

MUWEIDU L6030 Bürstenloser DC-Servomotor 24V 18-Bit-Encoder RS485/CAN 100 U/min 0,79 N.m (Φ58×26mm)
MUWEIDU L6030 Bürstenloser DC-Servomotor 24V 18-Bit-Encoder RS485/CAN 100 U/min 0,79 N.m (Φ58×26mm)
MUWEIDU
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
MUWEIDU L6030 Motor ist ein Niedriggeschwindigkeits-, Hochpräzisions- bürstenloser DC-Servomotor, der für Geschwindigkeits-/Positionsregelung in der Robotik und kompakten Automatisierungssystemen entwickelt wurde. Er verfügt über ein integriertes elektrisches Antriebssystem, 18-Bit-Encoder-Rückmeldung, Motorüberwachungstemperatur und RS485- oder CAN-Kommunikation zur Integration in den Controller.
&Hauptmerkmale- Serienpositionierung: Niedriggeschwindigkeit & hochpräzise bürstenlose Gleichstrommotoren; Mini-Servomotoren
- Hohlwellen-Design
- Stabile & reibungslose Bedienung
- CE-zertifiziert
- Integrierte Hochpräzision; leichte Konstruktion; hohe Drehmomentleistung
- Integriertes elektrisches Antriebssystem mit 32-Bit-Mikrocontroller
- Kernmotorenmaterialien: hochwertige Siliziumstahlbleche und hochtemperaturbeständige Hochleistungsneodym-Magnete
- Äußeres Rotor-Multi-Stage-flach Design für höheres Drehmoment in raumbegrenzten Anwendungen
- Bürstenlose Struktur mit Hochleistungslagern für reibungslosere Rotation und längere Lebensdauer
- Hochpräzise, temperaturstabile Legierungswiderstände für genaue Strommessung und -regelung
- Voll N-Kanal Drei-Phasen Vollbrückenantrieb (niedriger Innenwiderstand, hohe Stromausgabe)
- Unterstützt nahtloses Umschalten zwischen Drehmoment-Open-Loop-, Geschwindigkeits- und Positionsregelungsmodi
- PC-basierte Parameteranpassung/-test/-Firmware-Upgrade verfügbar; kompatibel mit Open-Source-Entwicklungsplattformen einschließlich PC, MCU, PLC, Industriecomputer und Raspberry Pi
Anwendungen
- Humanoide Roboter
- Roboterarme
- Exoskelette
- Quadruped-Roboter
- AGV-Fahrzeuge
- ARU-Roboter
- 360° Kamera
- Handheld-Kamera
- LiDAR
- Gimbal
Spezifikationen
| Modell | L6030 |
| Nennspannung | 24V |
| Nennstrom | 1.28A |
| Spitzenleistung | 9.8W |
| Nennmoment | 0.79 N.m |
| Spitzenmoment | 1.12 N.m |
| Bewertete Geschwindigkeit | 100 U/min |
| Encoder | 18 Bit |
| Rotormasse | 515 gcm² |
| Motor Temperaturüberwachung | JA |
| Steuermodi | Geschwindigkeit/Position |
| Kommunikationsprotokoll | RS485 oder CAN |
| Gesamtmaße | Φ58mm×26mm |
| Gewicht | 242g |
Schnittstellendefinition
- ID-Schalter: ID SWITCH
- Stecker: CAN/RS485
| B/L | RS485-B oder CAN-L |
| A/H | RS485-A oder CAN-H |
| V- | Negative Stromversorgung |
| V- | Negative Stromversorgung | V+ | Positive Stromversorgung |
| V+ | Positive Stromversorgung |
| T | UART-Transmitter |
| R | UART-Empfänger |
| G | Signal GND |
Steuermodi (Software)
- Drehmomentmodus
- Geschwindigkeitsmodus
- Multi-Turn Steuerungsmodus
- Single-Turn Position + Richtungsmodus
- Inkrementeller Positionsmodus
- Multi-Turn Steuerungsmodus (mit Geschwindigkeitsbegrenzung)
- Single-Turn Position + Richtungsmodus (mit Geschwindigkeitsbegrenzung)
- Inkrementeller Positionsmodus (mit Geschwindigkeitsbegrenzung)
Handbücher
Für Integrationssupport und Fragen vor dem Verkauf (Verdrahtung, RS485/CAN-Auswahl und Parametereinstellungen) kontaktieren Sie [email protected] or besuchen Sie https://rcdrone.top/.
Details

Entwickelt für kompakte Robotik, kombiniert die L6030-Serie ein Hohlwellenformat mit stabiler, sanfter Servoleistung bei niedrigen Geschwindigkeiten.

Eine integrierte Antriebsarchitektur unterstützt präzise Geschwindigkeits-/Positionskontrolle und hält den Motor kompakt und effizient.

Klare Schnittstellenbeschriftungen helfen, die Verkabelung für RS485/CAN-Kommunikation und Stromanschlüsse während der Integration zu optimieren.
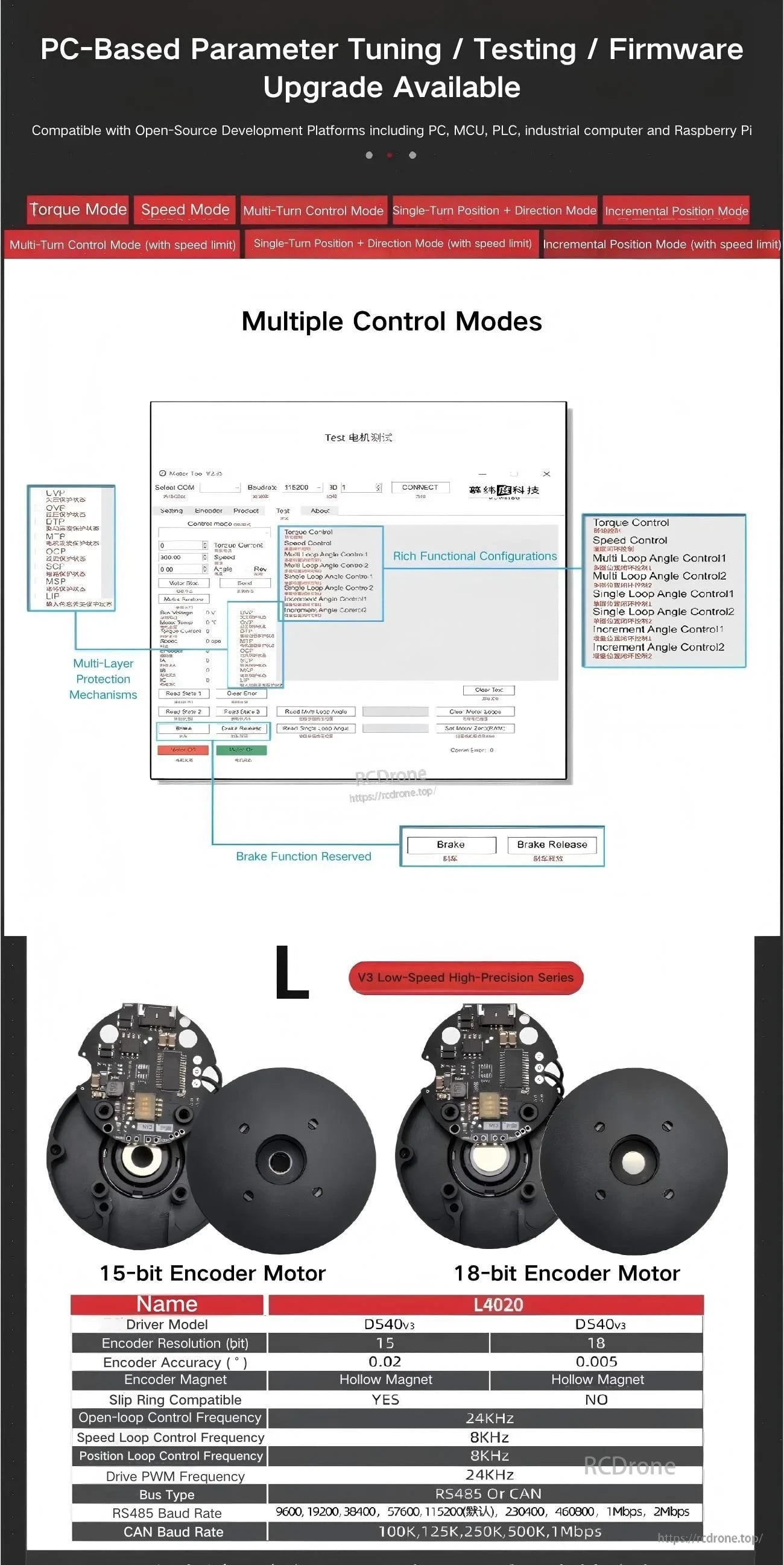
PC-basierte Werkzeuge ermöglichen die Parametrierung, Tests und Firmware-Updates, mit Unterstützung für Drehmoment-, Geschwindigkeits- und Positionsmodi.
Eine praktische Lösung für stabilisierte Bild- und Sensorsysteme wie 360°-Kameras, Gimbals und LiDAR-Plattformen.
Related Collections

