

MUWEIDU K4028 Motor 12V FOC Servo bürstenloser Gleichstrommotor, 18-Bit-Encoder, RS485/CAN, 560 U/min
MUWEIDU K4028 Motor 12V FOC Servo bürstenloser Gleichstrommotor, 18-Bit-Encoder, RS485/CAN, 560 U/min
MUWEIDU
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
MUWEIDU K4028 Motor ist ein K-Serie Mittel- bis Hochgeschwindigkeits- bürstenloser Gleichstrommotor, der als Hochleistungs-FOC Servomotor mit einem integrierten elektrischen Antriebskonzept konzipiert wurde. Er ist mit einem 18-Bit-Encoder spezifiziert, unterstützt Geschwindigkeits-/Positionskontrolle und kommuniziert über RS485 oder CAN zur Integration in Robotik- und Automatisierungssysteme.
Hauptmerkmale
- K-Serie bürstenloser Gleichstrommotor mit mittlerer bis hoher Geschwindigkeit; Hochleistungs-FOC-Servomotor
- Integriertes elektrisches Antriebsdesign; integrierter Treiber und magnetischer Encoder
- Integriertes Motor + Treiber-Design
- Leichtes, flaches Design aus Aluminium in Luftfahrtqualität
- Hohe Drehmomentabgabe; Außenrotor kombiniert mit Neodym-Eisen-Bor-Magneten
- Motorüberwachungstemperatur: JA
- Mehrere angezeigte Steuerungsmodi: Drehmomentmodus, Geschwindigkeitsmodus, Mehrdrehungssteuerungsmodus (mit Geschwindigkeitsbegrenzung), Einzeldrehungspositions- + Richtungsmodus (mit Geschwindigkeitsbegrenzung), Inkrementeller Positionsmodus (mit Geschwindigkeitsbegrenzung)
- PC-basierte Parametereinstellung / Testen / Firmware-Upgrade verfügbar
- Kompatibel mit Open-Source-Entwicklungsplattformen einschließlich PC, MCU, PLC, Industriecomputer und Raspberry Pi
- Mehrschichtige Schutzmechanismen; Bremsfunktion reserviert (Bremse / Bremsfreigabe)
- PWM-Eingang unterstützt
- Optimiertes Motor-Ruckmoment
- Encoder-Präzisions-Upgrade-Hinweis: von 14-Bit auf 18-Bit
Technische Daten
| Modell | K4028 |
| Nennspannung | 12V |
| Nennstrom | 1.43A |
| Spitzenleistung | 8.9W |
| Nennmoment | 0.15 N.m |
| Spitzenmoment | 0.33 N.m |
| Nennspeed | 560 U/min |
| Encoder | 18bit |
| Rotormasse | 81 gcm² |
| Motor Temperaturüberwachung | JA |
| Steuermodi | Geschwindigkeit/Position |
| Kommunikationsprotokoll | RS485 oder CAN |
| Gesamtabmessungen | Φ39.6mm × 28mm |
| Gewicht | 90 g |
Schnittstellendefinition (CAN/RS485)
| Schnittstelle | Hinweis |
|---|---|
| B/L | RS485-B oder CAN-L |
| A/H | RS485-A oder CAN-H |
| V- | Negative Stromversorgung |
| V- | Negative Stromversorgung |
| V+ | Positive Stromversorgung |
| V+ | Positive Stromversorgung |
| T | UART-Transmitter |
| R | UART-Empfänger |
| G | Signal GND |
ID-Schalter ist am Motor zur Identifizierung/Einstellung vorhanden.
Anwendungen
- Humanoide Roboter
- Roboterarme
- Exoskelette
- Quadruped-Roboter
- AGV-Fahrzeuge
- ARU-Roboter
- Inspektionsrobotersysteme
- Handheld-Kamerasysteme
- LiDAR-bezogene Plattformen
- Gimbal-Pod-Systeme
Handbücher / Dokumente
Für Auswahlberatung oder Integrationsunterstützung für den MUWEIDU K4028 Motor (RS485/CAN) kontaktieren Sie [email protected] or besuchen Sie https://rcdrone.top/.
Details

Der K4028 basiert auf einem integrierten elektrischen Antriebskonzept und kombiniert einen kompakten BLDC-Motor, Treiber und Encoder für präzise Servosteuerung.
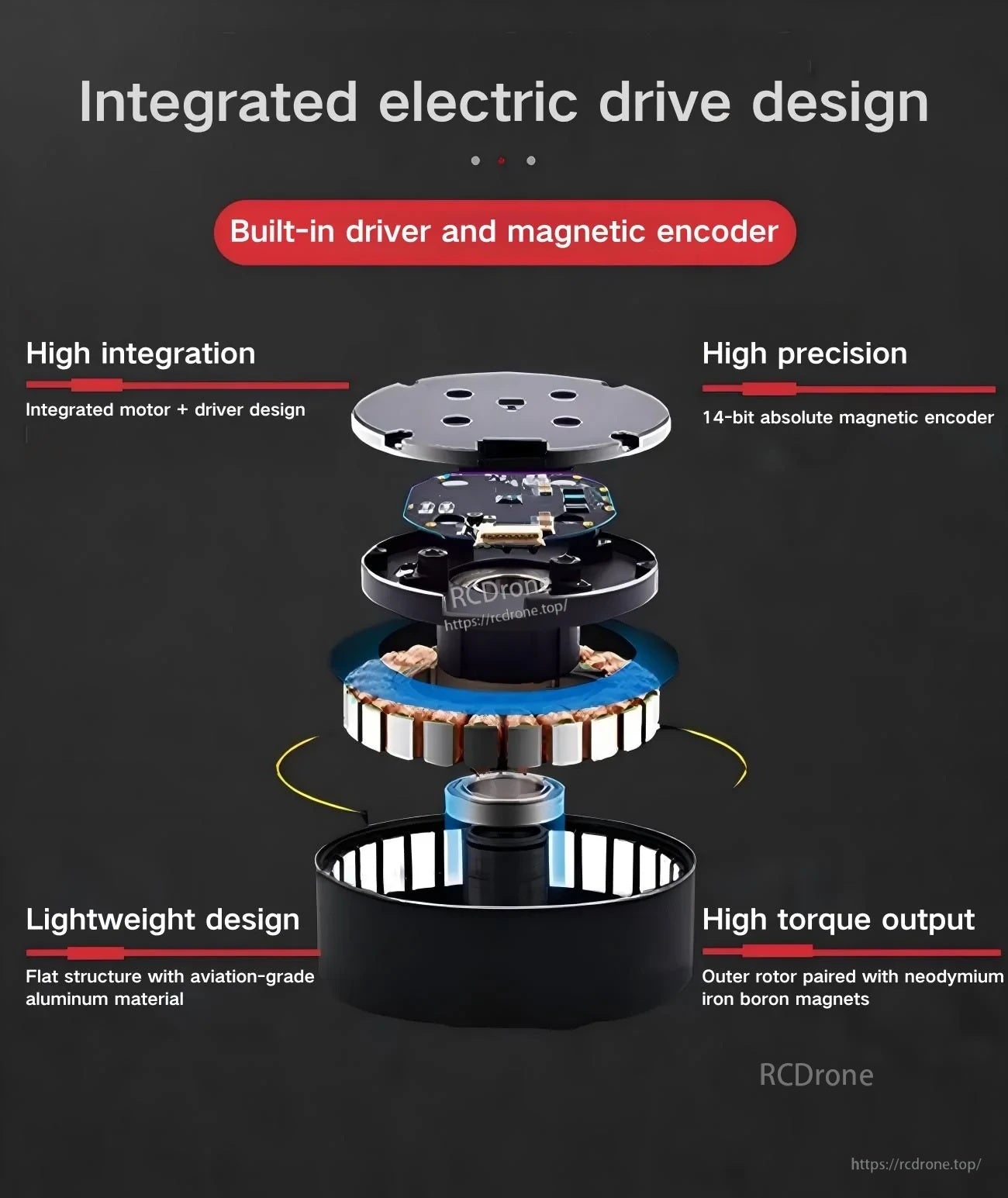
Ein All-in-One-Motor + Treiber-Stapel hilft, die Verkabelung zu reduzieren und die Integration in Robotik- und Automatisierungsanwendungen zu vereinfachen.

Die klare Schnittstellenbeschriftung unterstützt eine schnelle Einrichtung für RS485- oder CAN-Kommunikation, mit einem ID-Schalter zur Geräteidentifikation im Bus.
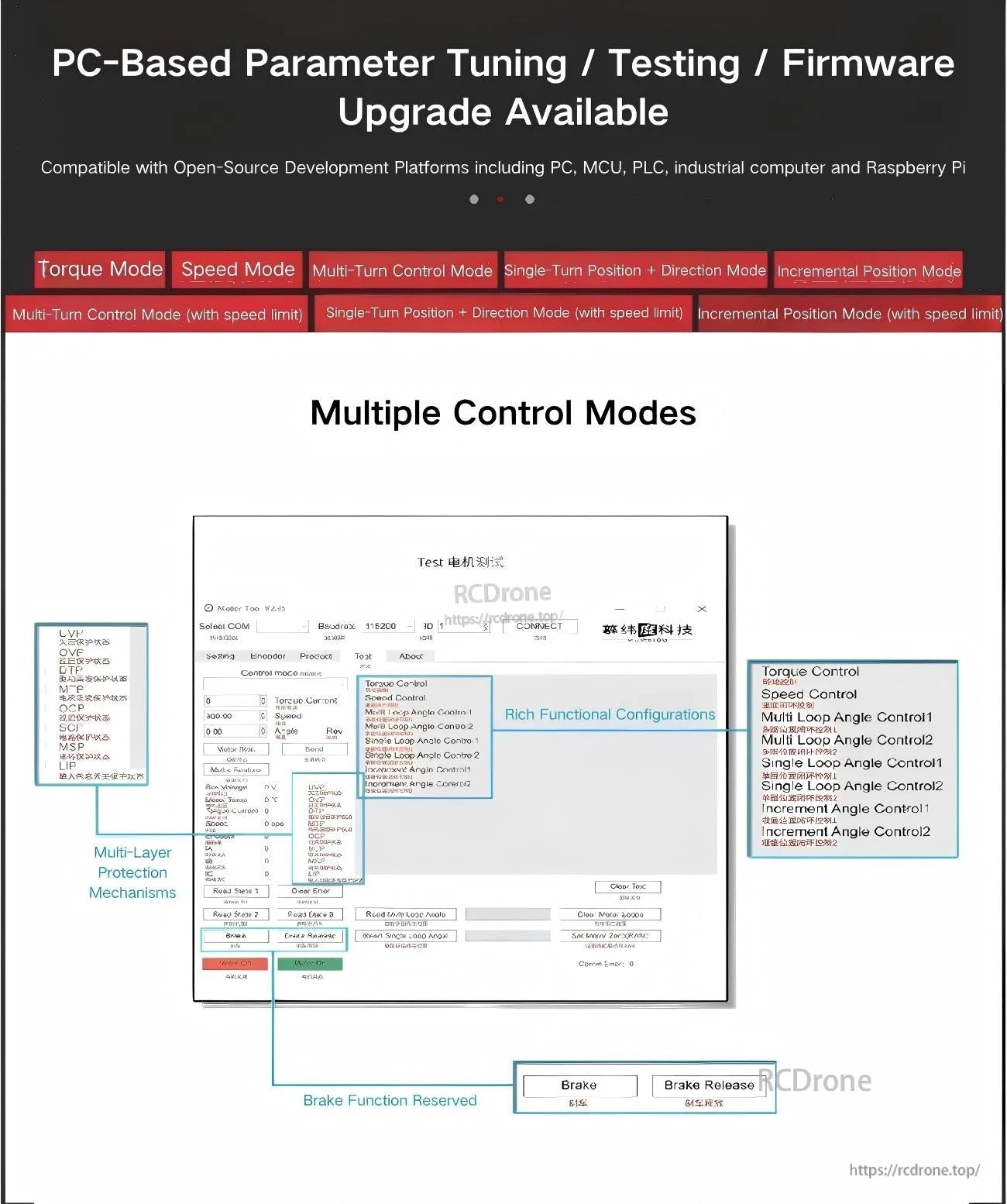
PC-Tools ermöglichen die Parametrierung, Tests und Firmware-Updates, mit mehreren Drehmoment-, Geschwindigkeits- und Positionsregelungsmodi verfügbar.
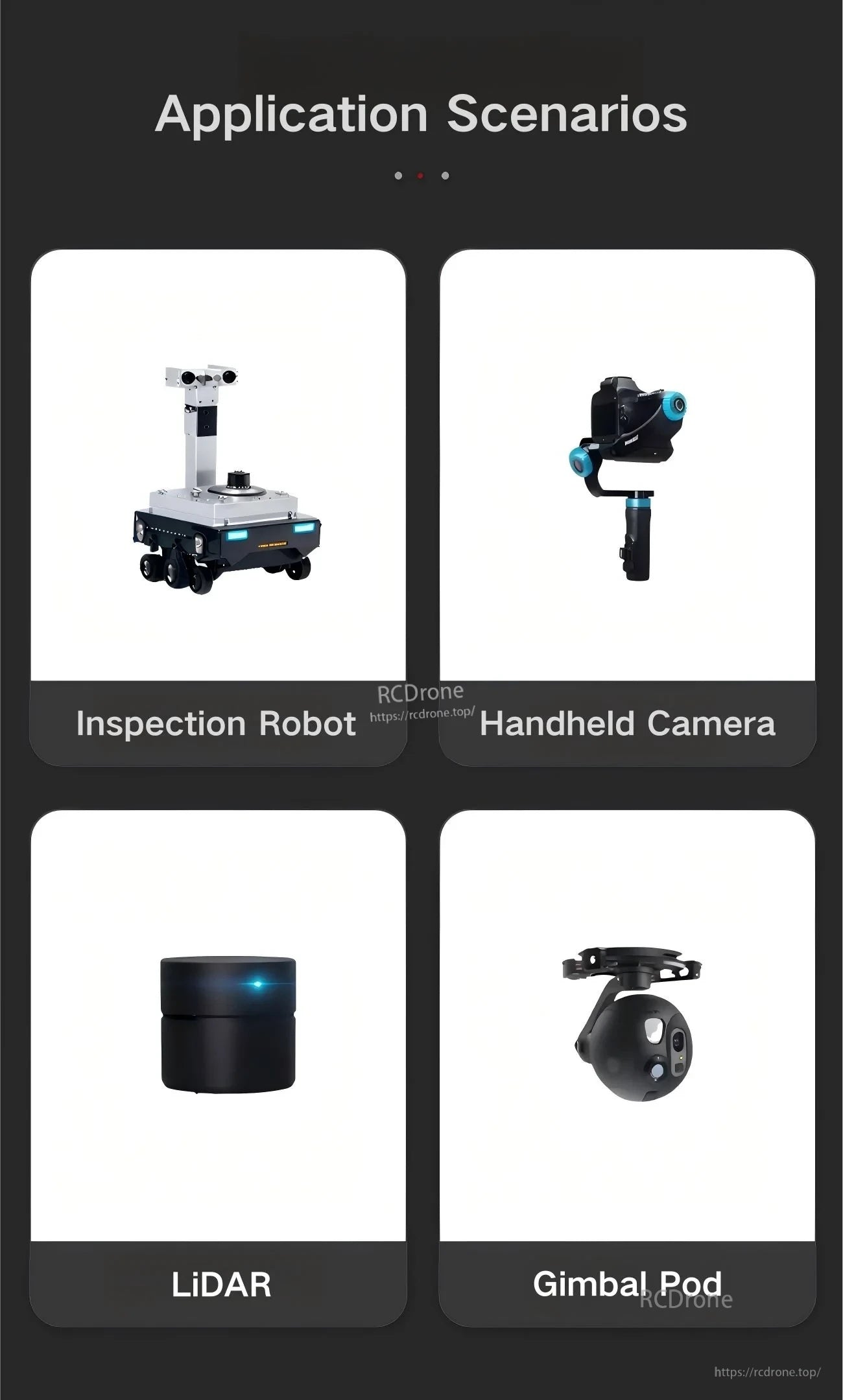
Gut geeignet für kompakte Bewegungssteuerungsaufgaben wie Inspektionsroboter, Gimbals und LiDAR-bezogene Plattformen.
Related Collections

