

MUWEIDU L5028 Motor Mini-Servomotor 16V 150 U/min 0,25N.m RS485/CAN 15-Bit/18-Bit Encoder
MUWEIDU L5028 Motor Mini-Servomotor 16V 150 U/min 0,25N.m RS485/CAN 15-Bit/18-Bit Encoder
MUWEIDU
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
MUWEIDU L5028 Motor ist ein Mini Servomotor , der für die Niedriggeschwindigkeits- und Hochpräzisionsbewegungssteuerung entwickelt wurde. Er unterstützt Geschwindigkeits-/Positionskontrolle und bietet RS485- oder CAN-Kommunikationsoptionen, mit Encoder-Wahlmöglichkeiten von 15-Bit oder 18-Bit für das Feedback.
Hauptmerkmale
- Serie von Niedriggeschwindigkeits-& hochpräzisen bürstenlosen DC-Motoren (Servomotoren)
- Hohlwellen-Design
- Stabile & sanfte Bedienung
- CE-zertifiziert
- Integrierte Hochpräzision
- Leichte Konstruktion, hohe Drehmomentleistung
- Erfüllt die Anforderungen an Niedriggeschwindigkeits- und Hochpräzisions-Positionskontrolle
- Hochwertige Siliziumstahlbleche und hochtemperaturbeständige Hochleistungs-Magneten werden als Kernmaterialien des Motors verwendet
- Äußeres Rotor-Multi-Stage-Design liefert höheres Drehmoment, ideal für platzbeschränkte Anwendungen
- Bürstenlose Struktur kombiniert mit Hochleistungslagern sorgt für eine sanftere Rotation und längere Lebensdauer
- Hochpräzise, temperaturstabile Legierungswiderstände ermöglichen eine genaue Strommessung und -regelung
- Vollständiger N-Kanal Drei-Phasen Vollbrückenantrieb mit niedrigem Innenwiderstand und hoher Stromausgabe
- Unterstützt nahtloses Umschalten zwischen Drehmoment-Offenregelung, Geschwindigkeits- und Positionsregelungsmodi
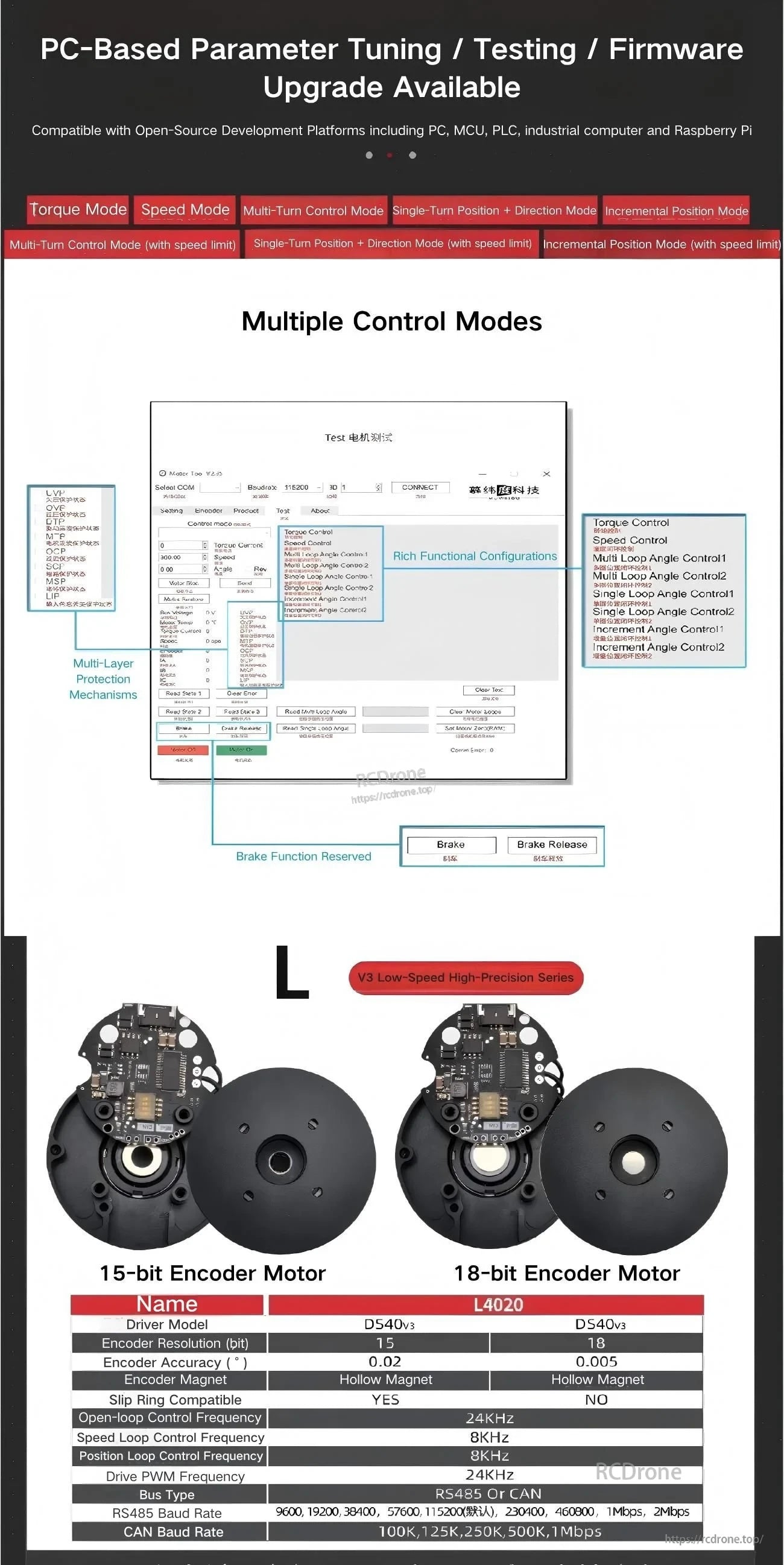
- PC-basierte Parametereinstellung / Testen / Firmware-Upgrade verfügbar
- Kompatibel mit Open-Source-Entwicklungsplattformen einschließlich PC, MCU, PLC, Industriecomputer und Raspberry Pi
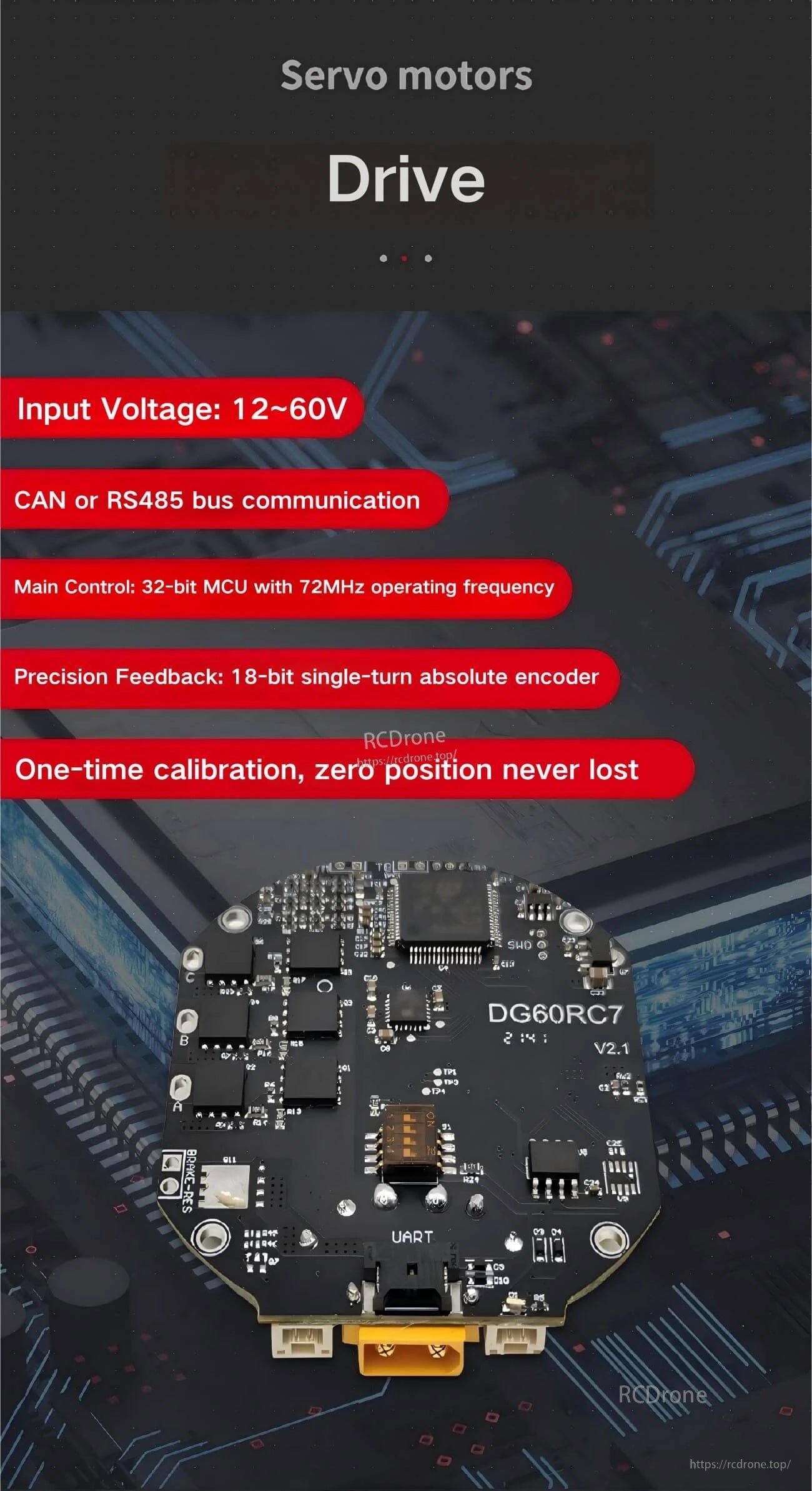
- Eingangsspannung: 12~60V
- CAN- oder RS485-Buskommunikation
- Hauptsteuerung: 32-Bit-MCU mit 72MHz Betriebsfrequenz
- Präzises Feedback: 18-Bit-Einmal-Dreh-Absolute-Encoder
- Einmalige Kalibrierung, Nullposition geht nie verloren
- Mehrere Steuerungsmodi: Drehmomentmodus; Geschwindigkeitsmodus; Mehrdrehungssteuerungsmodus; Einmal-Dreh-Positions- + Richtungsmodus; Inkrementeller Positionsmodus
- Steuermodi (mit Geschwindigkeitsbegrenzung): Mehrdrehungs-Steuermodus (mit Geschwindigkeitsbegrenzung); Einzeldrehungs-Positions- + Richtungsmodus (mit Geschwindigkeitsbegrenzung); Inkrementeller Positionsmodus (mit Geschwindigkeitsbegrenzung)
Technische Daten
| Modell | L5028 |
| Nennspannung | 16V |
| Nennstrom | 0.82A |
| Spitzenleistung | 4.7W |
| Nennmoment | 0.25 N.m |
| Spitzenmoment | 0.37 N.m |
| Nennspeed | 150 U/min |
| Encoder | 15-Bit oder 18-Bit |
| Rotormasse | 192 gcm^2 |
| Motor Temperaturüberwachung | Ja |
| Steuermodi | Geschwindigkeit/Position |
| Kommunikationsprotokoll | RS485 oder CAN |
| Gesamtabmessungen | Phi49 mm x 28.9 mm |
| Gewicht | 135 g |
Schnittstellendefinition (CAN/RS485)
| Schnittstelle | Hinweis |
|---|---|
| B/L | RS485-B oder CAN-L |
| A/H | RS485-A oder CAN-H |
| V- | Negative Stromversorgung |
| V- | Negative Stromversorgung |
| V+ | Positive Stromversorgung |
| V+ | Positive Stromversorgung |
| T | UART-Sender |
| R | UART-Empfänger |
| G | Signal GND |
Anwendungen
- Humanoide Roboter
- Robotergelenke
- Exoskelette
- Quadruped-Roboter
- AGV-Fahrzeuge
- ARU-Roboter
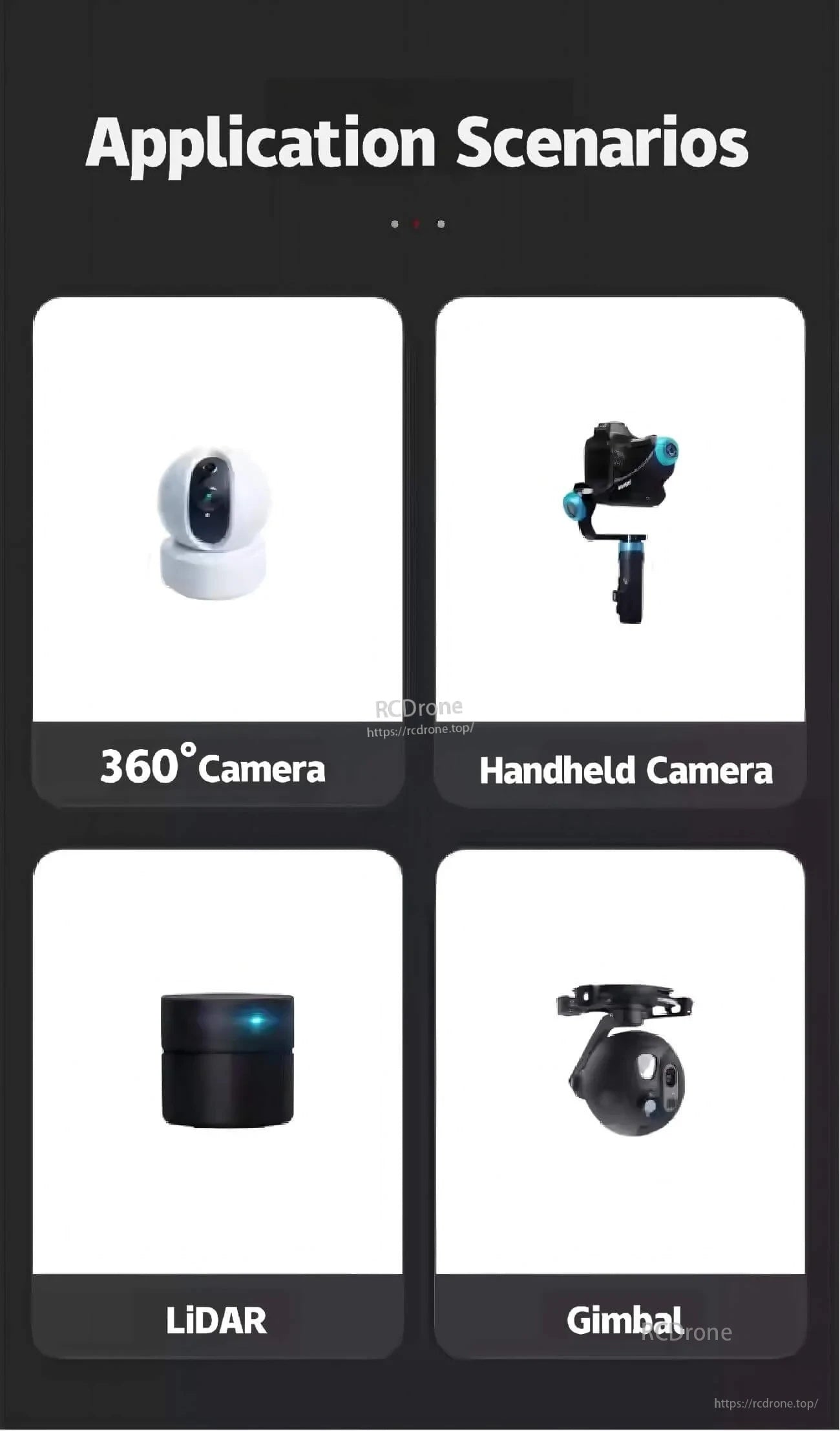
- 360° Kamera
- Handkamera
- LiDAR
- Gimbal
Für Unterstützung bei der Vorauswahl, Bestätigung der Verkabelung oder Dokumentationshilfe kontaktieren Sie [email protected] or besuchen Sie https://rcdrone.top/.
Handbücher / Dokumente
Details

MUWEIDU L5028 ist ein kompakter, langsamer Mini-Servomotor mit einem Hohlwellen-Formfaktor für platzbeschränkte Konstruktionen.

Integrierte Antriebselektronik unterstützt einen breiten Eingangsbereich und CAN- oder RS485-Kommunikation für präzise Bewegungssteuerung.

Klare Schnittstellenbeschriftungen helfen bei der Verkabelung von CAN/RS485-Signalen, Stromanschlüssen und UART-Pins während der Integration.
PC-basierte Parametrierung und mehrere Steuerungsmodi erleichtern die Anpassung von 15-Bit- oder 18-Bit-Encoder-Feedback an die Aufgabe.
Gut geeignet für kompakte Robotik- und Stabilisationsprojekte wie Kamerasysteme, LiDAR-Baugruppen und Gimbals.
Related Collections

