

MUWEIDU ZH5030 Integrierter Elektromotor 16V RS485/CAN 19-Bit-Encoder für Robotik
MUWEIDU ZH5030 Integrierter Elektromotor 16V RS485/CAN 19-Bit-Encoder für Robotik
MUWEIDU
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
MUWEIDU ZH5030 ist ein integriertes elektrisches Antriebssystem, das für die präzise Positionskontrolle bei niedrigen Geschwindigkeiten entwickelt wurde. Es unterstützt Drehmoment-/Geschwindigkeits-/Positionskontrollmodi und bietet RS485- oder CAN-Kommunikation für die Integration in Robotik und Automatisierung.
Hauptmerkmale
- Hochleistungs-32-Bit-Mikrocontroller: MS-Serie vollständig kompatibel mit allen Steuerbefehlen der MF-Serie.
- Erfüllt die Anforderungen an die Positionskontrolle bei niedrigen Geschwindigkeiten und hoher Präzision.
- Hochwertige Siliziumstahlbleche und hochtemperaturbeständige Hochleistungsneodym-Magnete werden als Kernmaterialien für den Motor verwendet.
- Äußere Rotor-Multi-Stage-flach Design liefert höheres Drehmoment für platzbeschränkte Anwendungen.
- Bürstenlose Struktur kombiniert mit Hochleistungslagern für einen reibungsloseren Betrieb und eine längere Lebensdauer.
- Hochpräzise, temperaturstabile Legierungswiderstände für eine genaue Strommessung und -regelung.
- Vollständiger N-Kanal Drei-Phasen Vollbrückenantrieb mit niedrigem Innenwiderstand und hoher Stromausgabe.
- Unterstützt nahtloses Umschalten zwischen Drehmoment-Open-Loop-, Geschwindigkeits- und Positionsregelungsmodi.
- PC-basierte Parametereinstellung / Testen / Firmware-Upgrade verfügbar; kompatibel mit Open-Source-Entwicklungsplattformen einschließlich PC, MCU, PLC, Industriecomputer und Raspberry Pi.
Technische Spezifikationen
| Modell | ZH5030 |
| Nennspannung | 16V |
| Nennstrom | 1.35A |
| Spitzenleistung | 12W |
| Nennmoment | 0.24 N.m |
| Spitzenmoment | 0.53 N.m |
| Bewertete Geschwindigkeit | 440 U/min |
| Encoder | 19 Bit |
| Rotorträgheit | 202 gcm^2 |
| Motor Temperaturüberwachung | JA |
| Steuermodi | Drehmoment / Geschwindigkeit / Position |
| Kommunikationsprotokoll | RS485 oder CAN |
| Gesamtabmessungen | Durchmesser 49 mm x 28.9 mm |
| Gewicht | 145 g |
Schnittstellendefinition
- ID-Schalter: ID SWITCH
- Kommunikationsanschluss: CAN/RS485
| Schnittstelle | Hinweis |
|---|---|
| B/L | RS485-B oder CAN-L |
| A/H | RS485-A oder CAN-H |
| V- | Negative Stromversorgung |
| V- | Negative Stromversorgung |
| V+ | Positive Stromversorgung |
| V+ | Positive Stromversorgung |
| T | UART-Transmitter |
| R | UART-Empfänger |
| G | Signal GND |
Anwendungsszenarien
- Humanoide Roboter
- Robotergelenke
- Exoskelette
- Quadruped-Roboter
- AGV-Fahrzeuge
- ARU-Roboter
- 360° Kamera
- Handkamera
- LiDAR
- Pod-Gimbal
Für Integrationsanleitungen und Bestellunterstützung kontaktieren Sie [email protected] or besuchen Sie https://rcdrone.top/ .
Handbücher / Dokumente
Details

Entwickelt für Niedriggeschwindigkeits- und Hochpräzisionsbewegungen, kombiniert der ZH5030 einen bürstenlosen Motor und Antriebselektronik in einer kompakten Einheit.

Klare Pin-Beschriftungen und ein integrierter ID-Schalter helfen, die Verkabelung von Multi-Node RS485 oder CAN während der Integration zu optimieren.
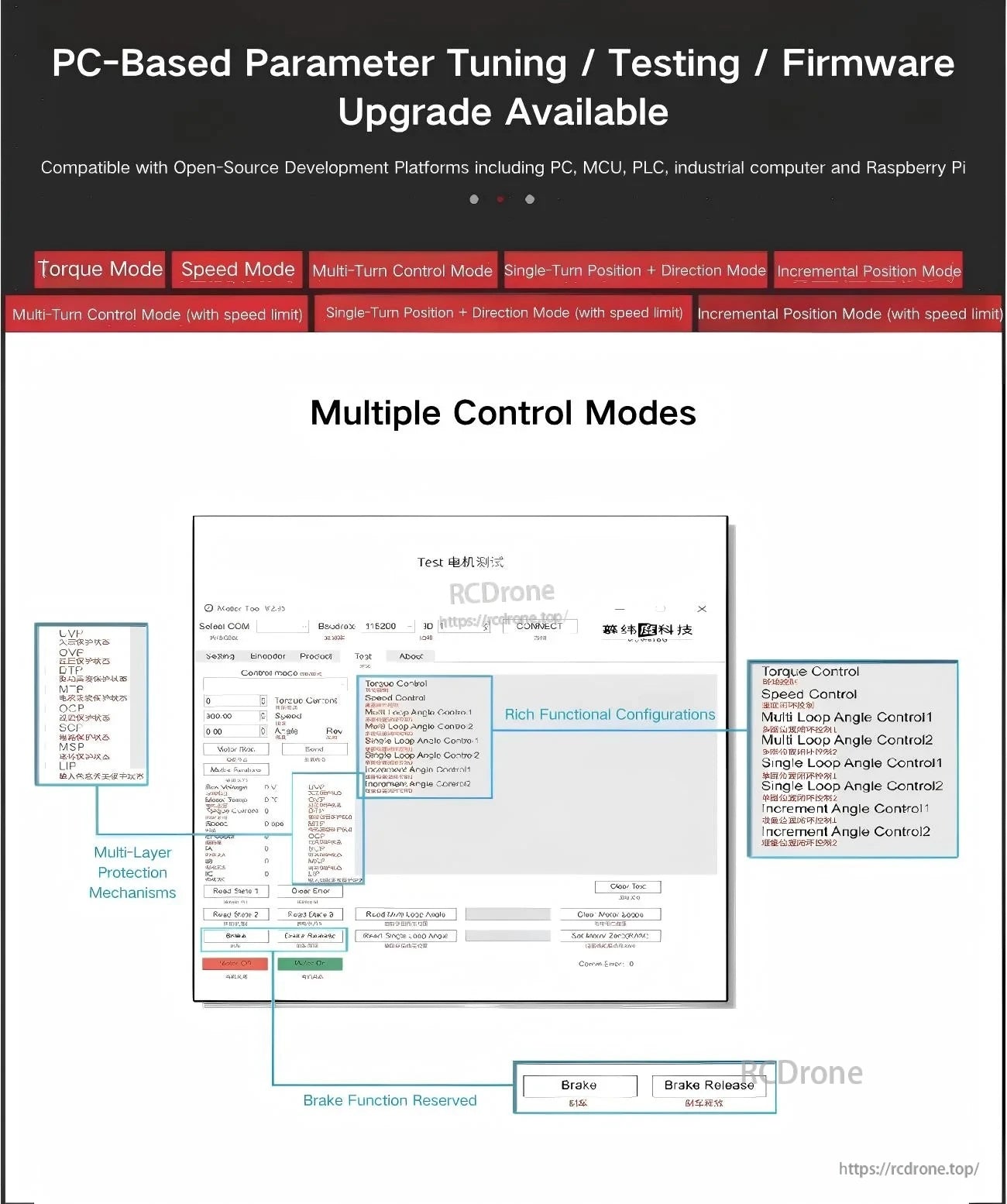
PC-basierte Werkzeuge unterstützen die Parametrierung, Tests und Firmware-Updates mit wählbaren Drehmoment-, Geschwindigkeits- und Positionsregelungsmodi.

Related Collections

