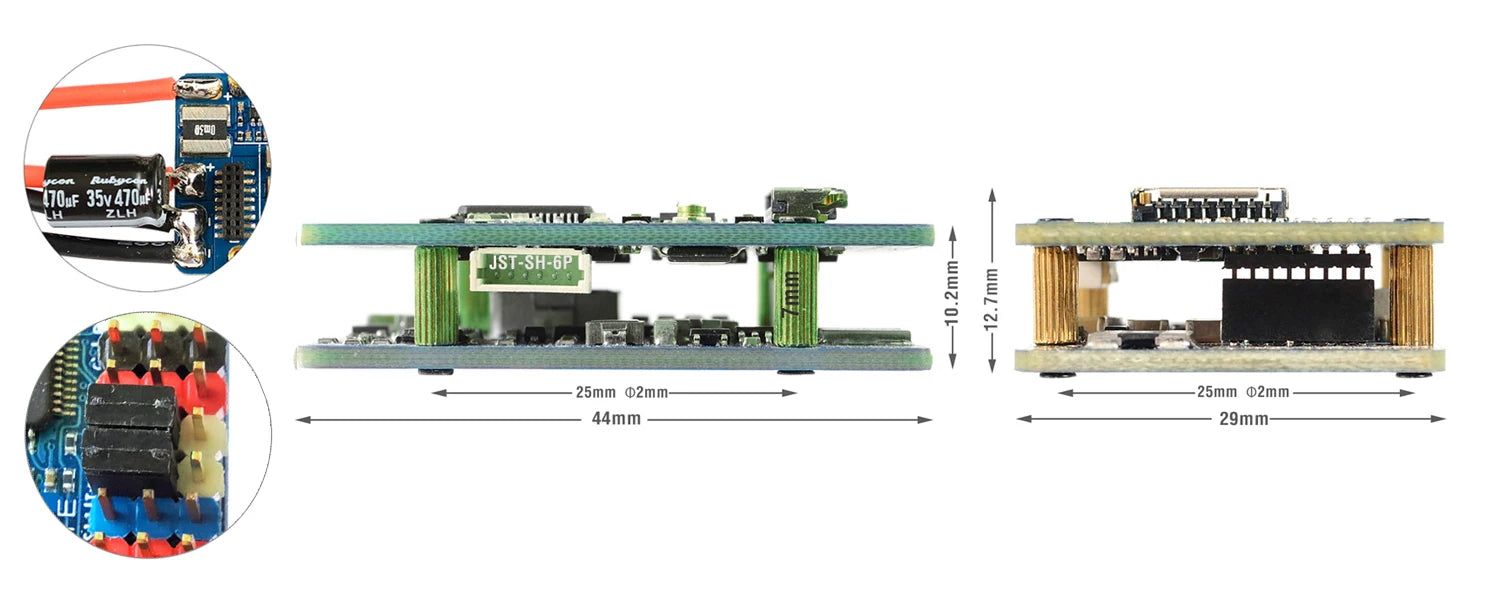
Montage: 25 x 25 mm, Φ2 mm
-
Abmessungen: 44 x 29 x 12,7 mm
-
Gewicht: 22 g mit USB-/Summer-Adapter
Einschließlich
-
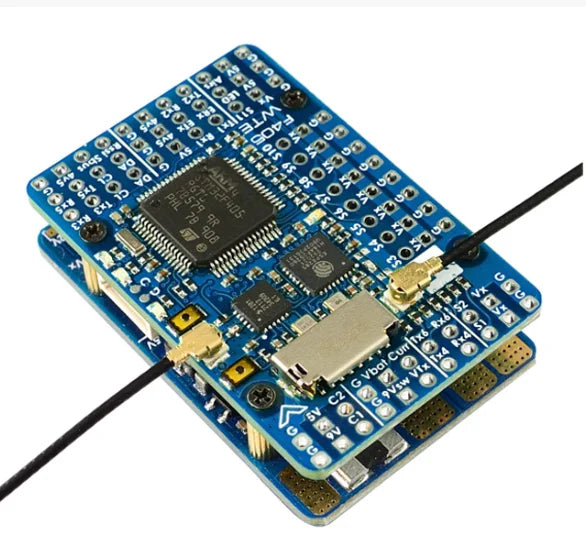
1x F405-WTE
-
1x USB (Typ-C)/Piepton (passiver Summer) Extender + 20 cm JST-SH-6P-zu-JST-SH-6P-Kabel für USB-Extender.
-
2x IPEX-MHF1 2.4G Antennen
-
1x Rubycon ZLH 35V 470uF Kondensator
-
Dupont 2,54 Pins (Platine wird ungelötet geliefert)
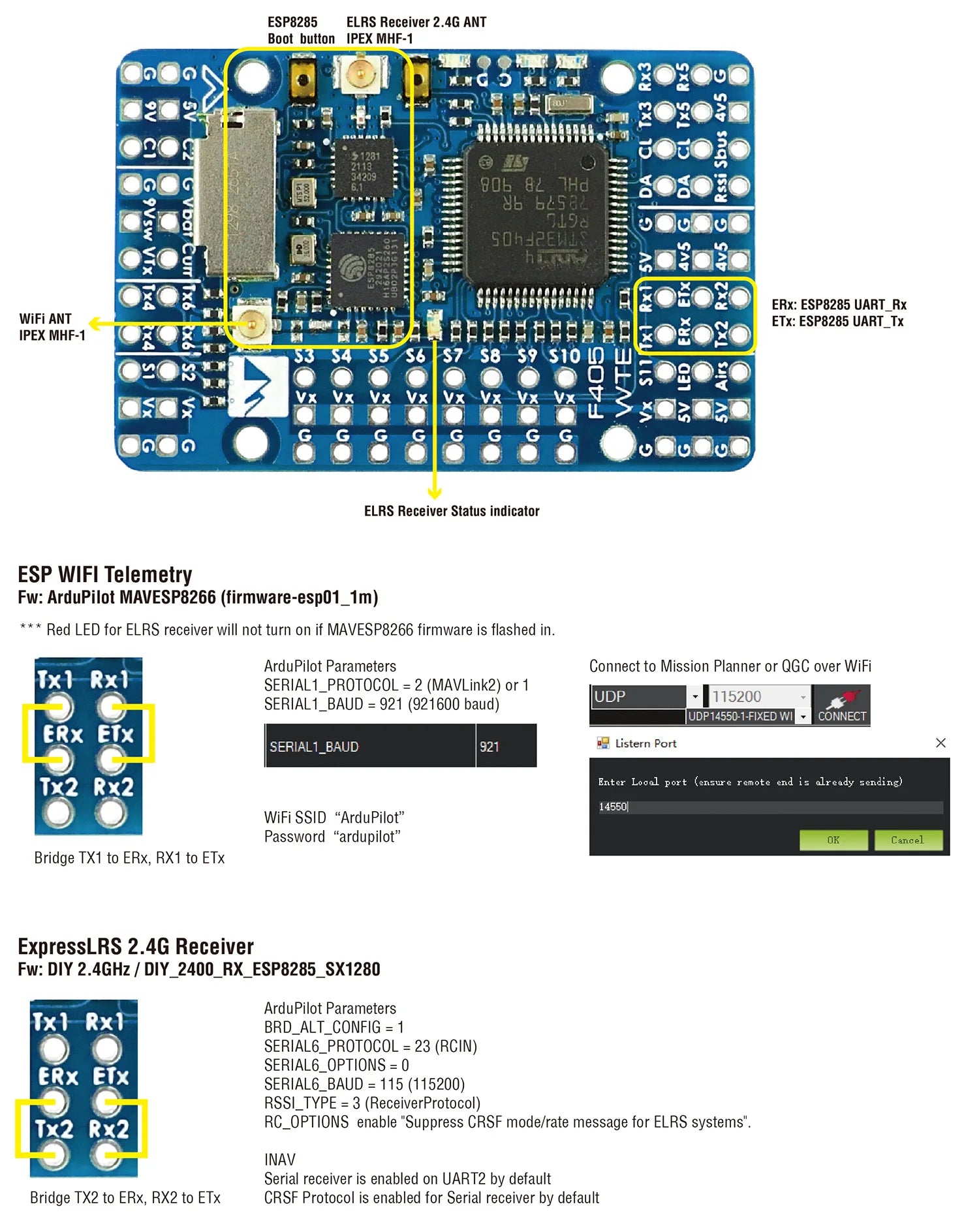
ArduPilot ESP8266 WLAN-Telemetrie
-
https://ardupilot.org/copter/docs/common-esp8266-telemetry.html
-
Firmware: firmware-esp01_1m.bin
-
Flashen mit ESP_NodeMCU-PyFlasher
-
Verdrahten Sie den ESP8285 (ETx, ERx) mit dem USB-TTL-Adapter, wobei ETx am F405-WTE mit dem Rx am USB-TTL und ERx mit dem Tx des USB-TTL verbunden ist. Verdrahten Sie 4v5 und GND von F405-WTE mit 5V und GND von USB-TTL
-
Schließen Sie den USB-TTL-Adapter an den PC an, während Sie die ESP8285-Starttaste gedrückt halten.
-
öffne ESP_NodeMCU-PyFlasher
-
wählen Sie Seriellen Port des USB-TTL-Moduls, laden Sie die Firmware, wählen Sie „Dual Output (DOUT)“ und „Ja.löscht alle Daten“
-
klicken Sie auf „Flash NodeMCU“
-
Nach dem Blinken schalten Sie den F405-WTE aus und dann über USB oder Batterie wieder ein.
-
Warten Sie ein paar Sekunden, suchen Sie nach der WLAN-SSID „ArduPilot“ und geben Sie als Passwort „ardupilot“ ein
-
Tipps: Die rote LED für den ELRS-Empfänger leuchtet nicht, wenn die MAVESP8266-Firmware geflasht wird.
-
ExpressLRS 2.4G-Empfänger
-
ExpressLRS AUX1-AUX8 sind keine Kanäle mit voller Auflösung. https://www.expresslrs.org/2.0/software/switch-config/
-
Flashen über WLAN
-
Schalten Sie den F405-WTE über USB ein. Die LED (rot) des Empfängers blinkt zunächst langsam und nach 30 Sekunden sollte sie schnell blinken, um anzuzeigen, dass er sich im WLAN-Hotspot-Modus befindet.
-
Detailliertere Schritte finden Sie auf dieser Seite.
-
Ziel: DIY 2,4 GHz / DIY_2400_RX_ESP8285_SX1280
-
-
Flashen über UART
-
Verdrahten Sie den ESP8285 (ETx, ERx) mit dem USB-TTL-Adapter, wobei ETx am F405-WTE mit dem Rx am USB-TTL und ERx mit dem Tx des USB-TTL verbunden ist. Verdrahten Sie 4v5 und GND von F405-WTE mit 5V und GND von USB-TTL.
-
Schließen Sie den USB-TTL-Adapter an den PC an, während Sie die ESP8285-Starttaste gedrückt halten.
-
Wählen Sie das Ziel aus DIY 2.4GHz / DIY_2400_RX_ESP8285_SX1280 und 5039>UART“ für Flashing-Methode, legen Sie Ihre Bindungsphrase und Firmware-Optionen fest und klicken Sie anschließend auf Build and Flash.
-
UDP-Verbindung mit INAV-Konfigurator über WLAN
-
Firmware: MSPWifiBridge_ESP-01.bin kompiliert basierend auf github.com/Scavanger/MSPWifiBridge
-
Flashen mit ESP_NodeMCU-PyFlasher
-
Verdrahten Sie den ESP8285 (ETx, ERx) mit dem USB-TTL-Adapter, wobei ETx am F405-WTE mit dem Rx am USB-TTL und ERx mit dem Tx des USB-TTL verbunden ist. Verdrahten Sie 4v5 und GND von F405-WTE mit 5V und GND von USB-TTL
-
Schließen Sie den USB-TTL-Adapter an den PC an, während Sie die ESP8285-Starttaste gedrückt halten.
-
öffne ESP_NodeMCU-PyFlasher
-
wählen Sie Seriellen Port des USB-TTL-Moduls, laden Sie die Firmware, wählen Sie „Dual Output(DOUT)“ und „Ja.löscht alle Daten“
-
klicken Sie auf „Flash NodeMCU“
-
Nach dem Blinken schalten Sie den F405-WTE aus und dann über USB oder Batterie wieder ein.
-
Warten Sie ein paar Sekunden, suchen Sie nach der WLAN-SSID „MSPWifiBridge“ und das Passwort lautet „123456789“
-
Wenn keine automatische Weiterleitung zur Konfigurationsseite erfolgt, gehen Sie manuell zu http://192.168.4.1 . Standard-Anmeldedaten: Benutzername: admin, Passwort: 123456789
-
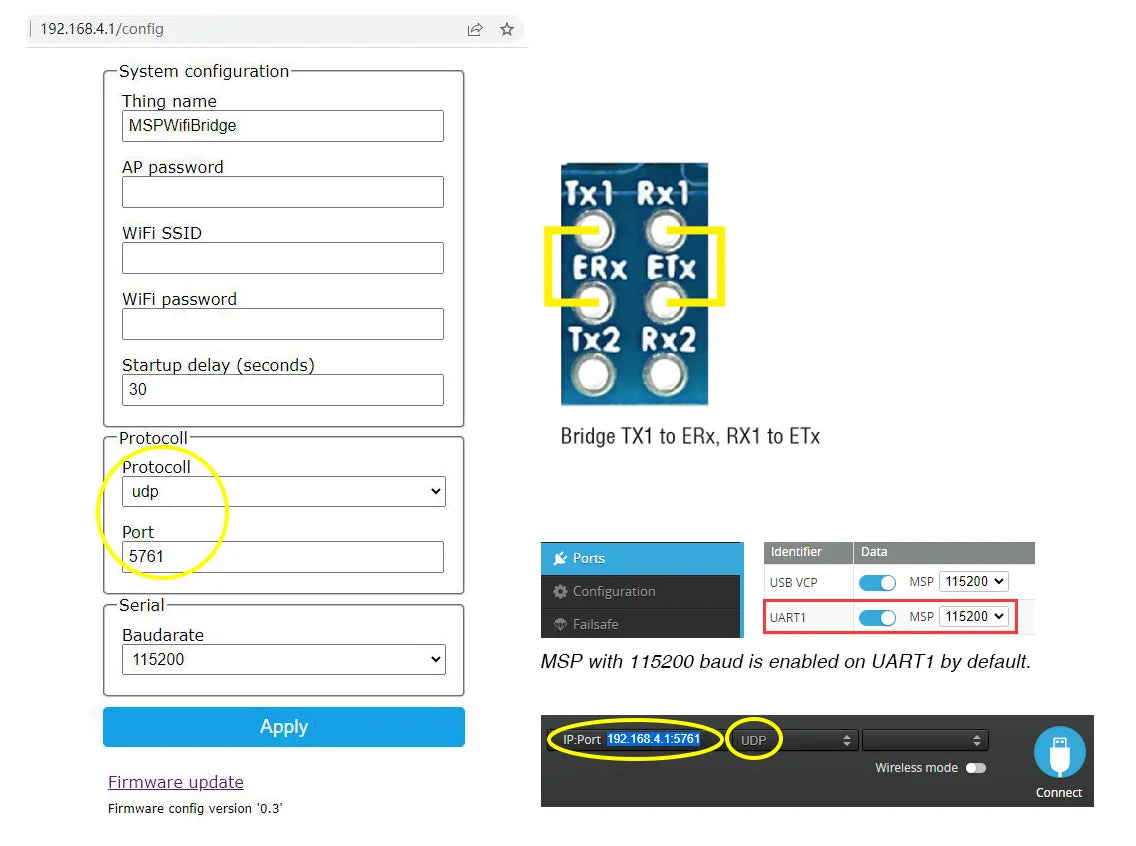
192.168.4.1/config Systemkonfiguration Thing_name MSPWifiBridge AP-Passwort Ixl Rx| WiFi SSID ERx ETx WiFi Passwort Tx2 Rx2 Staz Verzögerung (Sekunden 30 Protocoll Bridge TX1 zu erx, RXI zu ETx Protocoll udp Port 5761 Ponts Identifier Data USB VC?
Related Collections