

MUWEIDU K7050 Motor 24V bürstenloser DC FOC-Servomotor, 18-Bit-Encoder, RS485/CAN, Φ69×46mm
MUWEIDU K7050 Motor 24V bürstenloser DC FOC-Servomotor, 18-Bit-Encoder, RS485/CAN, Φ69×46mm
MUWEIDU
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Der MUWEIDU K7050 Motor ist ein bürstenloser Gleichstrommotor der K-Serie mit mittlerer bis hoher Geschwindigkeit, der als Hochleistungs-FOC Servomotor mit integriertem elektrischen Antrieb konzipiert ist. Er verfügt über einen integrierten Treiber und einen magnetischen Encoder, unterstützt die Geschwindigkeits-/Positionsregelung und bietet RS485- oder CAN-Kommunikation für Robotik- und Automatisierungsprojekte.
Hauptmerkmale
- Hochleistungs-FOC-Servomotor
- Integriertes elektrisches Antriebsdesign: integrierter Treiber und magnetischer Encoder
- Integriertes, leichtes, hochpräzises, hochtorques Design
- Encoder-Präzision von 14-Bit auf 18-Bit aufgerüstet
- Optimiertes Motor-Ruckmoment
- PWM-Eingang unterstützt
- PC-basierte Parametrierung / Testen / Firmware-Upgrade verfügbar
- Kompatibel mit Open-Source-Entwicklungsplattformen einschließlich PC, MCU, PLC, Industriecomputer und Raspberry Pi
- Mehrere Steuerungsmodi angezeigt: Drehmomentmodus, Geschwindigkeitsmodus, Mehrdrehungssteuerungsmodus, Einzeldrehungspositions- + Richtungsmodus, Inkrementeller Positionsmodus
- Mehrschichtige Schutzmechanismen (angezeigt)
- Bremsefunktion reserviert (angezeigt); Bremse / Bremsfreigabe
Technische Daten
| Modell | K7050 (10/28/45T) | Bewertete Spannung | 24V |
| Bewerteter Strom | 8.9A / 3.36A / 2A |
| Spitzenleistung | 278W / 44W / 17.5W |
| Nennmoment | 1.6 N.m / 1.6 N.m / 1.5 N.m |
| Spitzenmoment | 2.1 N.m / 2.9 N.m / 2.7 N.m |
| Bewertete Geschwindigkeit | 970 U/min / 250 U/min / 100 U/min |
| Encoder | 18bit |
| Rotormasse | 1040 gcm² |
| Motor Temperaturüberwachung | JA |
| Steuermodi | Geschwindigkeit/Position |
| Kommunikationsprotokoll | RS485 oder CAN |
| Gesamtabmessungen | Φ69mm×46mm |
| Gewicht | 526g |
Schnittstellendefinition
- ID SCHALTER
- CAN/RS485
| B/L | RS485-B oder CAN-L |
| A/H | RS485-A oder CAN-H |
| V- | Negative Stromversorgung |
| V- | Negative Stromversorgung |
| V+ | Positive Stromversorgung |
| V+ | Positive Stromversorgung |
| T | UART-Sender |
| R | UART-Empfänger |
| G | Signal GND |
Anwendungen
- Humanoide Roboter
- Roboterarme
- Exoskelette
- Quadruped-Roboter
- AGV-Fahrzeuge
- ARU-Roboter
- Inspektionsroboter
- Handheld-Kamera
- LiDAR
- Gimbal-Pod
Handbücher
Für Fragen zur Verkabelung, Integration oder Dokumentation kontaktieren Sie den Support unter [email protected] or besuchen Sie https://rcdrone.top/.
Details

Als kompakter FOC-Servomotor konzipiert, integriert der K7050 den Antrieb und den Encoder für eine saubere, hochpräzise Bewegungssteuerung.
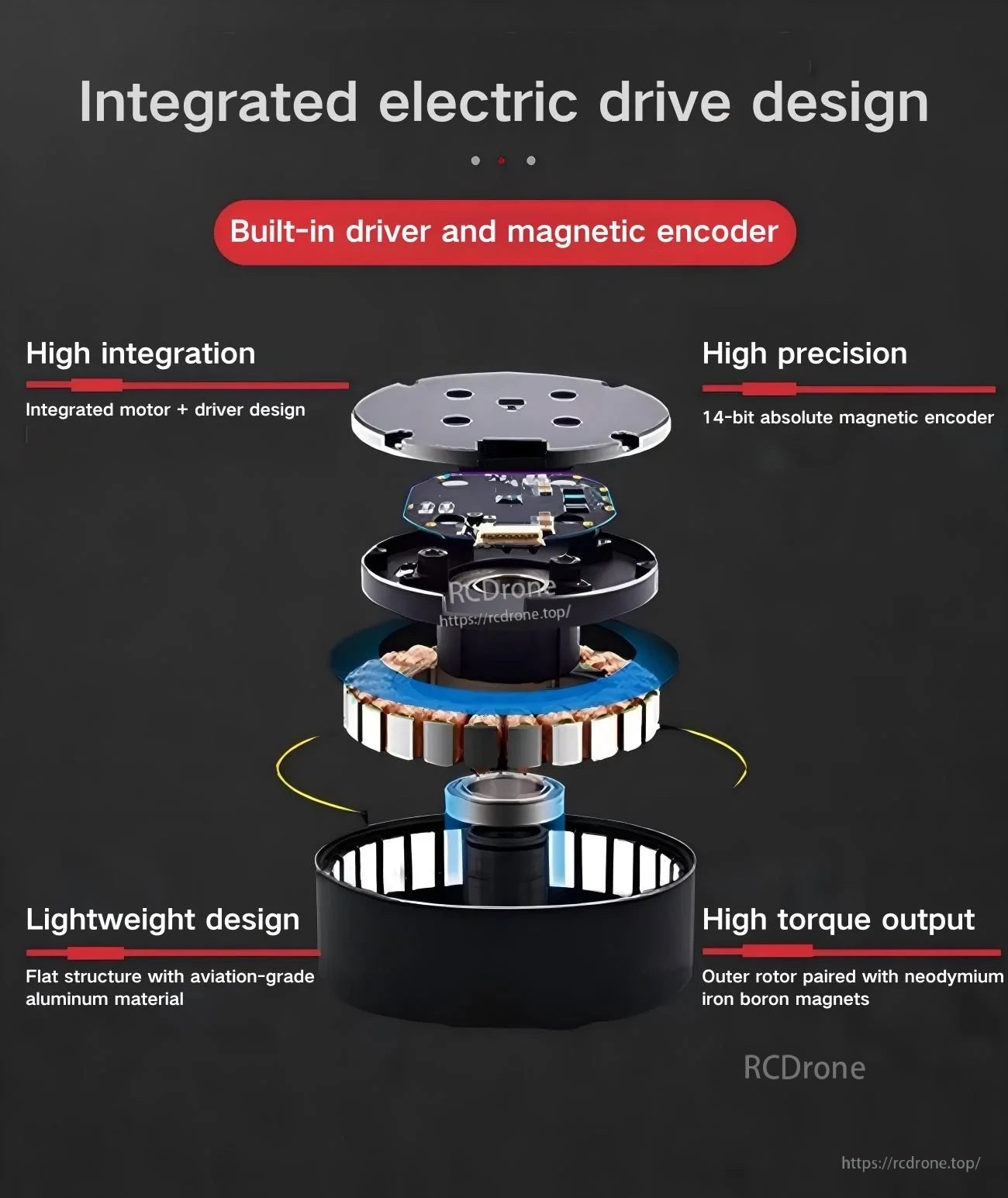
Eine integrierte Treiberplatine und ein magnetischer Encoder reduzieren die Verkabelung, während der Motor leicht und drehmomentfokussiert bleibt.

Klare Schnittstellenbeschriftungen erleichtern das Verdrahten von Stromversorgung, CAN/RS485-Kommunikation und UART-Verbindungen während der Integration.
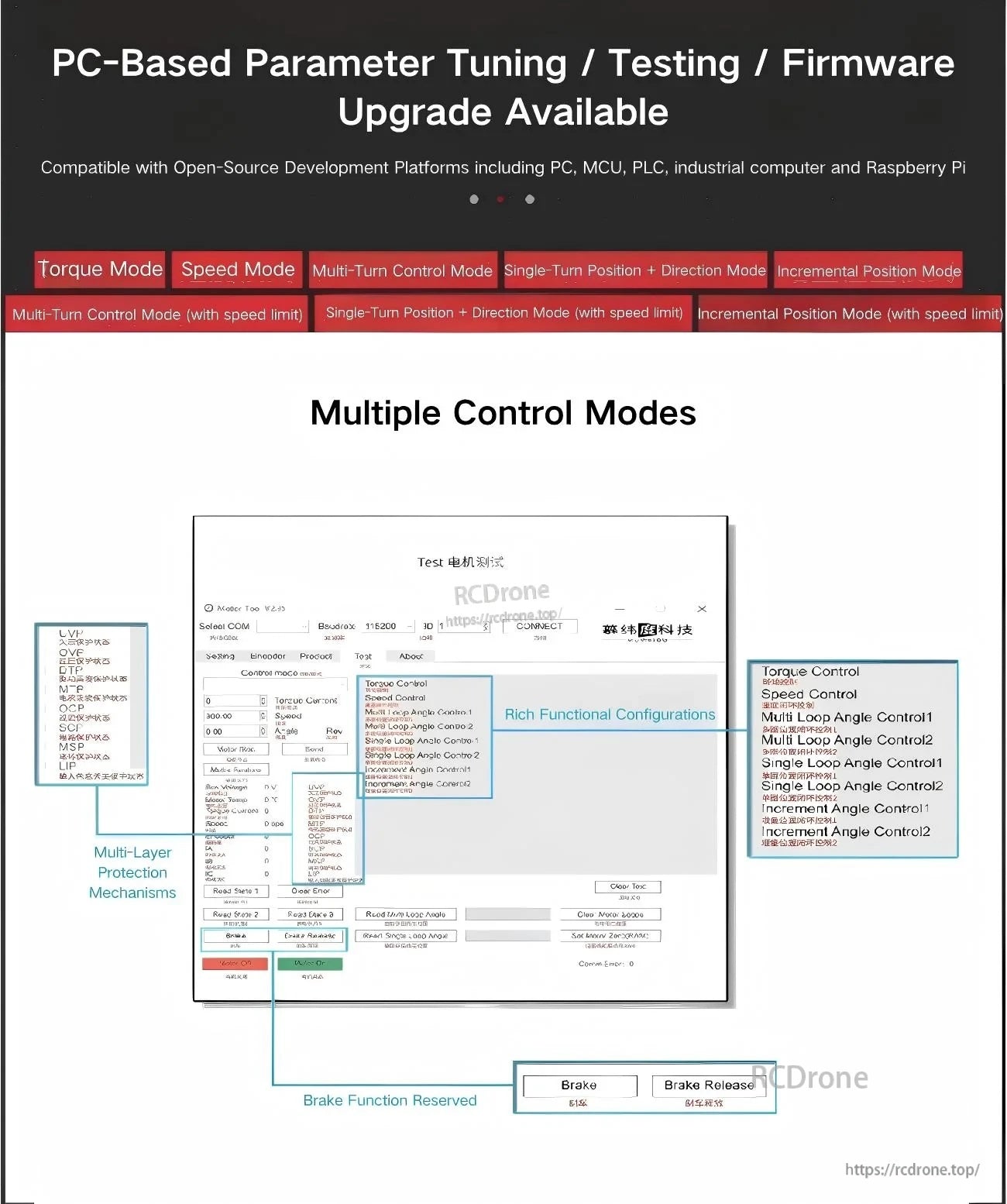
Die PC-basierte Abstimmung unterstützt die Einrichtung, Tests und Firmware-Updates in den Modi Drehmoment, Geschwindigkeit und Positionskontrolle.
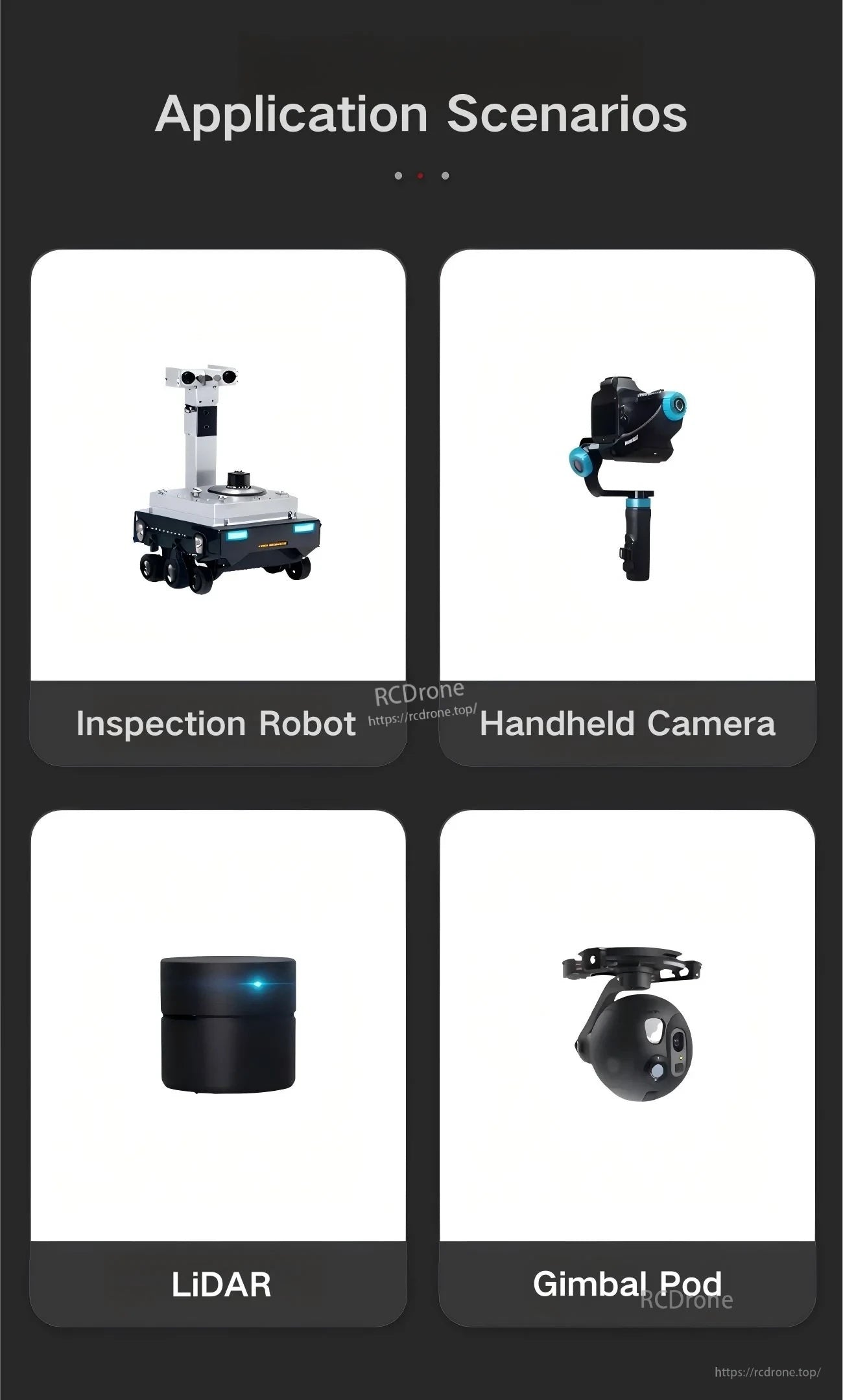
Typische Anwendungsfälle umfassen mobile Inspektionsroboter, stabilisierte Kamerasysteme, LiDAR-Plattformen und Gimbal-Pods.
Related Collections

