

MUWEIDU K4030 Motor Servomotor 16V 750 U/min 0,65N.m Spitzendrehmoment 18bit Encoder RS485/CAN
MUWEIDU K4030 Motor Servomotor 16V 750 U/min 0,65N.m Spitzendrehmoment 18bit Encoder RS485/CAN
MUWEIDU
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
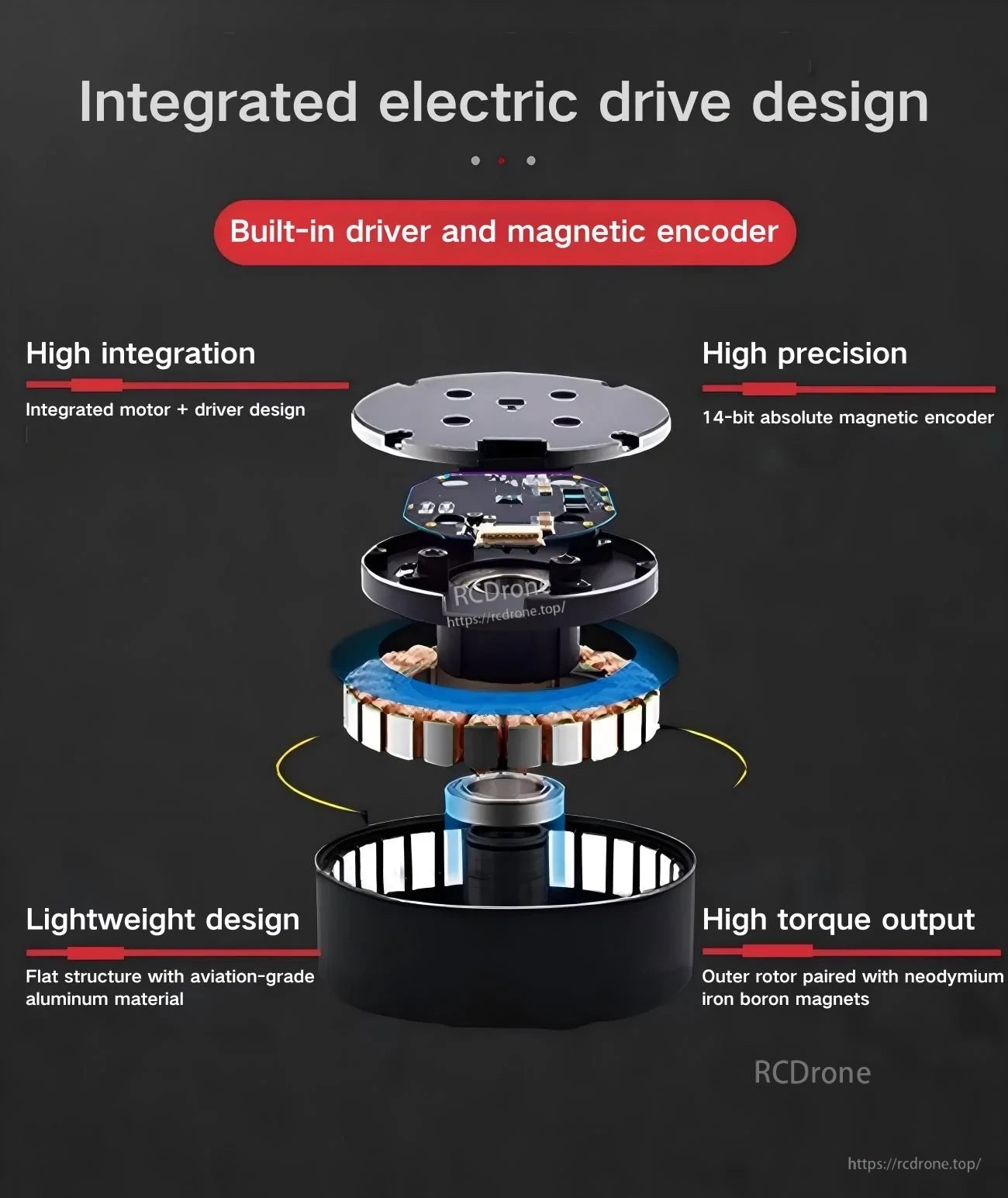
MUWEIDU K4030 Motor ist ein K-Serie Mittel- bis Hochgeschwindigkeits- bürstenloser Gleichstrommotor (Servomotor) mit einem integrierten elektrischen Antriebsdesign (eingebauter Treiber und magnetischer Encoder). Er unterstützt Geschwindigkeits-/Positionskontrolle und kommuniziert über RS485 oder CAN, was ihn für kompakte Roboter- und mechatronische Aktuatoren geeignet macht.
Hauptmerkmale
- Hochleistungs-FOC-Servomotor
- Integriertes Motor- + Treiberdesign
- Integrierter Treiber und magnetischer Encoder
- Encoder-Präzision von 14-Bit auf 18-Bit verbessert
- Optimiertes Motor-Ruckmoment
- PWM-Eingang unterstützt
- Ultra-hochwertiges Produktdesign
- PC-basierte Parametereinstellung / Testen / Firmware-Upgrade verfügbar
- Kompatibel mit Open-Source-Entwicklungsplattformen einschließlich PC, MCU, PLC, Industriecomputer und Raspberry Pi
- Mehrere Steuerungsmodi angezeigt: Drehmomentmodus, Geschwindigkeitsmodus, Mehrdrehungssteuerungsmodus (mit Geschwindigkeitsbegrenzung), Einzeldrehungspositions- + Richtungsmodus (mit Geschwindigkeitsbegrenzung), Inkrementeller Positionsmodus (mit Geschwindigkeitsbegrenzung)
- Mehrschichtige Schutzmechanismen (Software-UI-Funktionstext)
- Bremsefunktion reserviert (Software-UI-Funktionstext)
Anwendungen
- Humanoide Roboter
- Roboterarme
- Exoskelette
- Quadruped-Roboter
- AGV-Fahrzeuge
- ARU-Roboter
- Inspektionsroboter
- Handkamera
- LiDAR
- Gimbal/Pod
Technische Daten
| Modell | K4030 |
| Nennspannung | 16V |
| Nennstrom | 2.2A |
| Spitzenleistung | 22W |
| Nennmoment | 0.25N.m |
| Spitzenmoment | 0.65N.m |
| Nennspeed | 750rpm |
| Encoder | 18bit |
| Rotormasse | 81gcm^2 |
| Motor Temperaturüberwachung | JA |
| Steuermodi | Geschwindigkeit/Position |
| Kommunikationsprotokoll | RS485 oder CAN |
| Gesamtabmessungen | Phi39.6mm x 23mm |
| Gewicht | 65g |
Schnittstelle / Pin-Definition
Schnittstellenbezeichnungen angezeigt: ID SCHALTER, CAN/RS485.
| Schnittstelle | Hinweis |
|---|---|
| B/L | RS485-B oder CAN-L |
| A/H | RS485-A oder CAN-H |
| V- | Negative Stromversorgung |
| V- | Negative Stromversorgung |
| V+ | Positive Stromversorgung |
| V+ | Positive Stromversorgung |
| T | UART-Sender |
| R | UART-Empfänger |
| G | Signal GND |
Handbücher
Für Auswahlberatung oder Integrationsunterstützung (RS485/CAN Verkabelung, Steuerungsmodus-Einrichtung oder Dokumentationsfragen) kontaktieren Sie den Support unter https://rcdrone.top/ oder per E-Mail [email protected].
Details

Ein kompakter K-Serie Servomotor mit integrierter Antriebselektronik für Hochleistungsdrehmoment, Geschwindigkeit und Positionskontrolle.
Integrierter Motor, Treiber und magnetischer Encoder helfen, die Verkabelung zu reduzieren und kompakte robotische Aktuatoren zu vereinfachen.

Klare Schnittstellenbeschriftungen erleichtern das Verkabeln der Stromversorgung und die Einrichtung der RS485- oder CAN-Kommunikation während der Integration.

PC-basierte Abstimmung und Tests unterstützen mehrere Steuerungsmodi, mit Firmware-Upgrade und Schutzfunktionen, die in der Software verfügbar sind.
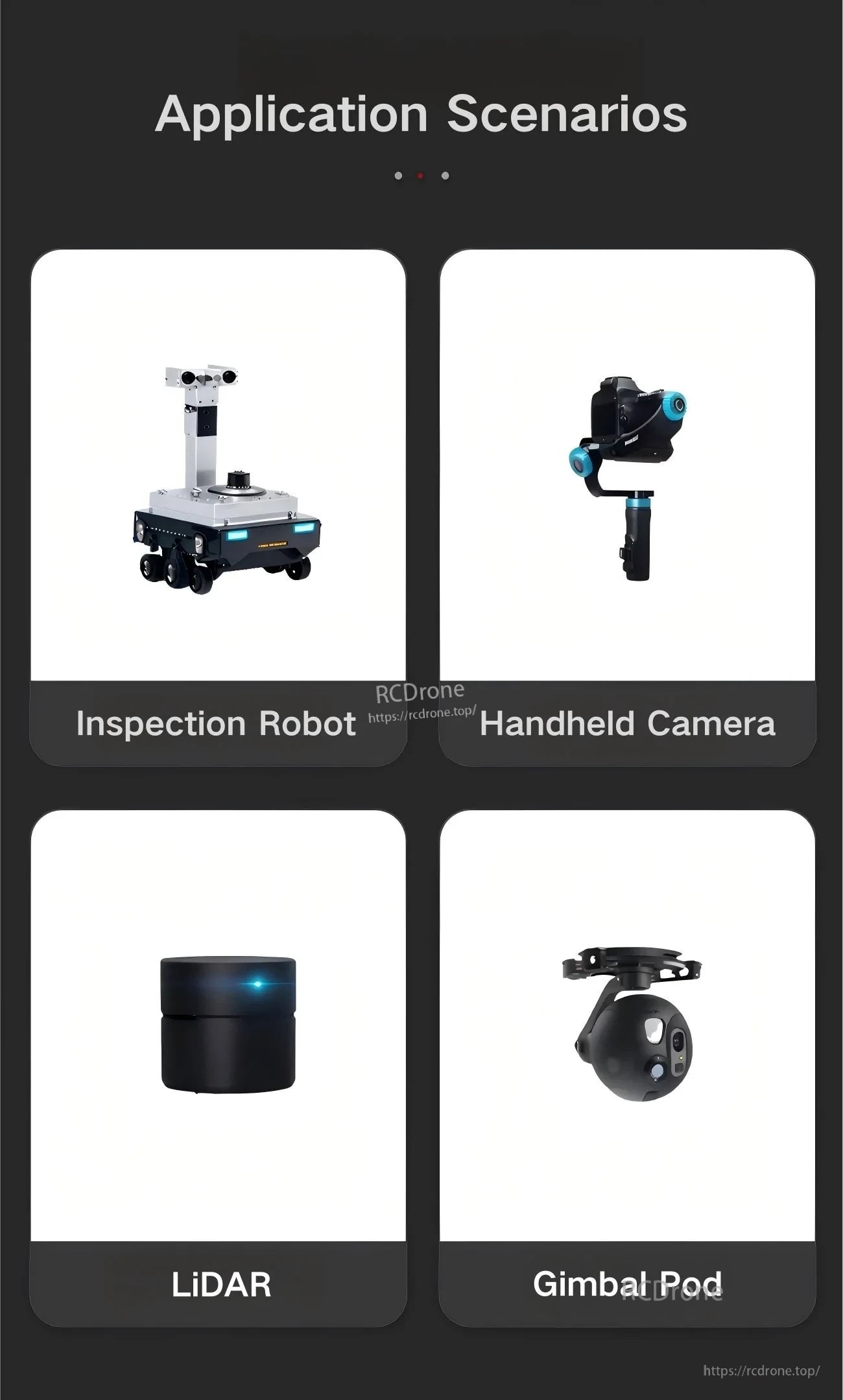
Eignet sich für Robotik- und Stabilisationsprojekte wie Inspektionsplattformen, Gimbals und Sensorlasten.
Related Collections

