

MUWEIDU L9030 Motor Bürstenloser DC-Servomotor 24V 160 U/min 1N.m RS485/CAN 15/18bit Encoder
MUWEIDU L9030 Motor Bürstenloser DC-Servomotor 24V 160 U/min 1N.m RS485/CAN 15/18bit Encoder
MUWEIDU
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
MUWEIDU L9030 Motor ist ein Niedriggeschwindigkeits-, Hochpräzisions- bürstenloser DC-Servomotor, der für die Positions- und Geschwindigkeitsregelung in Robotik- und Automatisierungsprojekten entwickelt wurde. Zu den Highlights der Serie gehören das Design mit Hohlwelle, stabiler & reibungsloser Betrieb und CE-zertifizierte Kennzeichnung. Für Integrationshilfe, Dokumentationszugang oder Fragen vor dem Kauf kontaktieren Sie [email protected] or besuchen https://rcdrone.top/.
Hauptmerkmale
- Serienpositionierung: „Serie von Niedriggeschwindigkeits-& Hochpräzisen bürstenlosen Gleichstrommotoren“ / „Mini Servomotoren“
- Hohlwellen-Design
- Stabile & reibungslose Betriebsweise
- CE-zertifiziert (Labeltext)
- Integrierte Hochpräzision; leichte Bauweise; hohe Drehmomentleistung (Labeltext)
- Nach ultra-hohen Standards entwickelt (Labeltext)
- Motorcharakteristika des integrierten elektrischen Antriebssystems (Labeltext)
- Erfüllt die Anforderungen an Niedriggeschwindigkeits- und Hochpräzisionspositionskontrolle (Labeltext)
- Kernmaterialien (Labeltext): hochwertige Siliziumstahlbleche und hochtemperaturbeständige Hochleistungsneodym-Magnete
- Äußeres Rotor-Multi-Stage-flach Design liefert höheres Drehmoment, ideal für platzbeschränkte Anwendungen (Labeltext)
- Bürstenlose Struktur kombiniert mit Hochleistungslagern für eine sanftere Rotation und längere Lebensdauer (label text)
- Hochpräzise, temperaturstabile Legierungswiderstände für genaue Strommessung und -regelung (label text)
- Vollständiger N-Kanal-Dreiphasen-Vollbrückenantrieb mit niedrigem Innenwiderstand und hoher Stromausgabe (label text)
- Unterstützt nahtloses Umschalten zwischen Drehmoment-Offenregelung, Geschwindigkeits- und Positionsregelungsmodi (label text)
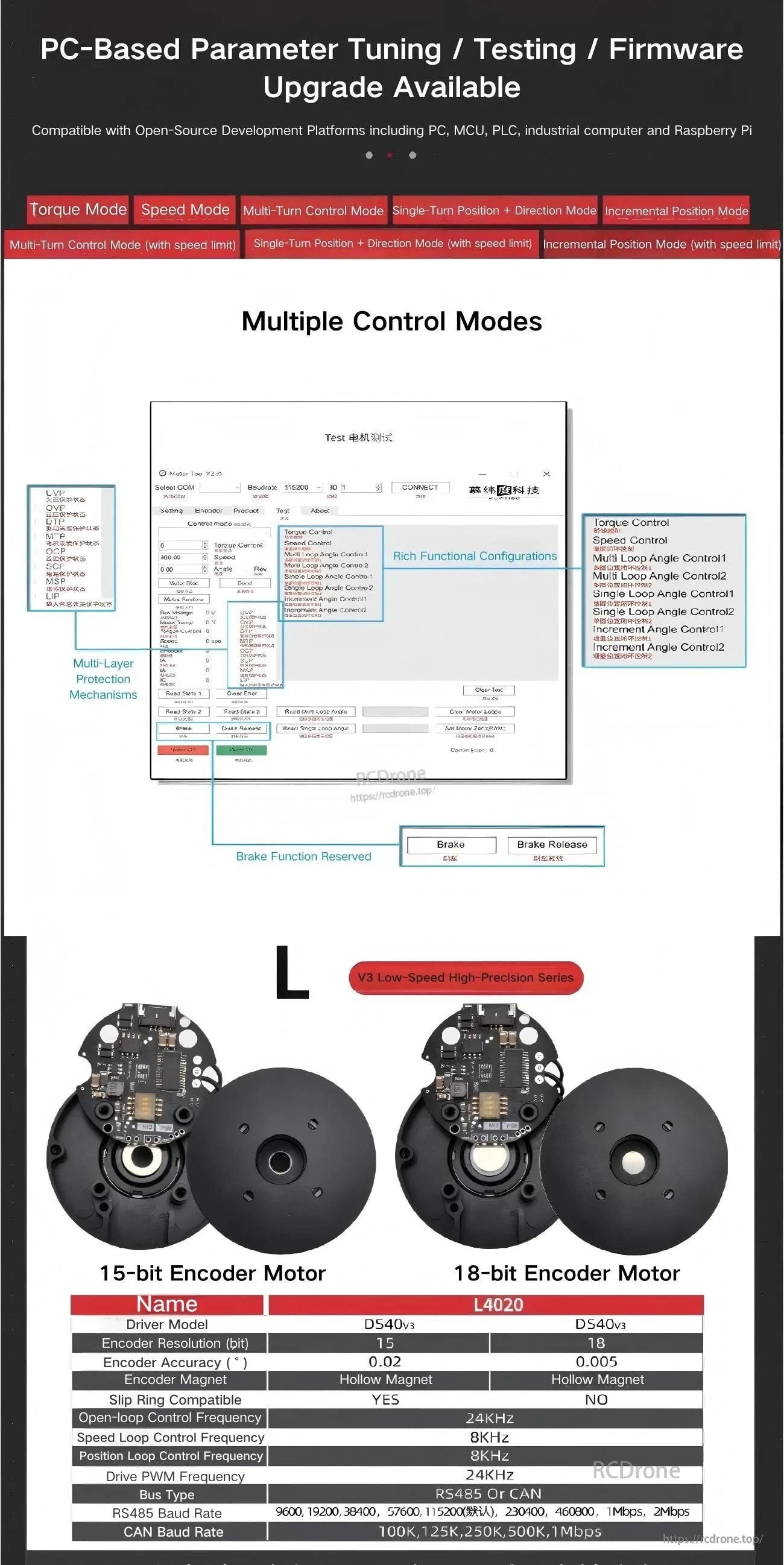
- PC-basierte Parametereinstellung / Test / Firmware-Upgrade verfügbar (label text)
- Kompatibel mit Open-Source-Entwicklungsplattformen einschließlich PC, MCU, PLC, Industriecomputer und Raspberry Pi (label text)
Anwendungsszenarien
- Humanoide Roboter
- Roboterarme
- Exoskelette
- Quadruped-Roboter
- AGV-Fahrzeuge
- ARU-Roboter
Technische Daten
| Modell | L9030 |
| Nennspannung | 24V |
| Nennstrom | 1.85A |
| Spitzenleistung | 1,8W |
| Nennmoment | 1N.m |
| Spitzenmoment | 2,2N.m |
| Bewertete Geschwindigkeit | 160 U/min |
| Encoder | 15-Bit oder 18-Bit |
| Rotormasse | 2860 gcm^2 |
| Motor Temperaturüberwachung | JA |
| Steuermodi | Geschwindigkeit/Position |
| Kommunikationsprotokoll | RS485 oder CAN |
| Gesamtmaße | Phi89mm x 37mm |
| Gewicht | 510 g |
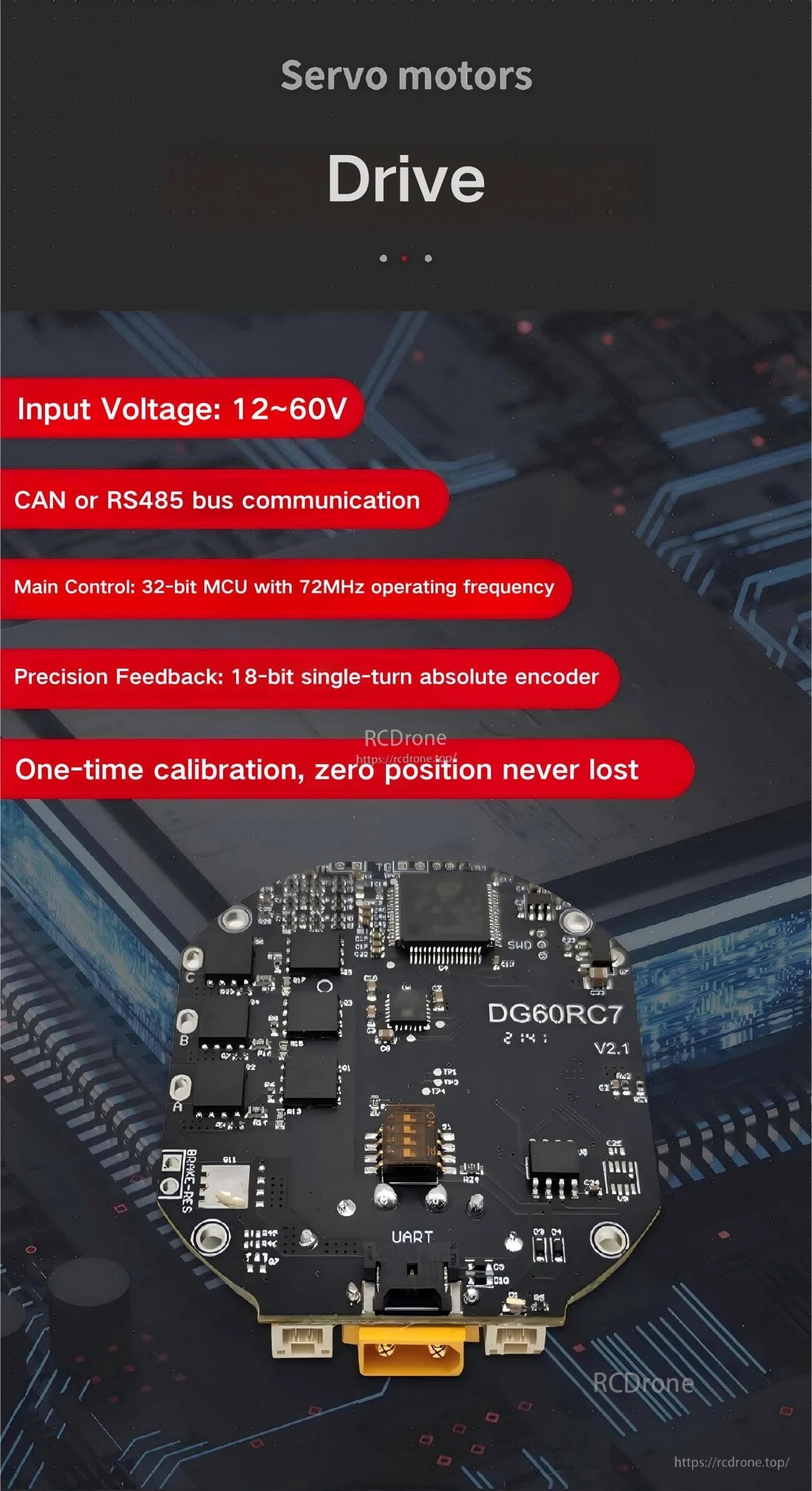
Antrieb / Steuerung (Beschriftungstext aus Bildern)
- Eingangsspannung: 12~60V
- CAN- oder RS485-Buskommunikation
- Hauptsteuerung: 32-Bit-Mikrocontroller mit 72 MHz Betriebsfrequenz
- Präzisionsfeedback: 18-Bit-Einmalumdrehungs-Absolute-Encoder
- Einmalige Kalibrierung, Nullposition geht nie verloren
Schnittstellendefinition (Beschriftungstext aus Bildern)
| B/L | RS485-B oder CAN-L |
| A/H | RS485-A oder CAN-H |
| V- | Negative Stromversorgung |
| V- | Negative Stromversorgung |
| V+ | Positive Stromversorgung |
| V+ | Positive Stromversorgung |
| T | UART-Sender |
| R | UART-Empfänger |
| G | Signal GND |
Weitere Schnittstellenbeschriftungen angezeigt: ID SWITCH; CAN/RS485.
Steuermodi (Beschriftungstext aus Bildern)
- Drehmomentmodus
- Geschwindigkeitsmodus
- Multi-Turn-Steuermodus
- Single-Turn-Positions- + Richtungsmodus
- Inkrementeller Positionsmodus
- Multi-Turn-Steuermodus (mit Geschwindigkeitsbegrenzung)
- Single-Turn-Positions- + Richtungsmodus (mit Geschwindigkeitsbegrenzung)
- Inkrementeller Positionsmodus (mit Geschwindigkeitsbegrenzung)
Handbücher / Dokumente
Details

Entwickelt für kompakte Robotik- und Automatisierungsanwendungen, konzentriert sich die L9030-Serie auf die Steuerung mit niedriger Geschwindigkeit und hoher Präzision mit einem Hohlwellen-Formfaktor.

Hochwertige Kernmaterialien, eine Außenrotorstruktur und glatte Lager unterstützen einen stabilen Betrieb, während mehrere Steuermodi Drehmoment, Geschwindigkeit und Position abdecken.
Breite Unterstützung für Eingangsspannungen und CAN/RS485-Konnektivität erleichtern die Integration mit PC, MCU, PLC oder industriellen Steuerungen.

Die Pinbelegung des Steckers und die Kennzeichnung des ID-Schalters machen die Busverkabelung und die Adressierung von Geräten während der Installation klarer.
PC-Tools unterstützen die Parametereinstellung, Tests und Firmware-Updates, mit Encoder-Optionen für unterschiedliche Positionierungsbedürfnisse.

Related Collections

