

MUWEIDU K12060 Motor 24V 60W Bürstenloser DC FOC Servomotor mit 18-Bit-Encoder, RS485/CAN, 115 U/min
MUWEIDU K12060 Motor 24V 60W Bürstenloser DC FOC Servomotor mit 18-Bit-Encoder, RS485/CAN, 115 U/min
MUWEIDU
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
MUWEIDU K12060 Motor ist ein bürstenloser Gleichstrom Servomotor (K-Serie bürstenloser Gleichstrommotor mit mittlerer bis hoher Geschwindigkeit) mit integriertem elektrischen Antrieb (eingebauter Treiber) und einem magnetischen Encoder. Er unterstützt Geschwindigkeits-/Positionsregelung und RS485- oder CAN-Kommunikation und ist für kompakte, integrierte Roboter- und Automatisierungsgelenke konzipiert.
Hauptmerkmale
- Hochleistungs-FOC-Servomotor
- Integriertes elektrisches Antriebsdesign: integrierter Treiber und magnetischer Encoder
- Integriertes / leichtes / hochpräzises / hohes Drehmoment-Design
- Encoder-Präzision von 14-Bit auf 18-Bit aufgerüstet
- Optimiertes Motor-Ruckmoment
- PWM-Eingang unterstützt
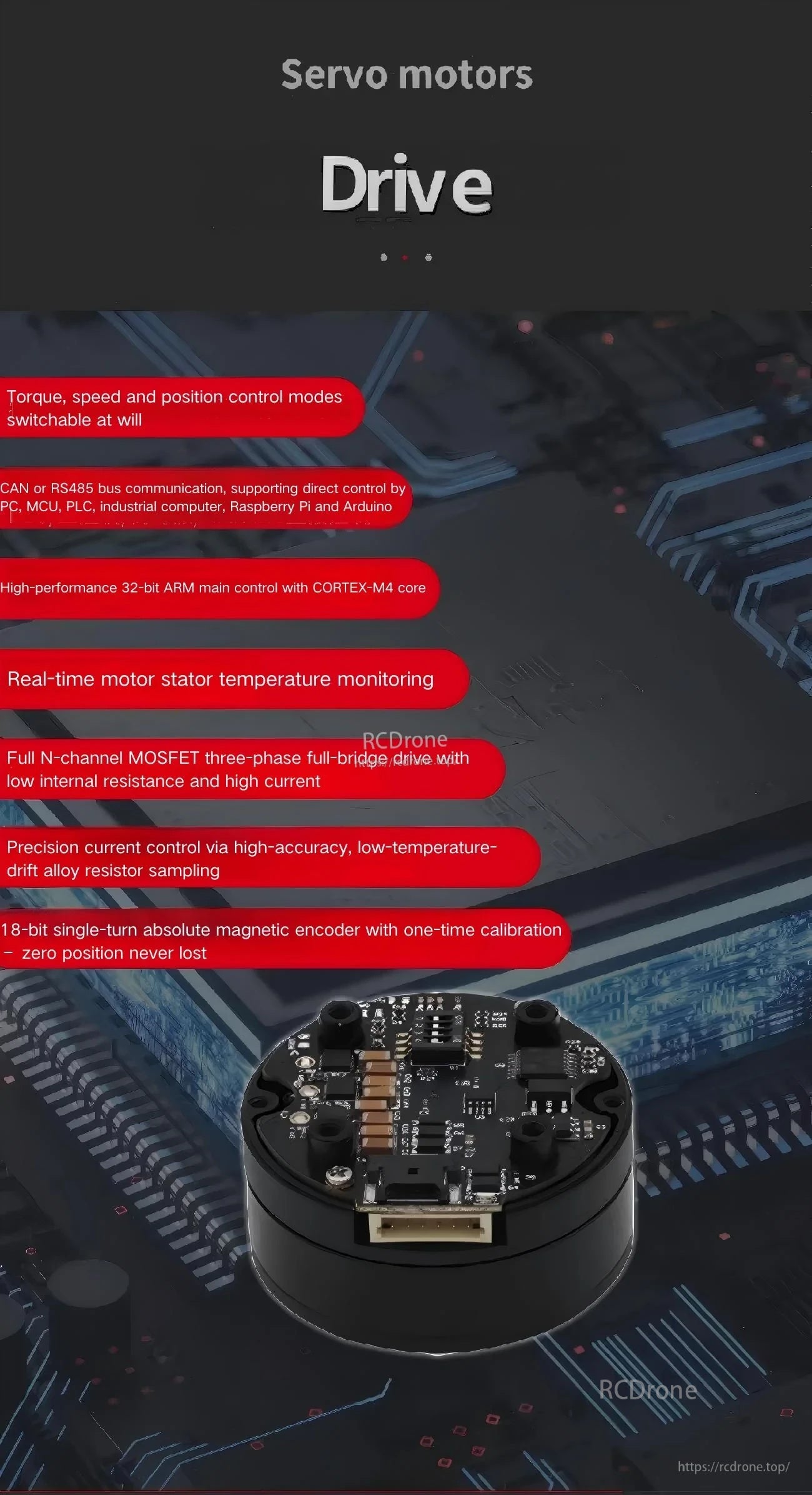
- Drehmoment-, Geschwindigkeits- und Positionsregelungsmodi nach Belieben umschaltbar
- CAN- oder RS485-Buskommunikation; unterstützt die direkte Steuerung durch PC, MCU, PLC, Industriecomputer, Raspberry Pi und Arduino
- Hochleistungs-32-Bit-ARM-Hauptsteuerung mit CORTEX-M4-Kern
- Echtzeit-Überwachung der Stator-Temperatur des Motors
- Vollständiger N-Kanal-MOSFET-Dreiphasen-Vollbrückenantrieb mit niedrigem Innenwiderstand und hohem Strom
- Präzise Stromregelung über hochgenaue, temperaturstabile Legierungswiderstandsmessung
- 18-Bit-Einzelumdrehungs-Absolute-Magnetencoder mit einmaliger Kalibrierung; Nullposition geht niemals verloren
- Leichtes Design: flache Struktur aus Aluminium in Luftfahrtqualität
- Hohe Drehmomentausgabe: Außenrotor kombiniert mit Neodym-Eisen-Bor-Magneten
- Ultra-hochstandardisierte Produktgestaltung
Technische Daten
| Modell | K12060 |
| Nennspannung | 24V |
| Nennstrom | 4A |
| Spitzenleistung | 60W |
| Nennmoment | 5N.m |
| Maximales Drehmoment | 10N.m |
| Bewertete Geschwindigkeit | 115 U/min |
| Encoder | 18 Bit |
| Rotormoment | 5500 gcm^2 |
| Motor Temperaturüberwachung | JA |
| Steuermodi | Geschwindigkeit/Position |
| Kommunikationsprotokoll | RS485 oder CAN |
| Gesamtabmessungen | Phi120mm x 49mm |
| Gewicht | 1147 g |
Schnittstellendefinition
- ID SCHALTER
- CAN/RS485
| B/L | RS485-B oder CAN-L |
| A/H | RS485-A oder CAN-H |
| V- | Negative Stromversorgung |
| V- | Negative Stromversorgung |
| V+ | Positive Stromversorgung |
| V+ | Positive Stromversorgung |
| T | UART-Transmitter |
| R | UART-Empfänger |
| G | Signal GND |
Anwendungen
- Humanoide Roboter
- Roboterarme
- Exoskelette
- Quadruped-Roboter
- AGV-Fahrzeuge
- ARU-Roboter
- Inspektionsroboter
- Handheld-Kamera
- LiDAR
- Gimbal-Pod
Für Integrationsanleitungen und Fragen vor dem Verkauf (Kommunikationsverkabelung, Steuerungsmodi und Dokumentation) kontaktieren Sie [email protected] or besuchen Sie https://rcdrone.top/ .
Handbücher
Details

Ein kompakter K-Serie FOC Servomotor, der für integrierte Robotergelenke entwickelt wurde und Motor,, Treiber und Encoder in einem Gehäuse vereint.

Das integrierte elektrische Antriebsdesign reduziert die Verkabelung und spart Platz, indem es Motor, Treiberelektronik und magnetischen Encoder kombiniert.
Wechseln Sie zwischen Drehmoment-, Geschwindigkeits- und Positionsregelung, mit CAN- oder RS485-Kommunikation für PC, MCU, PLC oder eingebettete Steuerungen.

Die klare Schnittstellenbeschriftung umfasst einen ID-Schalter und dedizierte Pins für Stromversorgung, CAN/RS485-Bus und UART-Signalverbindungen.

PC-basierte Werkzeuge unterstützen die Parametereinstellung, Tests und Firmware-Updates über mehrere Steuerungsmodi.

Gut geeignet für Automatisierungs- und Robotikanwendungen wie Inspektionsplattformen, Kamerastabilisierung, LiDAR und Gimbal-Pods.
Related Collections

