

MUWEIDU K7030 Motor 24V bürstenloser DC FOC-Servomotor, 18-Bit-Encoder, RS485/CAN, Φ69×33,9mm
MUWEIDU K7030 Motor 24V bürstenloser DC FOC-Servomotor, 18-Bit-Encoder, RS485/CAN, Φ69×33,9mm
MUWEIDU
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
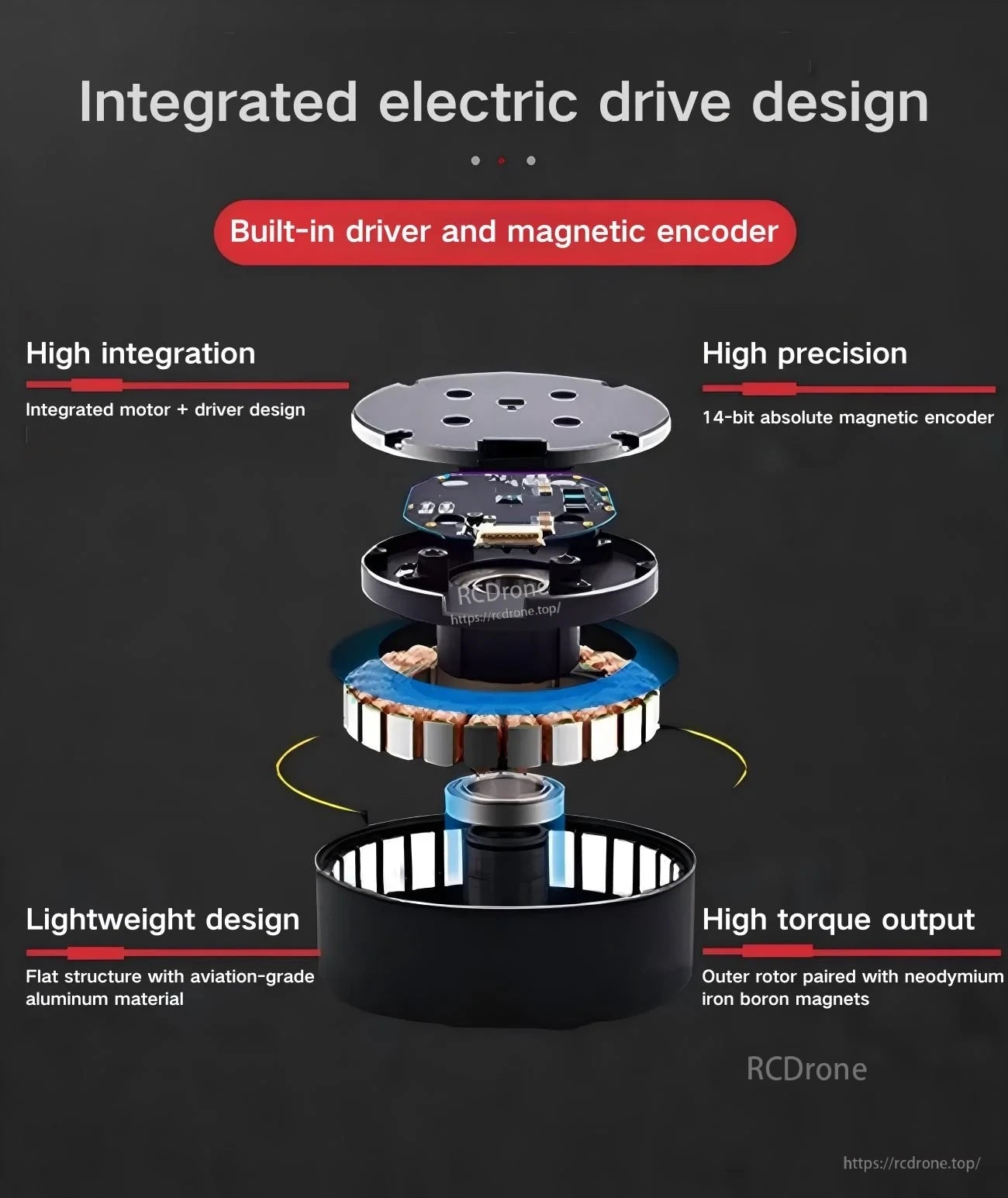
Der MUWEIDU K7030 Motor ist ein K-Serie Mittel- bis Hochgeschwindigkeits- bürstenloser Gleichstrommotor , der als Hochleistungs-FOC-Servomotor mit einem integrierten elektrischen Antriebskonzept entwickelt wurde. Er verfügt über ein integriertes Motor- + Treiberdesign und einen eingebauten magnetischen Encoder, der Geschwindigkeits-/Positionskontrolle sowie PC-basiertes Parametertuning, Testen und Firmware-Updates unterstützt.
Hauptmerkmale
- Hochleistungs-FOC-Servomotor
- Integriertes elektrisches Antriebsdesign: integrierter Treiber und magnetischer Encoder
- Integriertes, leichtes, hochpräzises, hochtorques Design
- Encoder-Präzision von 14-Bit auf 18-Bit aufgerüstet
- Optimiertes Motor-Ruckmoment
- PWM-Eingang unterstützt
- Hohe Drehmomentausgabe: Außenrotor kombiniert mit Neodym-Eisen-Bor-Magneten
- Leichtes Design: flache Struktur mit Aluminiummaterial in Luftfahrtqualität
- PC-basierte Parametereinstellung / Test / Firmware-Upgrade verfügbar
- Kompatibel mit Open-Source-Entwicklungsplattformen einschließlich PC, MCU, PLC, Industriecomputer und Raspberry Pi
- Mehrere Steuerungsmodi: Drehmomentmodus, Geschwindigkeitsmodus, Mehrdrehungssteuerungsmodus, Einzeldrehungspositions- + Richtungsmodus, inkrementeller Positionsmodus
- Multi-Turn Steuerungsmodus (mit Geschwindigkeitsbegrenzung); Single-Turn Positions- + Richtungsmodus (mit Geschwindigkeitsbegrenzung); Inkrementeller Positionsmodus (mit Geschwindigkeitsbegrenzung)
Technische Daten
| Modell | K7030 (10/23/45T) |
| Nennspannung | 24V |
| Nennstrom | 8.3A / 3.62A / 1.93A |
| Spitzenleistung | 330W / 75W / 24.5W |
| Nennmoment | 1 N.m / 1 N.m / 0.99 N.m |
| Spitzenmoment | 2 N.m / 3.8 N.m / 2.42 N.m |
| Nennspeed | 1500 U/min / 580 U/min / 220 U/min |
| Encoder | 18 Bit |
| Rotormasse | 933 gcm² |
| Motor Temperaturüberwachung | JA |
| Steuermodi | Geschwindigkeit / Position |
| Kommunikationsprotokoll | RS485 oder CAN |
| Gesamtabmessungen | Φ69mm × 33.9mm |
| Gewicht | 352g |
Schnittstellendefinition (CAN/RS485)
| Schnittstelle | Hinweis |
|---|---|
| B/L | RS485-B oder CAN-L |
| A/H | RS485-A oder CAN-H |
| V- | Negative Stromversorgung |
| V- | Negative Stromversorgung |
| V+ | Positive Stromversorgung |
| V+ | Positive Stromversorgung |
| T | UART-Sender |
| R | UART-Empfänger |
| G | Signal GND |
Für Verdrahtungsanleitungen, Integrationshinweise oder Fragen vor dem Kauf, kontaktieren Sie [email protected] or besuchen Sie https://rcdrone.top/.
Anwendungen
- Humanoide Roboter
- Roboterarme
- Exoskelette
- Quadruped-Roboter
- AGV-Fahrzeuge
- ARU-Roboter
- Inspektionsroboter
- Handkamera
- LiDAR
- Gimbal-Pod
Handbücher
Details

Ein kompakter 24V FOC Servomotor, der für präzise Geschwindigkeits- und Positionskontrolle in Robotik- und Bewegungssteuerungsprojekten entwickelt wurde.
Integriertes Motor-, Treiber- und magnetisches Encoder-Design hilft, die Verkabelung zu reduzieren und die Installation zu vereinfachen.

Klare CAN/RS485-Schnittstellenbeschriftung und ein integrierter ID-Schalter unterstützen die Verkabelung von Mehrknoten-Systemen.
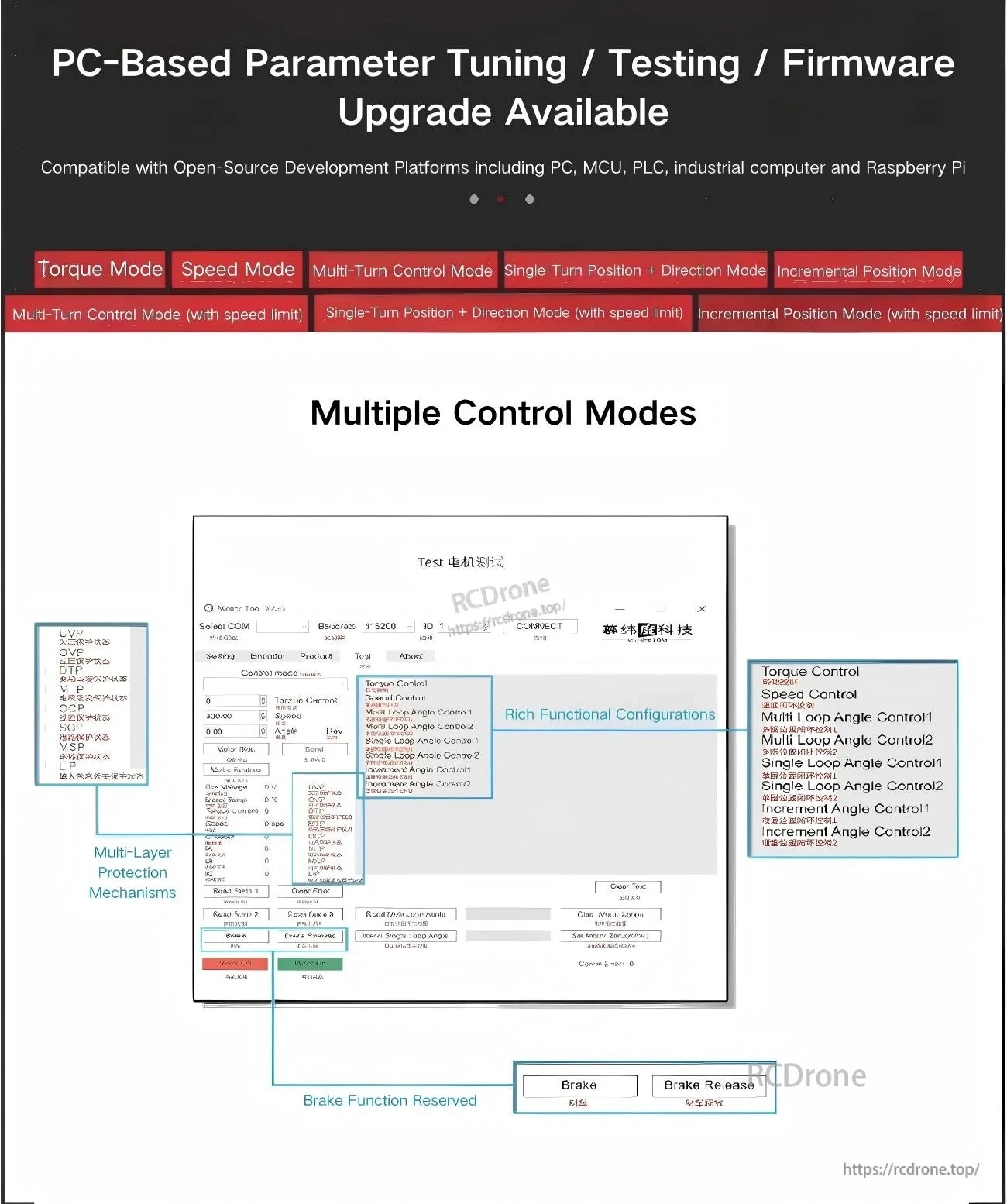
PC-basierte Werkzeuge ermöglichen die Parametrierung, das Testen und Firmware-Updates in den Modi Drehmoment, Geschwindigkeit und Position.

Related Collections

