Matek Systems GNSS M10Q-5883 U-Blox M10 GPS – mit Kompass QMC5883L Modul Digital AirSpeed 4~9V für FPV Racing Drone
Matek Systems GNSS M10Q-5883 U-Blox M10 GPS – mit Kompass QMC5883L Modul Digital AirSpeed 4~9V für FPV Racing Drone
MATEKSYS
Normaler Preis
$79.00 USD
Normaler Preis
Verkaufspreis
$79.00 USD
Grundpreis
pro
Inkl. Steuern.
Versand wird beim Checkout berechnet
Verfügbarkeit für Abholungen konnte nicht geladen werden
Matek Systems GNSS M10Q-5883 U-Blox M10 GPS-SPEZIFIKATIONEN
Radstand: Bodenplatte
Verwendung: Fahrzeuge und ferngesteuertes Spielzeug
Teile/Zubehör aktualisieren: GPS
Werkzeugzubehör: Baugruppenkategorie
Technische Parameter: KV1100
Größe: wie gezeigt
Fernbedienungsperipheriegeräte/-geräte: Fernbedienung
Alter empfehlen: 12+J
RC-Teile und Zubehör: M10Q-5883
Menge: 1 Stück
Herkunft: Festlandchina
Modellnummer: Matek GNSS M10Q-5883
Material: Verbundmaterial
Allradantriebsattribute: Baugruppe
Für Fahrzeugtyp: Flugzeuge
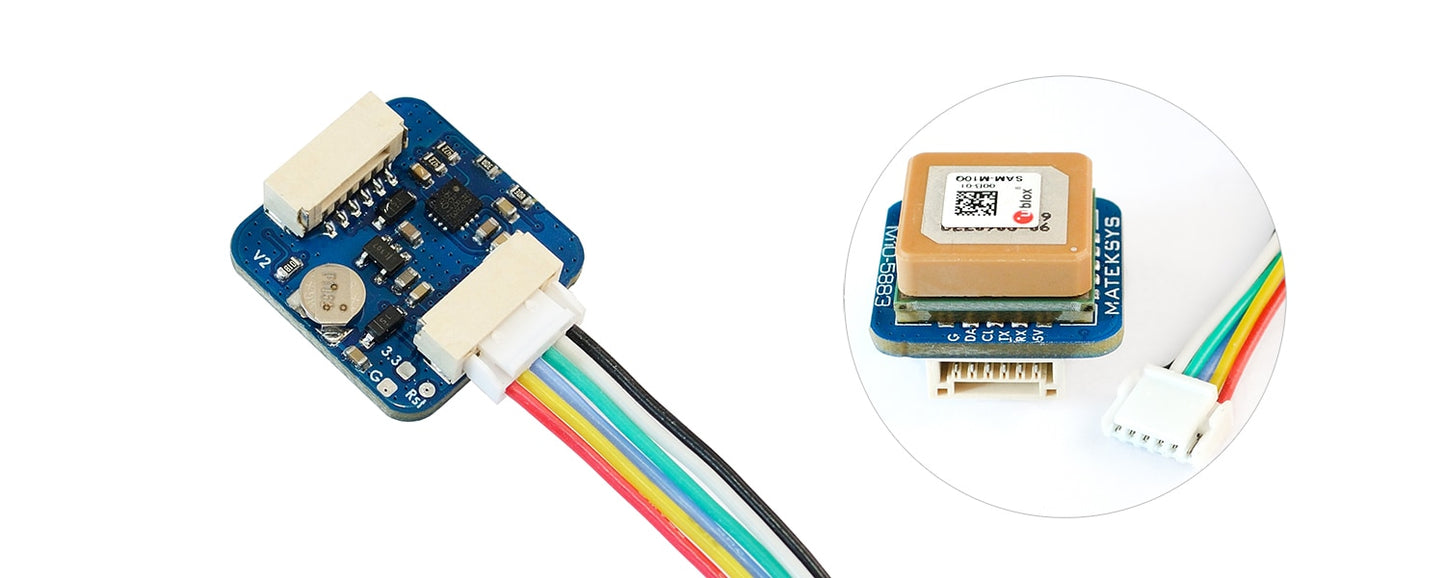
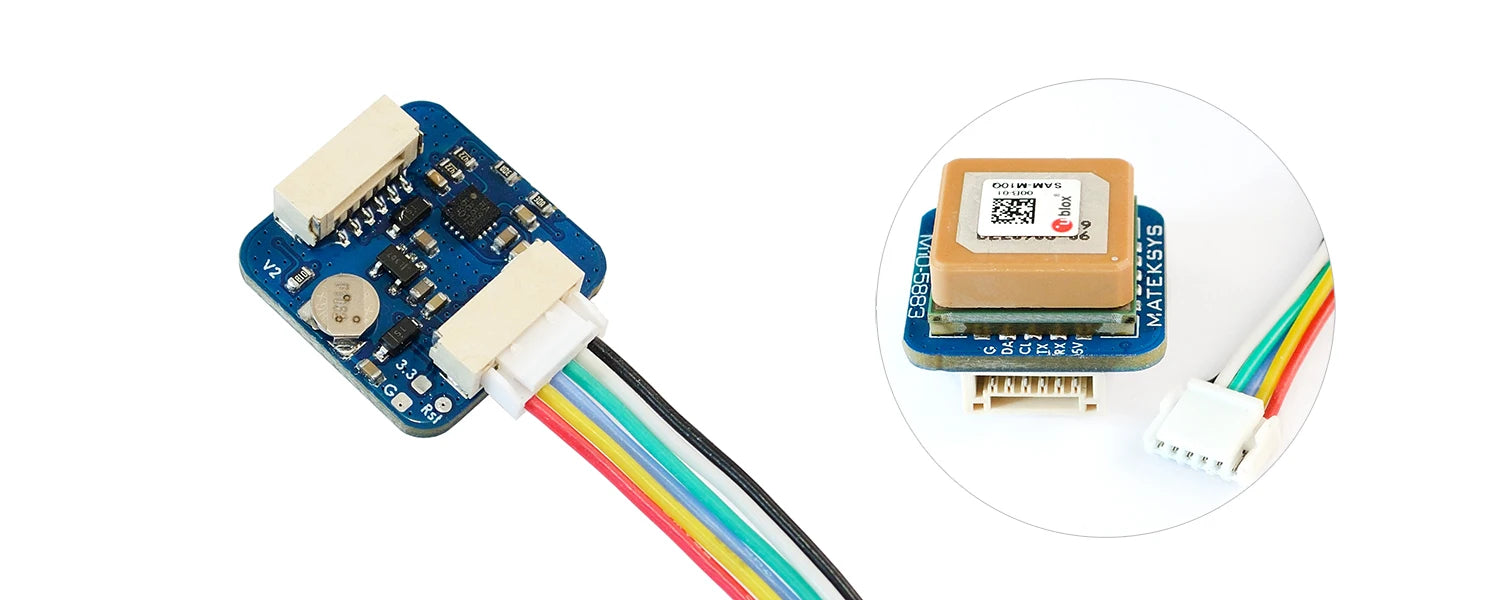
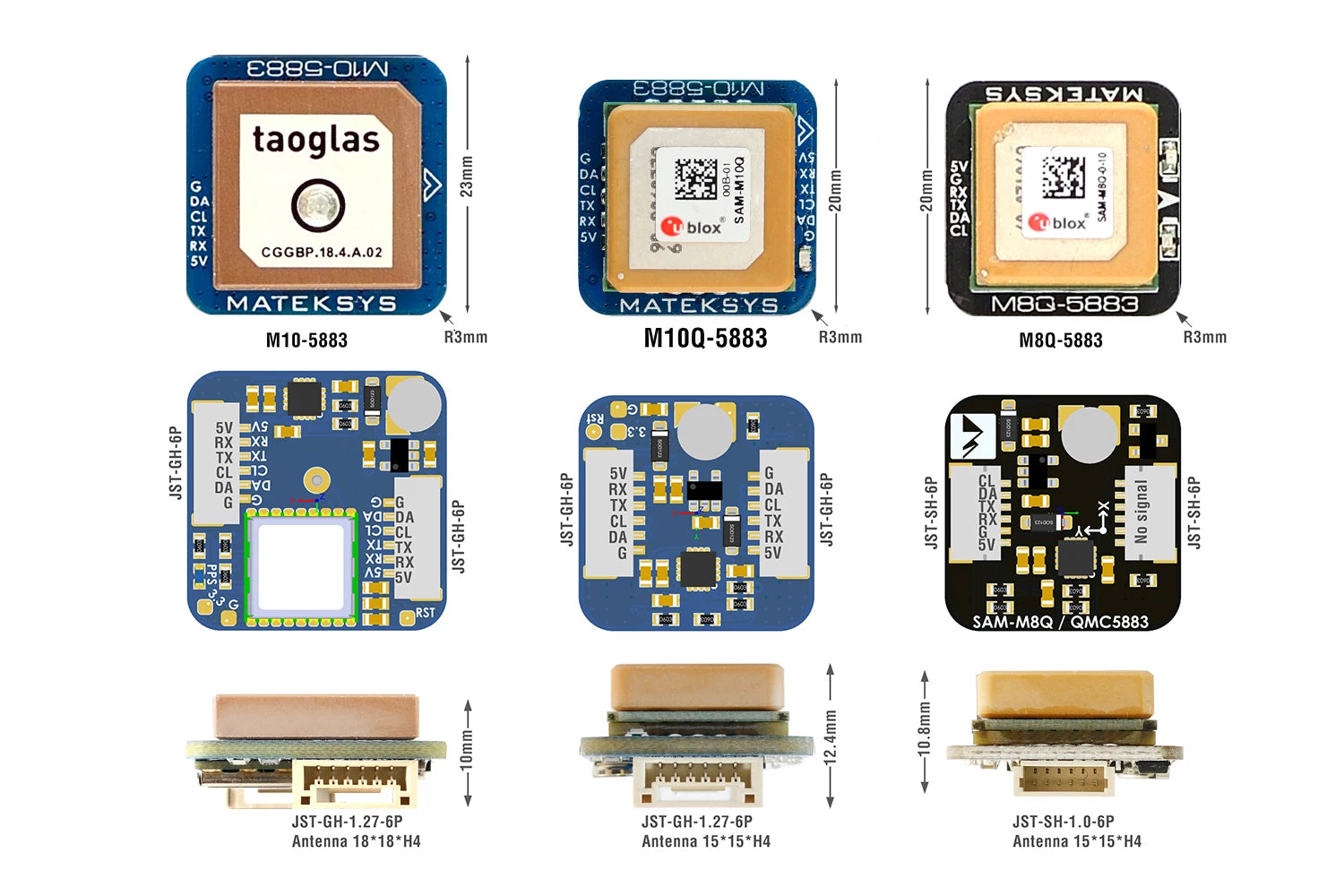
M10Q-5883 verwendet ein GNSS-Modul mit mehreren Konstellationen, das von u-blox SAM-M10Q-00B angetrieben wird.
Der SAM-M10Q verfügt über die standardmäßige Präzisions-GNSS-Plattform M10 von u-blox und bietet außergewöhnliche Empfindlichkeit und Erfassungszeit für alle L1-GNSS-Signale. SAM-M10Q unterstützt den gleichzeitigen Empfang von vier GNSS (GPS, GLONASS, Galileo und BeiDou). Die hohe Anzahl sichtbarer Satelliten ermöglicht es dem Receiver, die besten Signale auszuwählen. Dies maximiert die Positionsverfügbarkeit, insbesondere unter anspruchsvollen Bedingungen wie in tiefen Häuserschluchten. Die Super-S-Technologie (Super-Signal) von u-blox bietet eine hohe HF-Empfindlichkeit und kann die dynamische Positionsgenauigkeit in Szenarien ohne Sichtverbindung verbessern.
Die 15 x 15 mm2 große Patchantenne mit hoher Verstärkung bietet die beste Balance zwischen Leistung und kleiner Größe. Das omnidirektionale Strahlungsmuster der Antenne erhöht die Flexibilität bei der Geräteinstallation.
Weitere Details zum SAM-M10Q finden Sie auf der Seite zum SAM-M10Q von u-blox
Spezifikationen
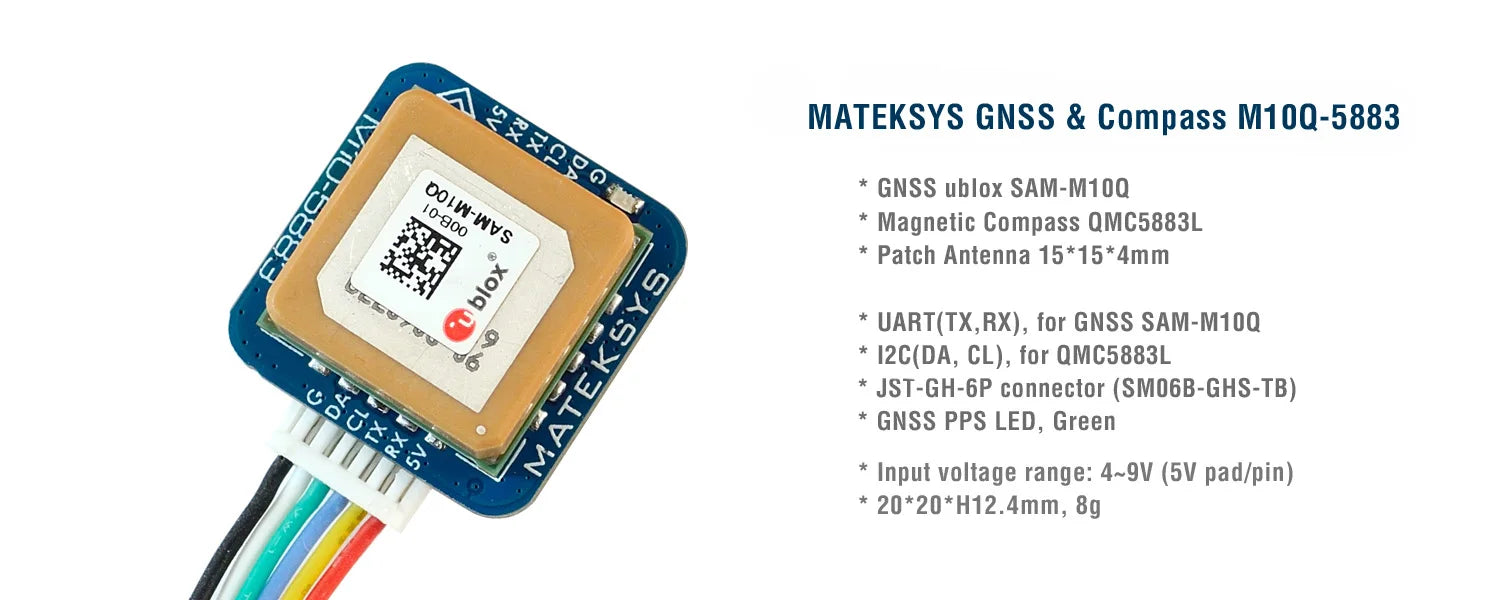
GNSS u-blox SAM-M10Q- 00B (GPS, GLONASS, Galileo und BeiDou)
Magnetischer Kompass QMC5883L
Patchantenne 15*15*4mm
Eingangsspannungsbereich: 4~9V (5V Pad/Pin)
Stromverbrauch: 13mA
UART-Baudrate: 9600 Standard
Betriebstemperaturen: -20~80 °C
UART(TX, RX)-Schnittstelle für GNSS SAM-M10Q-00B
I2C(DA, CL)-Schnittstelle für Compass QMC5883L
JST-GH-6P-Stecker (SM06B-GHS-TB). 1,27 mm Abstand
GNSS PPS-LED, grün. (Leuchtet nach dem Einschalten, blinkt (1 Hz), wenn GNSS 3D-Fix erhält)
Protokoll: UBX(u-blox) 5Hz@GPS+GAL+BDS B1C+GLO oder NMEA 1Hz
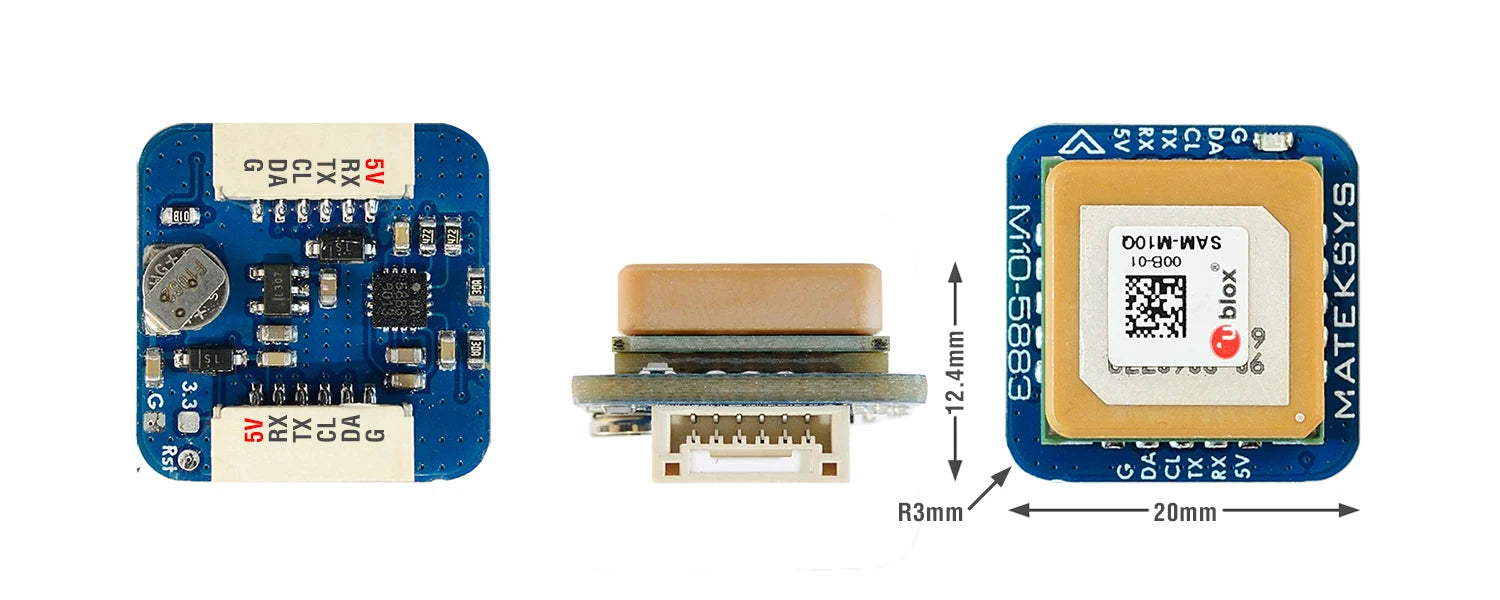
20mm*20mm*12,4mm
8g
M10Q-5883_step.zip
Enthält
1x M10Q-5883
1x JST-GH-6P bis JST-GH-6P 20 cm Silikondraht
Verkabelung und Einstellungen
M10Q-5883 5V zum Flugregler 4~9V
M10Q-5883 RX zum Flugregler UART_TX
M10Q-5883 TX zum Flugregler UART_RX
M10Q-5883 CL zum Flugregler I2C_SCL
M10Q- 5883 DA zum Flugcontroller I2C_SDA
M10Q-5883 G zum Flugcontroller GND
Tipps und Hinweise
Kompassausrichtung (flache Montage): Vom Neigen des Magnetometers wird dringend abgeraten!
INAV/BetaFLight: Kompasspfeil nach vorne, CW 270° einstellen. Drehen, wenn der Pfeil des Flugcontrollers nach vorne zeigt.
INAV/BetaFLight: Kompasspfeil nach hinten, CW 90° einstellen. Drehen, wenn der Pfeil des Flugcontrollers nach vorne zeigt.
Ardupilot/Mission Planner: Rotation Keine.
Stellen Sie sicher, dass Kompass/Magnetometer 10 cm von Stromleitungen/ESC/Motoren/eisenbasiertem Material entfernt sind.
------–
INAV 5.0.0, Betaflight 4.3.0 , ArduPilot 4.3 oder neuer ist erforderlich.
Die Serien UBlox NEO-M9N, MAX-M10S und SAM-M10Q verfügen alle über keinen integrierten Dataflash.Sobald GNSS ausgeschaltet ist und der Superkondensator leer ist. Die Einstellungen werden auf die Standardeinstellungen zurückgesetzt.
Das UBX-Protokoll ist bidirektional. Die Firmware des Flugcontrollers kann die GPS-Einstellungen über das UBX-Protokoll ändern. Sie müssen keine GNSS-Modulparameter in u-center festlegen.
Die Standardkonfiguration auf SAM-M10Q mit ublox FW 5.1 ist der gleichzeitige Empfang von GPS, Galileo, GLONASS und BeiDou B1C mit aktiviertem QZSS und SBAS.
Beginnen Sie mit u-blox GNSS FW3.01, der Zeitimpuls wird an der UTC-Zeit ausgerichtet und diese Zeit wird erst nach dem Herunterladen der Schaltsekunde gültig eingestellt. Das kann bis zu 12,5 Minuten dauern. Wahrscheinlich blinkt die PPS-LED nicht sofort, nachdem das GPS die 3D-Korrektur durchgeführt hat.
Der M10Q-5883 bietet die Möglichkeit, den Empfänger zurückzusetzen. Durch das Überbrücken des „RST“-Pads mit Masse für mindestens 100 ms wird ein Kaltstart ausgelöst. RESET löscht alle Informationen und löst einen Kaltstart aus. Es sollte nur als Wiederherstellungsoption verwendet werden. Wenn Sie sicher sind, dass Verkabelung und Einrichtung in Ordnung sind. aber der Flugcontroller kann das GNSS-Modul nicht erkennen (graues GPS-Symbol), versuchen Sie es mit einem Reset.
Die Kratzer auf der Keramikantenne sind das Ergebnis der Abstimmung der Antenne.
Beheben Sie GPS-bezogene Probleme: http://www.mateksys.com/?p=5712#tab-id-6
u-center Windows
*** Der SKU-Siebdruck auf der ersten Charge der M10Q-5883-Leiterplatte lautet „M10-5883“.
Matek Systems GNSS-Modul (M10Q-5883 ) und Kompassmodul (QMC5883L) mit magnetischem Kompass und Patchantenne, mit einer kompakten Größe von 15 mm x 15 mm x 4 mm und UART-Schnittstelle für Übertragung und Empfang (TX/RX).
Related Collections