


MATEKSYS H7A3-SLIM Flugcontroller - ICM42688P - 30x30
MATEKSYS H7A3-SLIM Flugcontroller - ICM42688P - 30x30
MATEKSYS
Verfügbarkeit für Abholungen konnte nicht geladen werden
Der MATEKSYS H7A3-SLIM Flight Controller bietet hohe Leistung in einem kompakten 30x30mm Design. Er verfügt über den STM32H7A3RIT6 MCU, einen 280MHz Cortex-M7 Prozessor, 1,4MB RAM und 2MB Flash. Mit dem ICM42688P IMU, dem SPL06-001 Barometer, dem AT7456E OSD und der 128MB Flash Blackbox liefert er präzise Daten und umfangreiche Protokollierung. Der Controller umfasst 6 UARTs, 11 PWM-Ausgänge, 1 I2C, 1 CAN-Port und 4 ADC-Kanäle. Er hat außerdem drei Status-LEDs, einen USB Typ-C Anschluss und einen schaltbaren 9V Ausgang. Mit einem Montagemuster von 30,5 x 30,5mm, 4mm Löchern, 3mm Grommets und einem Gewicht von nur 7g ist er perfekt für FPV-Rennen und Freestyle-Flug. Eine 3D-Step-Datei ist für die individuelle Integration enthalten.
Funktionen
- Bildschirmanzeige
- 30x30 Montage
- Kompaktes Design
- Konnektivität
- Leichtgewicht
Spezifikationen
Spezifikationen
- MCU: STM32H7A3RIT6, 280MHz Cortex-M7, 1.4MB RAM, 2MB Flash
- IMU: ICM42688P
- Baro: SPL06-001
- OSD: AT7456E
- Blackbox: 128MB Flash (1G-bit NAND)
- 6x Uarts (1,2,3,4, 5, 6) mit integrierter Inversion.
- 11x PWM-Ausgänge
- 1x I2C
- 1x CAN
- 4x ADC (VBAT, Strom, VB2, Cur2)
- 3x LEDs für FC STATUS (Blau, Rot) und 3.3V Indikator (Rot)
- USB Typ-C (USB2.0)
- 8x PWM-Ausgänge an 2x JST-SH1.0_8pin-Stecker für 2x 4in1 ESC
- 1x JST-GH1.25_4pin-Stecker (5V/CAN-H/CAN-L/G)
- 9V-Ausgang EIN/AUS schaltbar
- Digitales Video-OSD wird von jedem freien UART unterstützt
Strom
- Vbat-Eingang: 6~36V (2~8S LiPo)
- BEC: 5V 2A kontinuierlich (Max. 3A)
- BEC: 9V 2A kontinuierlich (Max. 3A)
- LDO 3.3V: Max. 200mA
- Kein integrierter Stromsensor
- ADC VB2 Pad unterstützt Max. 69V (Spannungsteiler: 1K:20K)
FC-Firmware
- ArduPilot: MATEKH7A3 (4.6 oder neuer)
- ArduPlane https://firmware.ardupilot.org/Plane/beta/MatekH7A3/
- ArduCopter &https://firmware.ardupilot.org/Copter/beta/MatekH7A3/
- Flashen mit STM32CubeProgrammer
Physisch
- Montage: 30,5 x 30,5 mm, Φ4 mm mit Grommets Φ3 mm
- Abmessungen: 36 x 36 x 5 mm
- Gewicht: 7 g
- 3D Schritt H7A3-SLIM_step.zip
Inklusive
- 1x H7A3-SLIM
- 6x Silikon-Grommets M4 auf M3
- 2x JST-SH1.0_8pin-Kabel, 5cm, & 8-polige Anschlüsse
- 1x JST-GH-4P zu JST-GH-4P Kabel für den CAN-Port, 20cm
Details

Der MATEKSYS H7A3-SLIM Flugcontroller verwendet einen STM32H7A3 MCU mit ICM42688P IMU und einem USB-C-Anschluss in einem 30,5 mm Montagemuster.

Der MATEKSYS H7A3-SLIM Flugcontroller verwendet ein kompaktes 30x30 Layout mit einem USB-C-Anschluss und klar gekennzeichneten Pads für eine ordentliche Verkabelung.

MATEKSYS H7A3-SLIM verwendet doppelte JST-SH 1.0 8-polige Anschlüsse sowie einen JST-GH 4-poligen Anschluss und USB Typ-C für eine ordentliche Verkabelung und einfache Einrichtung.

MATEKSYS H7A3-SLIM verwendet klar gekennzeichnete Lötpads und Anschlüsse für Kamera/VTx-Video, UARTs, CAN und Stromverbindungen.
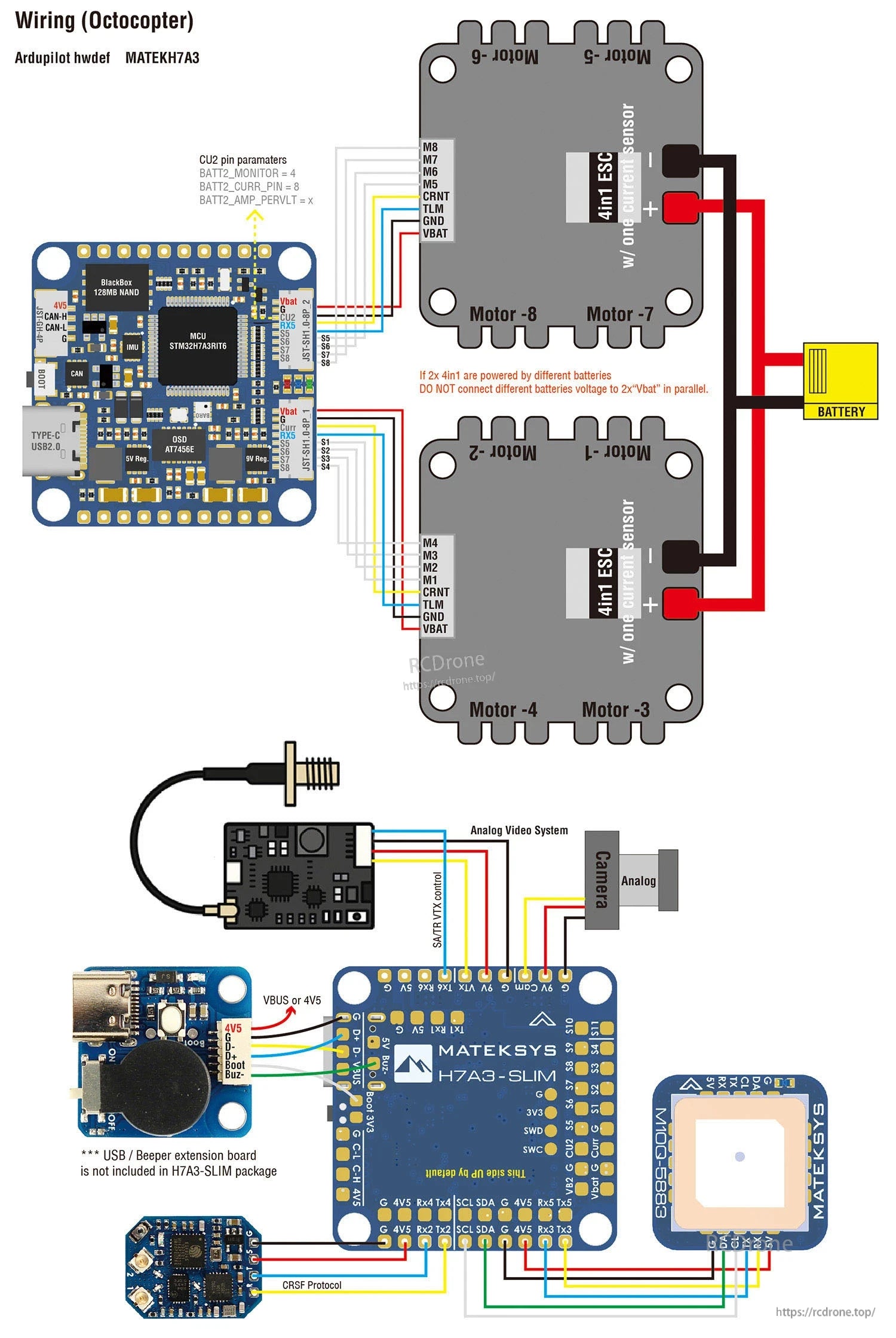
MATEKSYS H7A3-SLIM verwendet deutlich gekennzeichnete Pads zum Anschließen von dualen 4-in-1 ESCs, VBAT-Stromversorgung, GPS, Empfänger und analogen Videokomponenten.

ArduPilot Kartierung
| ArduPilot | ||||||
| PWM | S1 | PWM1 GPIO50 | 5 V tolerant I/O | TIM1_CH2 | DMA/Bi-DShot | Gruppe1 |
| S2 | PWM2 GPIO51 | 5 V tolerant I/O | TIM1_CH3 | DMA/Bi-DShot | ||
| S3 | PWM3 GPIO52 | 5 V tolerant I/O | TIM2_CH1 | DMA/Bi-DShot | Gruppe2 | |
| S4 | PWM4 GPIO53 | 5 V tolerant I/O | TIM2_CH2 | DMA/Bi-DShot | ||
| S5 | PWM5 GPIO54 | 5 V tolerant I/O | TIM3_CH3 | DMA/Bi-DShot | Gruppe3 | |
| S6 | PWM6 GPIO55 | 5 V tolerant I/O | TIM3_CH4 | DMA/Bi-DShot | ||
| S7 | PWM7 GPIO56 | 5 V tolerant I/O | TIM3_CH1 | DMA/Bi-DShot | ||
| S8 | PWM8 GPIO57 | 5 V tolerant I/O | TIM3_CH2 | DMA/Bi-DShot | ||
| S9 | PWM9 GPIO58 | 5 V tolerant I/O | TIM4_CH1 | DMA/DShot | Gruppe4 | |
| S10 | PWM10 GPIO59 | 5 V tolerant I/O | TIM4_CH2 | DMA/DShot | ||
| S11 | PWM11 GPIO60 | 5 V tolerant I/O | TIM16_CH1 | DMA/DShot | Gruppe5 | |
| PWM1~PWM11 sind Dshot- und PWM-fähig.Allerdings ist das Mischen von Dshot- und normalem PWM-Betrieb für Ausgänge auf Gruppen beschränkt, d.h. das Aktivieren von Dshot für einen Ausgang in einer Gruppe erfordert, dass ALLE Ausgänge in dieser Gruppe als Dshot konfiguriert und verwendet werden, anstatt als PWM-Ausgänge. Wenn Servo und Motor in derselben Gruppe gemischt werden, stellen Sie sicher, dass diese Gruppe die niedrigste PWM-Frequenz gemäß der Servospezifikation ausführt. Das heißt, wenn das Servo maximal 50Hz unterstützt, muss der ESC in dieser Gruppe mit 50Hz betrieben werden. |
||||||
| PINIO | 9V-Schalter | GPIO81 | RELAY1_PIN | 81 | ||
| ADC | Vbat-Pad | BATT_VOLTAGE_SENS | 6~36V | BATT_VOLT_PIN BATT_VOLT_MULT |
10 21.0 |
|
| Curr-Pad | BATT_CURRENT_SENS | 0~3.3V | BATT_CURR_PIN BATT_AMP_PERVLT |
11 X |
||
| VB2 Pad | BATT2_VOLTAGE_SENS | 0~69V | BATT2_VOLT_PIN BATT2_VOLT_MULT |
18 21.0 |
||
| CU2 Pad | BATT2_CURRENT_SENS | 0~3.3V | BATT2_CURR_PIN BATT2_AMP_PERVLT |
8 X |
||
| I2C | SCL/SDA | I2C3 | 5V-tolerante I/O | auf dem Board Baro SPL06-001 | Adresse | 0x76 |
| Digitale Geschwindigkeit I2C MS4525 DLVR-L10D |
ARSPD_BUS ARSPD_TYPE ARSPD_TYPE |
0 1 9 |
||||
| Magnetometer | COMPASS_AUTODEC | 1 | ||||
| CAN | C-H/C-L | CAN2 | 5V-tolerante I/O | CAN | CAN_D1_PROTOCOL CAN_P1_DRIVER |
1 1 |
KANN GPS KANN Kompass KANN Luftgeschwindigkeitssensor |
GPS_TYP KOMPASS_TYPMASK ARSPD_TYP |
9 0 8 |
| UART | USB | USB | Konsole | SERIAL0_PROTOKOLL | 2 | |
| TX1 RX1 | USART1 m/DMA | 5 V tolerant I/O | Telemetrie | SERIAL1_PROTOKOLL | 2 | |
| TX2 RX2 | USART2 m/DMA | 5 V tolerant I/O | RC-Eingang/Empfänger | SERIAL2_PROTOKOLL | 23 | |
| TX3 RX3 | USART3 m/DMA | 5 V tolerant I/O | GPS | SERIAL3_PROTOCOL | 5 | |
| TX4 RX4 | UART4 ohne DMA | 5 V tolerant I/O | Ersatz | SERIAL4_PROTOCOL | -1 | |
| TX5 RX5 | UART5 ohne DMA | 5 V tolerant I/O | Ersatz | SERIAL5_PROTOCOL | -1 | |
| TX6 RX6 | USART6 ohne DMA | 5 V tolerant I/O | Ersatz | SERIAL6_PROTOCOL | -1 | |
RC EINGANG
Der RC-Eingang ist auf dem USART2 (SERIAL2) konfiguriert.Es unterstützt alle seriellen RC-Protokolle. SERIAL2_PROTOCOL=23 standardmäßig.
- PPM wird nicht unterstützt.
- CRSF erfordert eine Verbindung zu Tx2 & Rx2 und setze SERIAL2_OPTIONS auf „0“ (Standard).
- SBUS/DSM/SRXL wird an den Rx2-Pin angeschlossen, aber SBUS erfordert, dass die SERIAL2_OPTIONS auf „3“ gesetzt werden.
- FPort erfordert eine Verbindung zu Tx2 und setze SERIAL2_OPTIONS auf „7“. Wenn die Telemetrie nicht funktioniert, versuche set SERIAL7_OPTIONS = 135.
- SRXL2 erfordert eine Verbindung zu Tx2 und bietet automatisch Telemetrie. Setze SERIAL2_OPTIONS auf „4“.
- Jeder UART kann auch für RC-Systemverbindungen in ArduPilot verwendet werden und ist mit allen Protokollen außer PPM kompatibel. Siehe Funksteuerungssysteme für Details.
ArduPilot Relais(PINIO)
- 9V-Ausgang standardmäßig EIN
- PC13 PINIO1 AUSGANG GPIO(81) //9V Strom switche.g.
- RELAIS1_FUNKTION 1
- RELAIS1_PIN 81 // PINIO1 GPIO
- RC7_OPTION 28 //Relais Ein/Aus, Verwenden Sie CH7 des Senders, um 9V EIN/AUS zu setzen
Die konfigurierte Funktion wird aktiviert, wenn der pwm-Wert des Hilfsschalters höher als 1800 wird. Sie wird deaktiviert, wenn der Wert unter 1200 fällt.
Überprüfen Sie den pwm-Wert, der vom Sender gesendet wird, wenn der Schalter hoch und niedrig ist, indem Sie den Bildschirm für die Ersteinrichtung des Mission Planner >> Pflichthardware >> Radio-Kalibrierung verwenden.Wenn es nicht höher als 1800 oder niedriger als 1200 steigt, ist es am besten, die Servo-Endpunkte im Sender anzupassen.
Related Collections


