MATEK H743-MINI V3 - Mateksys FLUGCONTROLLER
MATEK H743-MINI V3 - Mateksys FLUGCONTROLLER
MATEKSYS
Verfügbarkeit für Abholungen konnte nicht geladen werden
MATEK H743-MINI V3 – Mateksys FLIGHT CONTROLLER SPEZIFIKATIONEN
Verwendung: Fahrzeuge und ferngesteuerte Spielzeuge
Alter empfehlen: 12+y,14+y,3-6y,6-12y,0-3y
Herkunft: Festlandchina
Material: Verbundmaterial
Markenname: MATEKSYS
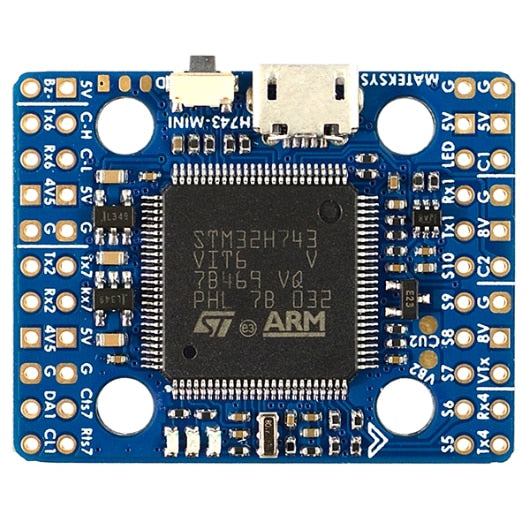
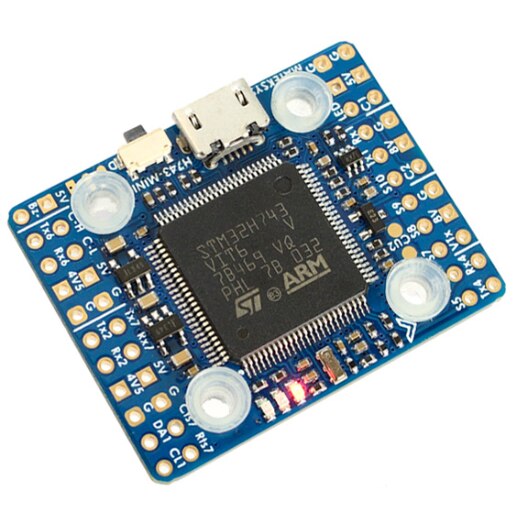
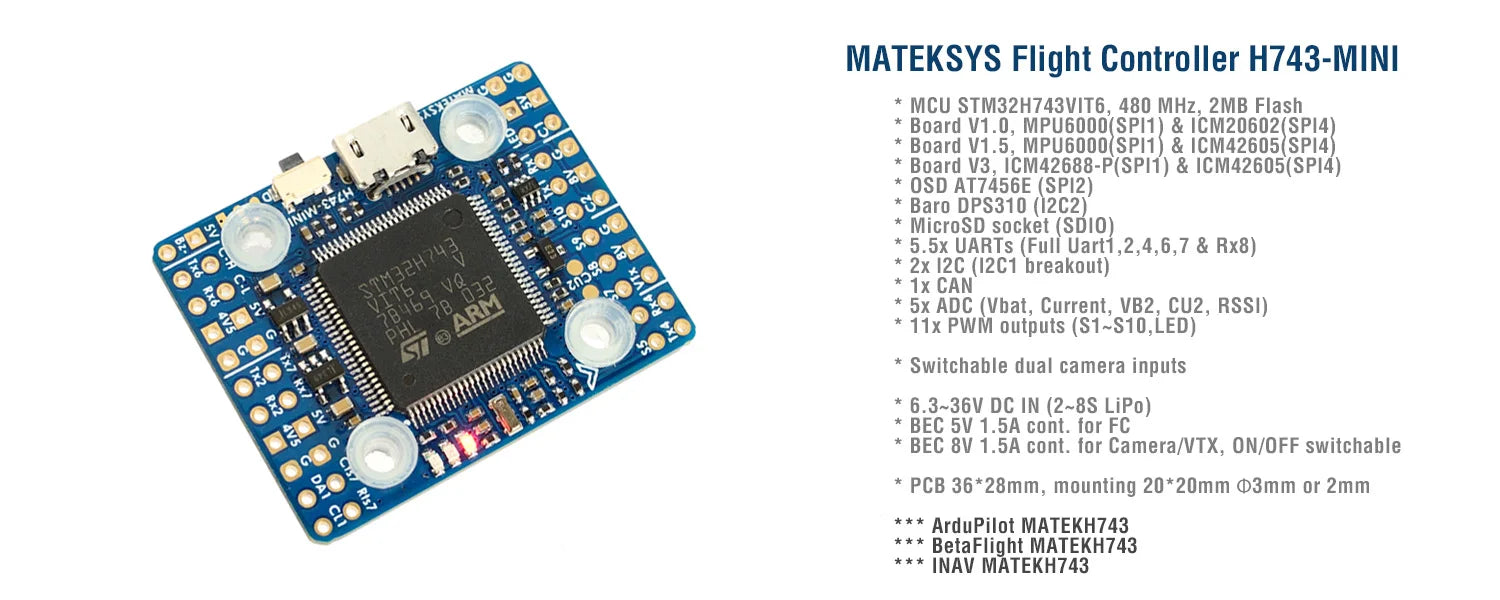
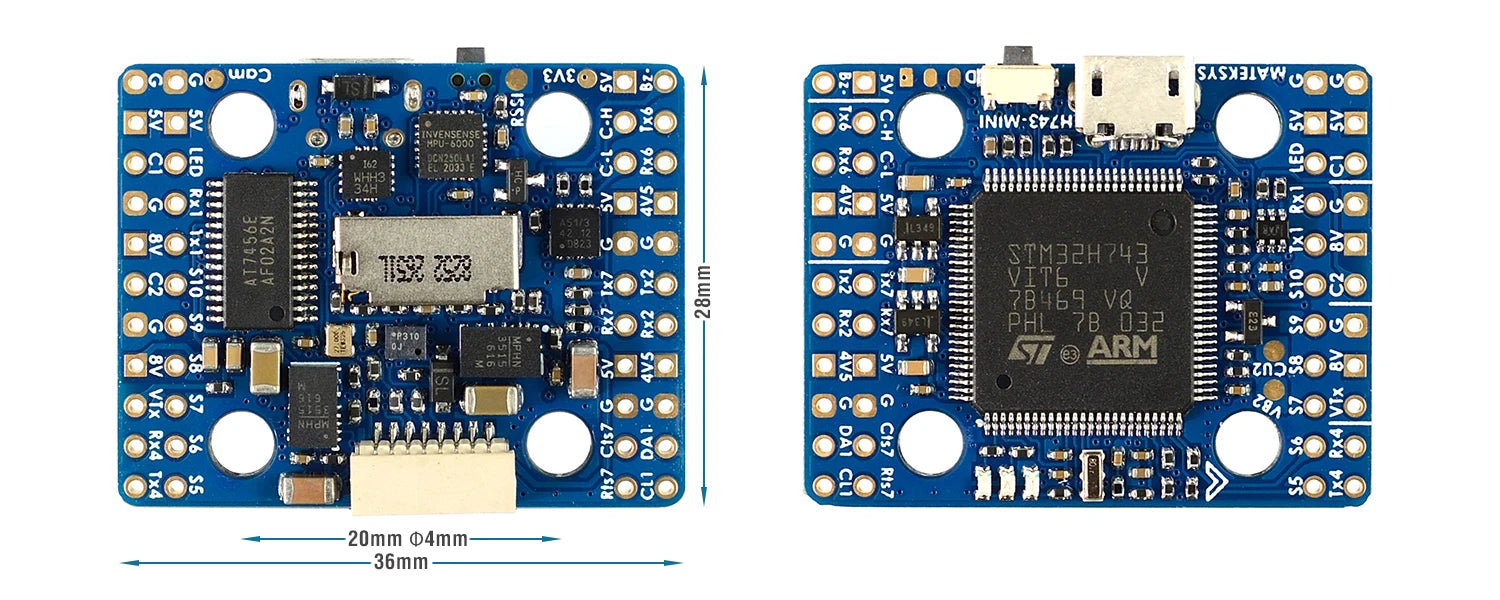
FLUGCONTROLLER H743-MINI
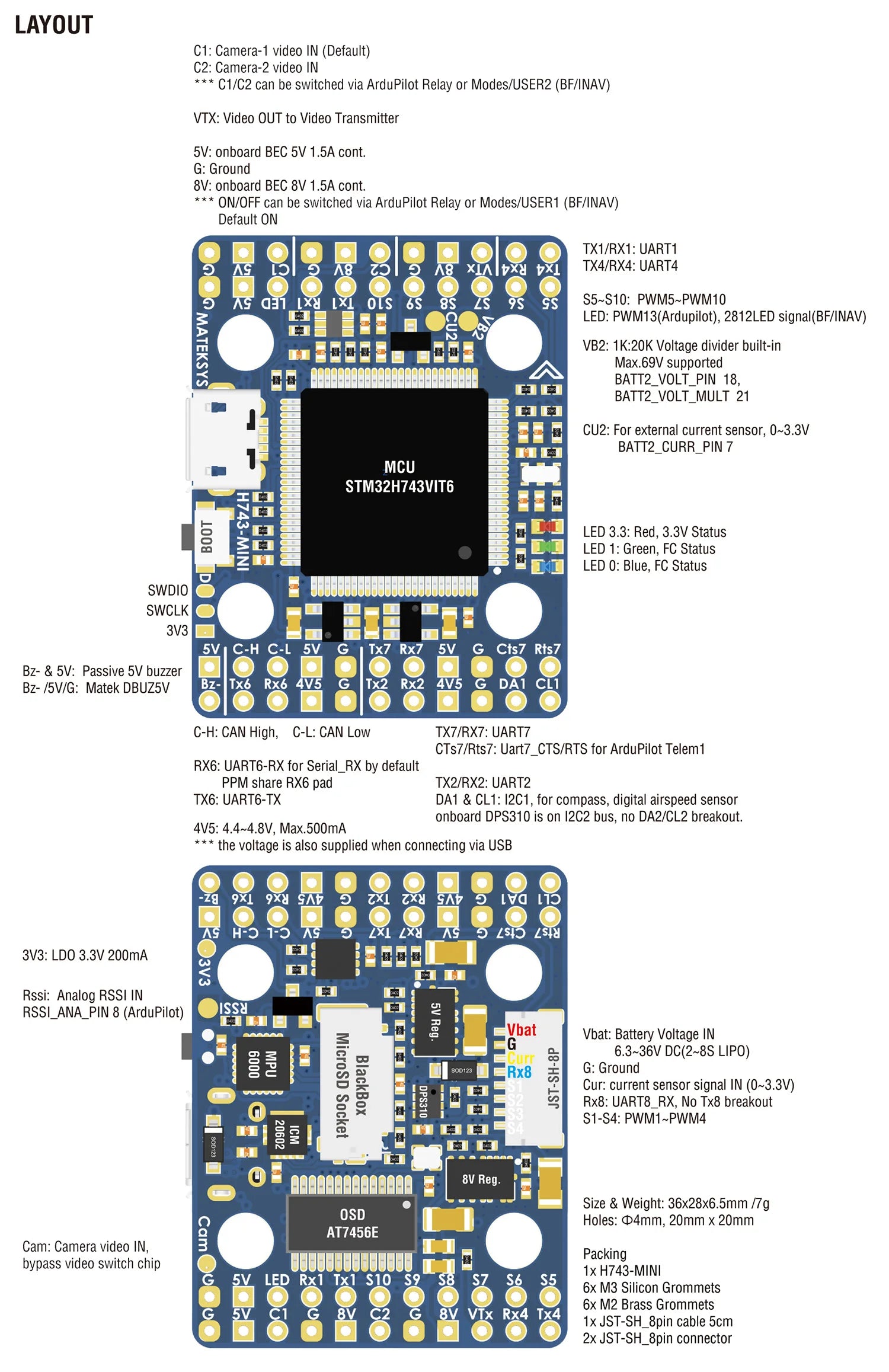
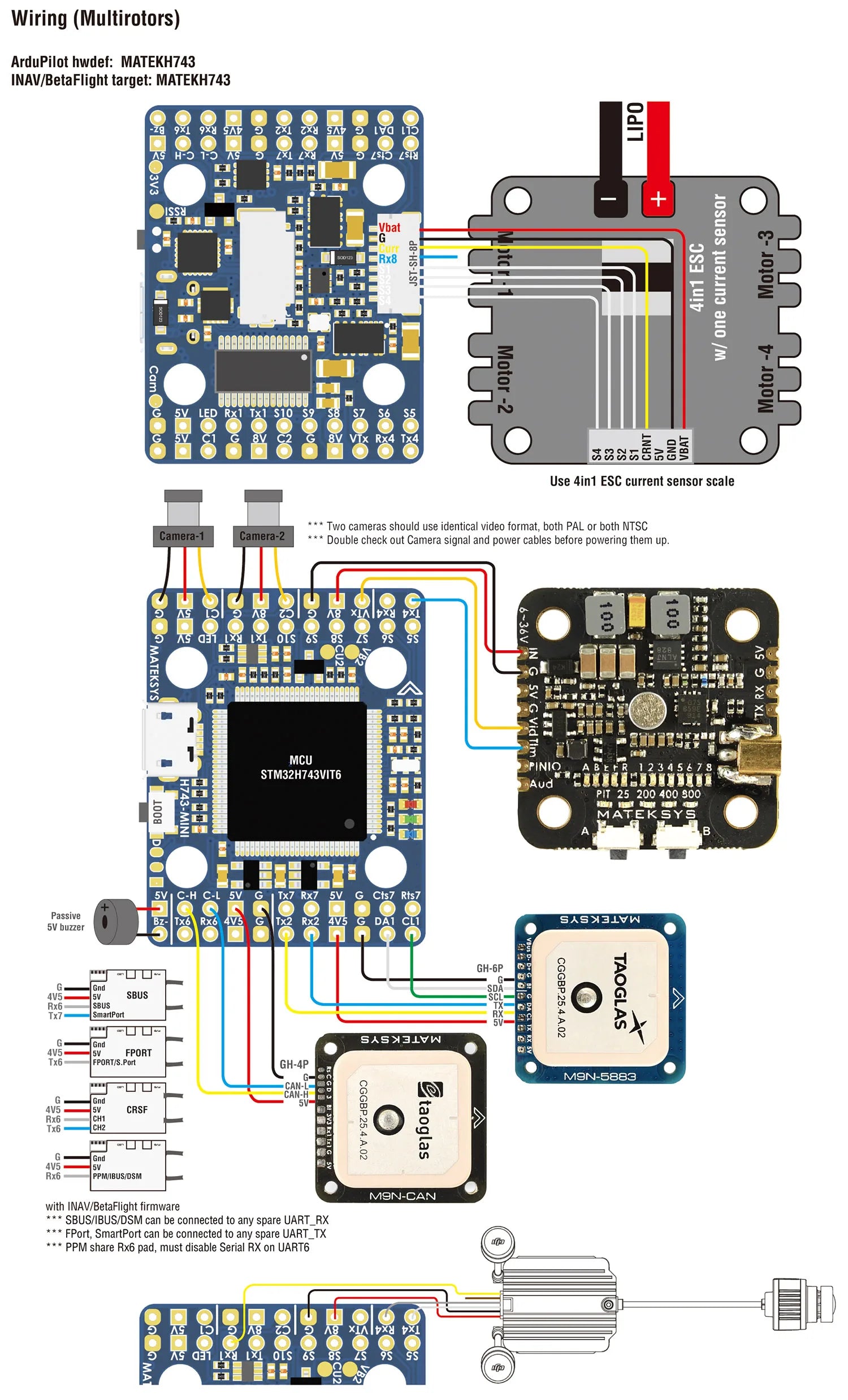
STM32H743VIT6, ICM20602 & MPU6000, DPS310, OSD, 5,5x UARTs, 2x I2C, 1x CAN, 11x PWM-Ausgänge, BEC5V, BEC8V
FC-Spezifikationen
-
MCU: STM32H743VIT6, 480 MHz, 1 MB RAM, 2 MB Flash
-
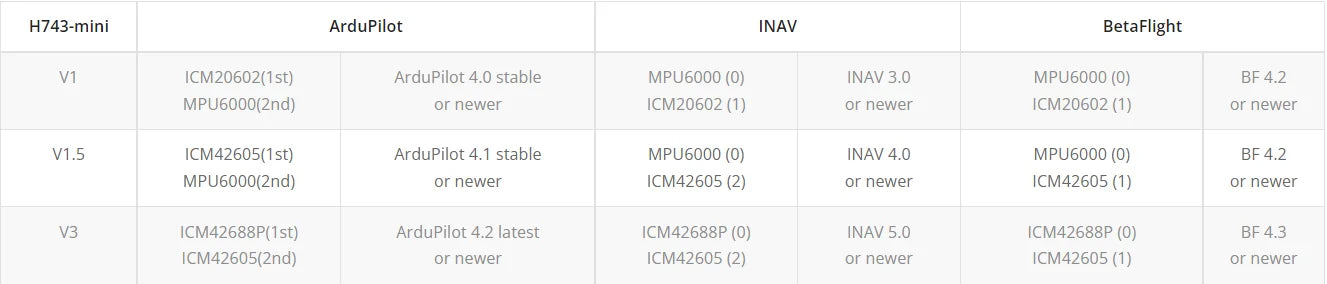
Board V1.0 IMU: MPU6000 (SPI1) & ICM20602 (SPI4)
-
Board V1.5 IMU: MPU6000 (SPI1) & ICM42605 (SPI4)
-
Board V3 IMU: ICM42688-P (SPI1) & ICM42605 (SPI4)
-
Baro: Infineon DPS310 (I2C2)
-
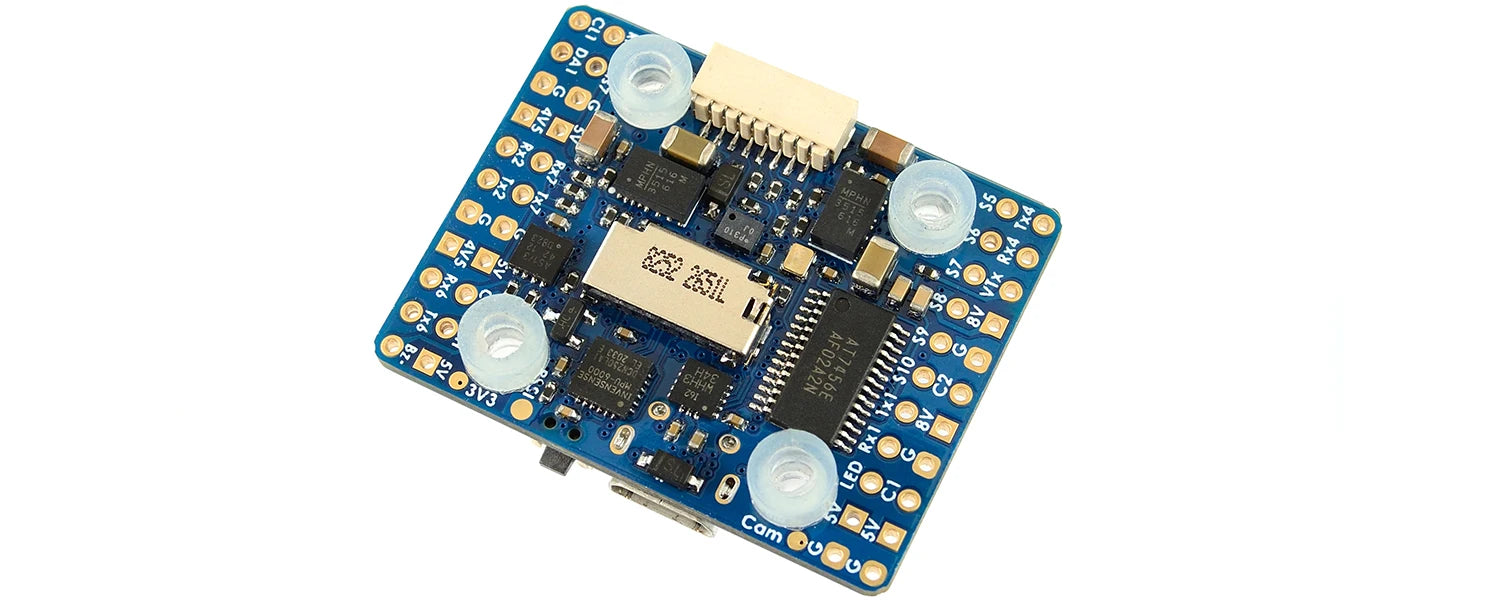
OSD: AT7456E (SPI2)
-
Blackbox: MicroSD-Kartensteckplatz (SDIO)
-
5,5x Uarts (1,2,4,6,7, Rx8)
-
11x PWM-Ausgänge
-
2x I2C (I2C1/DA1 CL1-Pads, kein I2C2-Breakout)
-
1x CAN (C-H, C-L Pads)
-
5x ADC (VBAT, Strom, RSSI, VB2, CU2)
-
3x LEDs für FC-STATUS (Blau, Rot) und 3,3-V-Anzeige (Rot)
-
1x JST-SH1.0_8pin Stecker (Vbat/G/Curr/Rx8/S1/S2/S3/S4)
-
Schalter für zwei Kameraeingänge
-
8-V-Strom-EIN/AUS-Schalter
Leistung
-
Vbat-Eingang: 6,3–36 V (2–8S LiPo)
-
BEC: 5V 1,5A Dauer. (Max.2A)
-
BEC: 8V 1,5A Dauer. (Max. 2A), 8V-Ausgänge stabil, wenn Vbat>=10V, 8V-Ausgänge 80 % von Vbat, wenn Vbat< 10V
-
LDO 3,3 V: 200 mA
-
VB2-Pad unterstützt max. 69V (Spannungsteiler 1K:20K)
-
Statische Leistung: 200mA@5V with Betaflight, 150mA@5V with ArduPilot
FC-Firmware
-
ArduPilot(ChiBiOS): MATEKH743
-
BetaFlight: MATEKH743
-
INAV: MATEKH743
Physisch
-
Montage
-
20 x 20 mm/Φ3 mm mit Silikontüllen
-
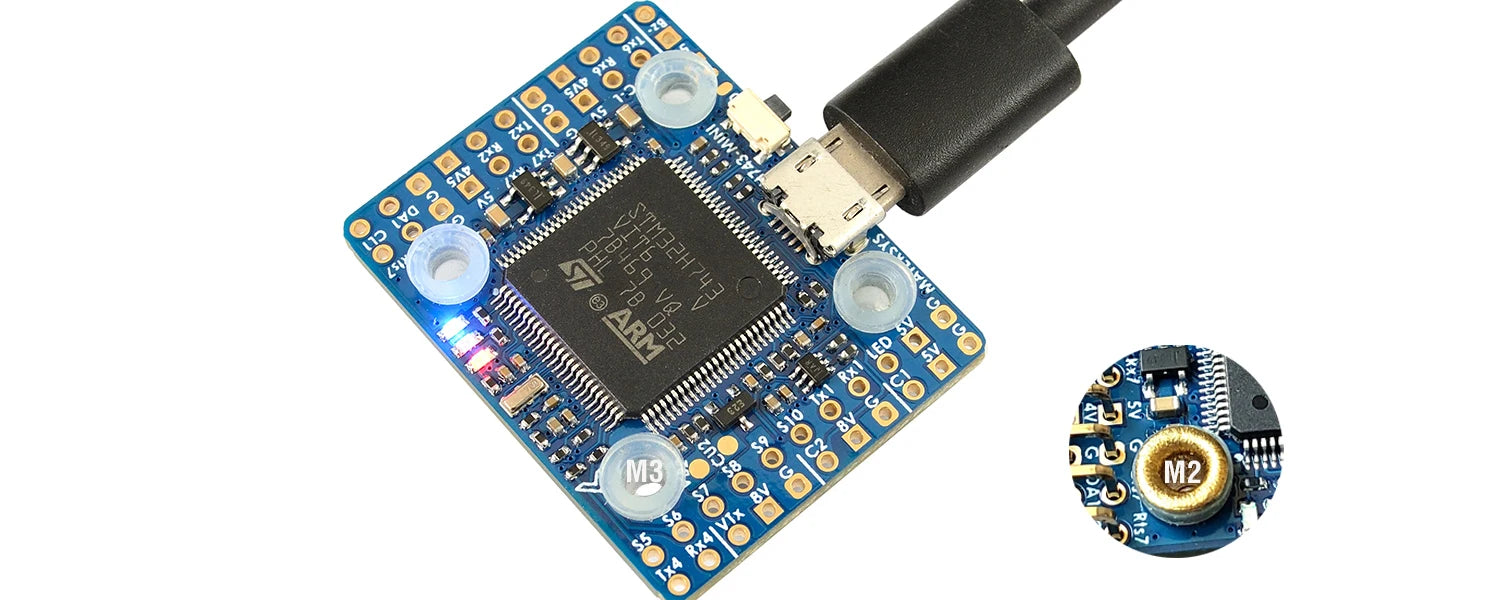
20 x 20 mm/Φ2 mm mit Silikon- und Messingtüllen
-
-
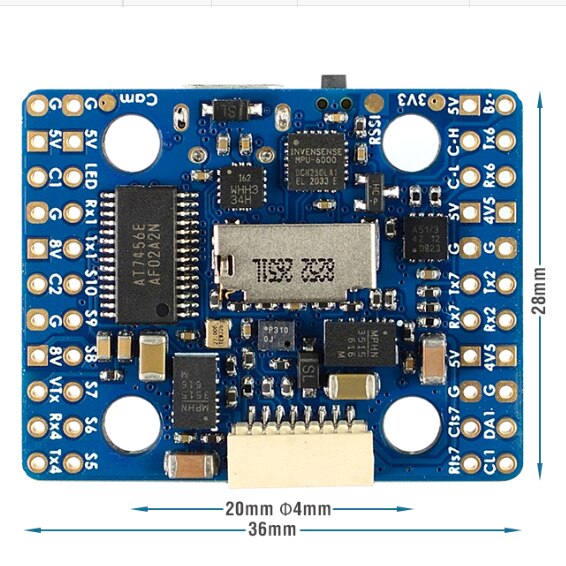
Abmessungen: 36 x 28 x 6,5 mm
-
Gewicht: 7g
Einschließlich
-
1x H743-MINI
-
6x Silikontüllen M4 bis M3
-
6x Messingtüllen M3 bis M2
-
1x JST-SH1.0_8pin Kabel, 5cm
-
2x JST-SH1.0_8pin Anschlüsse
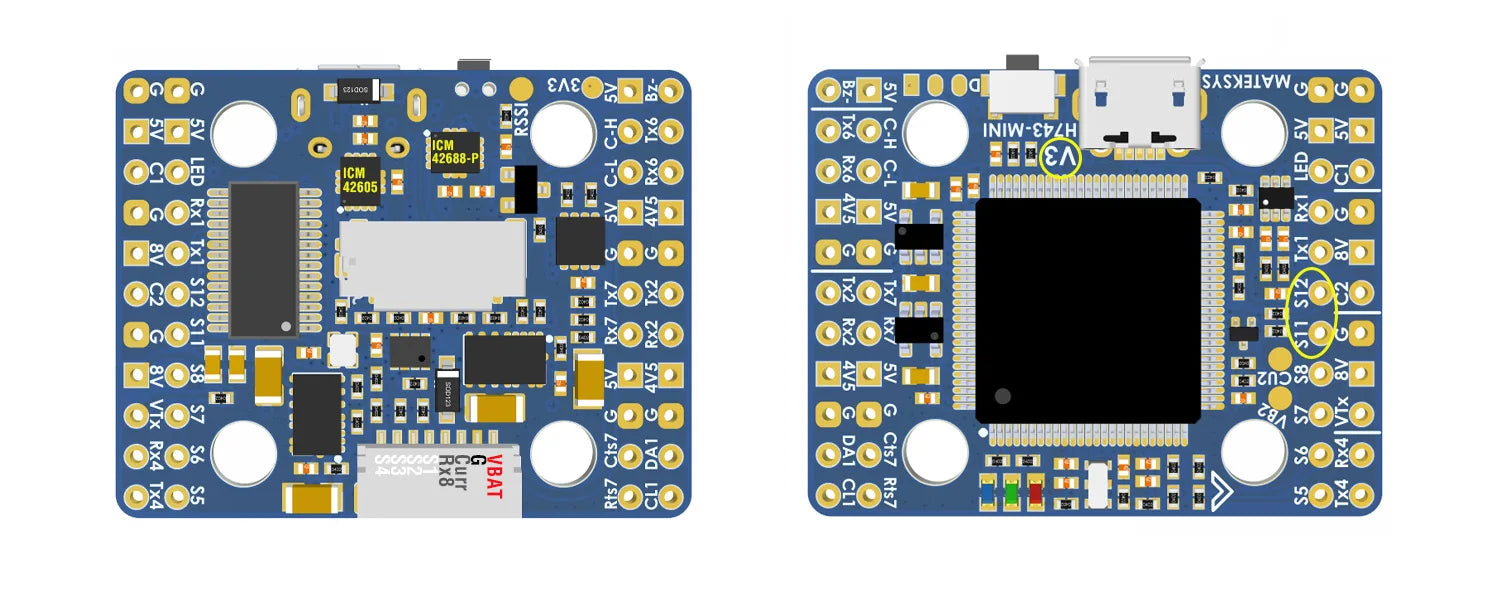
Was ist neu am H743-mini V3
-
ICM42688-P+ICM42605 statt MPU6000+ICM42605
-
PWM 10 & 11 statt PWM9 & 10(V1/V1.5)
-
Andere Funktionen, Layout und Komponenten sind dieselben wie bei der vorherigen Platinenversion.
-
H743-mini V3 hat betaflight_4.3.0 für QC vorinstalliert
ArduPilot
-
H743-mini-V3 mit ICM42688-P wird von ArduPilot 4.2 oder höher unterstützt,
-
ICM42688-P ist als erste IMU (IMU0) definiert, ICM42605 ist die zweite (IMU1).
-
Setzen Sie bei ArduPilot 4.2 INS_ENABLE_MASK auf 7 oder den Standardwert 127.
-
Es wird empfohlen, STM32CubeProgrammer zum Löschen der MCU und zum Hochladen der Firmware zu verwenden. Schauen Sie sich diesen Blog an http://www.mateksys.com/?p=6905
INAV
-
H743-mini-V3 wird von INAV4.1, das vom Konfigurator heruntergeladen wurde, nicht unterstützt. Bitte laden Sie inav_4.1.0_MATEKH743_42688 von unserer Website herunter.
-
Ab INAV5.0 verwenden V1/V1.5/V3 dieselbe Firmware.
BetaFlight
-
IMU ICM42688-p wird von BetaFlight 4.3 oder höher unterstützt.
-
icm42688-p ist die erste IMU (Standard), ICM42605 ist die zweite IMU.
-
Ziel MATEKH743 in der BetaFlight 4.2.x-Liste unterstützt die ICM426XX-Serie nicht. Sie müssen es mit BF4.3_RC oder der neuesten Version flashen
Related Collections