







MyActuator RH-17 Hohlwellen-Harmonic-Roboter-Gelenkmotor – 54 Nm Spitzendrehmoment, 100:1 Übersetzungsverhältnis, EtherCAT & CAN BUS, Dual ABS-17BIT Encoder
MyActuator RH-17 Hohlwellen-Harmonic-Roboter-Gelenkmotor – 54 Nm Spitzendrehmoment, 100:1 Übersetzungsverhältnis, EtherCAT & CAN BUS, Dual ABS-17BIT Encoder
MyActuator
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Der MyActuator RH-17 Hollow Harmonic Robot Joint Motor ist ein Hochleistungsaktuator, der für fortschrittliche Roboteranwendungen entwickelt wurde. Mit einem Übersetzungsverhältnis von 100:1, 54 N·m Spitzenmoment und 35 N·m Nennmoment gewährleistet er präzisen, stabilen und leistungsstarken Betrieb. Ausgestattet mit EtherCAT- und CAN-BUS-Kommunikation, einem dual ABS-17BIT Encoder-System und gekreuzten Rollenlagern bietet dieser Motor außergewöhnliche Steuerungsgenauigkeit und Langlebigkeit. Sein kompaktes Hohl-Design (Ø80 mm × 90,2 mm) und 1,11 kg Gewicht machen ihn ideal für Roboterarme, kollaborative Roboter und Automatisierungssysteme, die eine hohe Drehmomentdichte und präzise Bewegungssteuerung erfordern.
Hauptmerkmale
-
Hohe Drehmoment- & Leistungsfähigkeit: Nennmoment von 35 N·m und Spitzenmoment von 54 N·m für anspruchsvolle Anwendungen.
-
Duale Kommunikation: Unterstützt EtherCAT und CAN BUS Protokolle für nahtlose Integration und schnelle Reaktion.
-
Präzisionssteuerung: Duale ABS-17BIT Encoder für Ein- und Ausgang bieten präzise Positionierung mit <0.01° Wiederholgenauigkeit.
-
Kompakt & Leicht: Hohlwellen-Design mit nur 1,11 kg Gewicht, optimiert für hohe Drehmomentdichte.
-
Robuste Bauweise: Ausgestattet mit gekreuzten Rollenlagern für erhöhte Tragfähigkeit und Langlebigkeit.
-
Industriequalität Zuverlässigkeit: Isolationsklasse F, Hochgeschwindigkeits-Mikrocontroller und optimierte Wärmeableitung für stabile Langzeitleistung.
Produktparameter
| Parameter | Wert |
|---|---|
| Übersetzungsverhältnis | 100:1 |
| Eingangsspannung | 48 V |
| Leerlaufdrehzahl | 30 U/min |
| Leerlaufstrom | 0,6 A |
| Nenn-Drehzahl | 25 U/min |
| Nennmoment | 35 N·m |
| Nennleistung | 91 W |
| Nennstrom | 4,7 A (rms) |
| Spitzenmoment | 54 N·m |
| Spitzenstrom | 7.4 A (rms) |
| Gegenspannungs-Konstante | 19,2 Vdc/Krpm |
| Modul-Drehmoment-Konstante | 7,4 N·m/A |
| Motorphasenwiderstand | 0,70 Ω |
| Motorphaseninduktivität | 0,47 mH |
| Polpaare | 10 |
| Spiel | <40 Bogensekunden |
| Radiallast | Statisch: 16,3 kN / Dynamisch: 10,4 kN |
| Axiallast | Statisch: 78,2 kN / Dynamisch: 20,8 kN |
| Trägheit | N: 0,52 kg·m² / B: 0,56 kg·m² |
| Wiederholgenauigkeit der Position | <0.01° |
| Kommunikation | CAN BUS & EtherCAT |
| Gewicht | Netto: 1,11 kg / Verpackt: 1,28 kg |
| Isolationsgrad | F |
Encoder-Typ
-
Eingangs-Encoder: ABS-17BIT
-
Ausgangs-Encoder: ABS-17BIT
-
Lieferung präzises Bewegungsfeedback für verbesserte Steuerungsgenauigkeit.
Installation & Abmessungen
-
Größe: Ø80 mm × 90,2 mm
-
Montage: Mehrere Durchgangsbohrungen und Gewindeanschlüsse für eine sichere Installation.
-
Hohlwelle: Optimiert für Kabelverlegung in Roboterarmen und Automatisierungssystemen.
Interface & Verkabelung
-
EtherCAT-Ports: IN- und OUT-Anschlüsse für Netzwerkverbindungen.
-
CAN BUS-Ports: CAN_H und CAN_L für die Kommunikation.
-
Stromanschlüsse: XT30-Stecker für zuverlässige Stromversorgung.
-
Zusätzliche Anschlüsse: Schnittstellen für Speicherbatterie und Entladewiderstand für fortschrittliche Steuerungssysteme.
Lieferumfang
-
Aktuator: MyActuator RH-17 Hohlharmonischer Gelenkmotor ×1
-
A. Stromversorgungskabel ×2
-
B. CAN BUS Kommunikationskabel ×4
-
C. 120Ω Anschlusswiderstand ×1
-
D. EtherCAT Kommunikationskabel ×2
-
E. CAN BUS Kommunikationsmodul ×1 (Kostenloser USB-CAN-Adapter pro Bestellung enthalten)
Anwendungen
-
Kollaborative Roboterarme
-
Industrielle Automatisierungssysteme
-
Humanoide und vierbeinige Roboter
-
Präzisionsbewegungsplattformen
-
Autonome Robotergelenke für Forschung und Entwicklung
Details

Der Roboter-Motor RH-17 bietet einen dualen Encoder, CAN BUS & EtherCAT, ein Übersetzungsverhältnis von 100:1, 48V, 35 N.m Drehmoment, 91W Leistung. Erhältlich mit/ohne Bremse. Enthält Zeichnungen und Parameter.
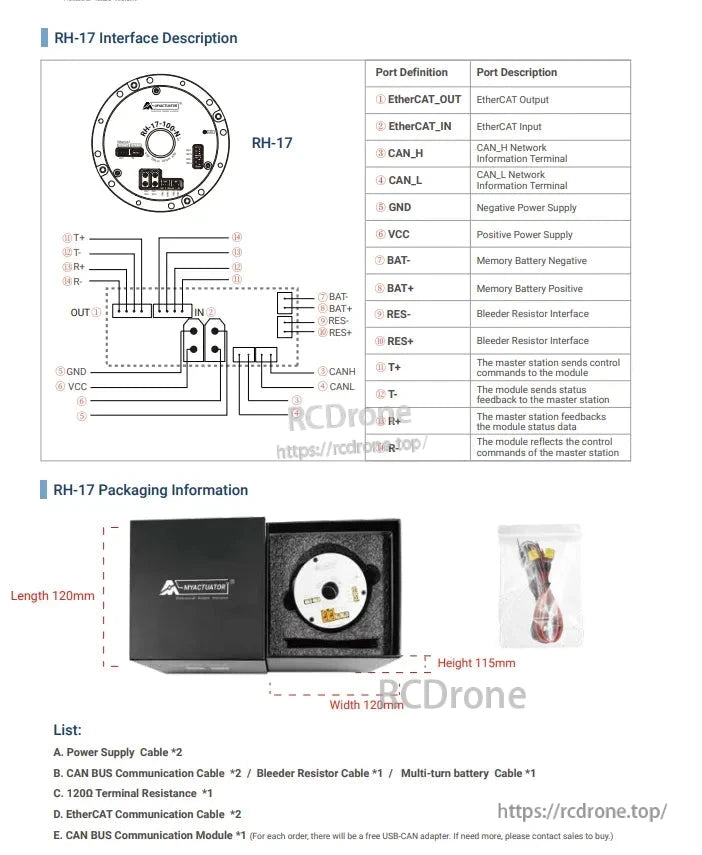
Die RH-17-Schnittstelle umfasst EtherCAT-, CAN-Bus-, Strom- und Batterieverbindungen. Die Verpackung enthält Kabel, Widerstände und ein Modul. Abmessungen: 120×120×115mm. Die Liste umfasst Strom-, CAN- und EtherCAT-Kabel, Widerstand und Kommunikationsmodul.
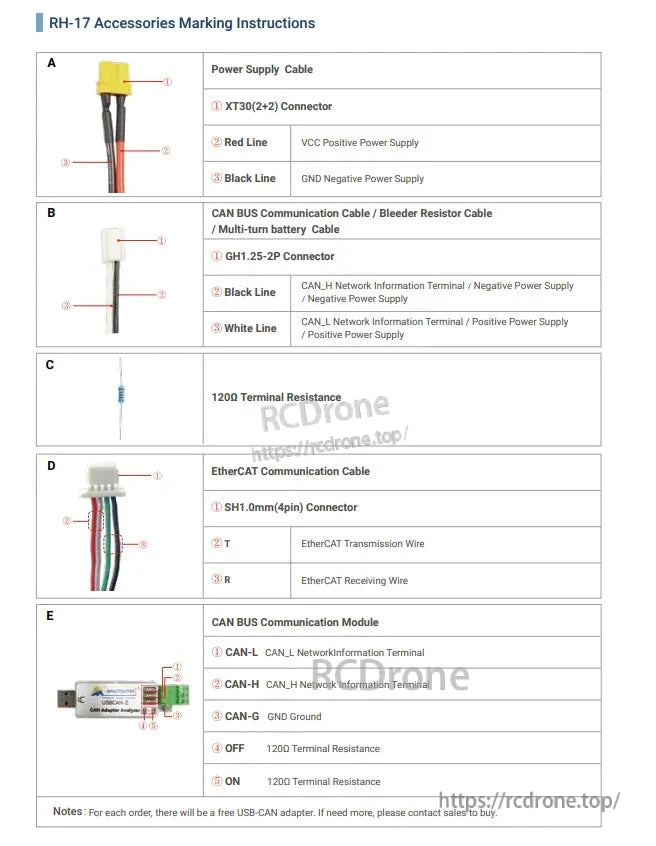
Die RH-17-Zubehörteile umfassen Strom-, CAN-BUS-, EtherCAT-Kabel, 120Ω-Widerstand und Kommunikationsmodul. Die Details umfassen Anschlüsse, Drahtfarben, Funktionen und Anschlusswiderstände für jedes Bauteil. Ein USB-CAN-Adapter ist der Bestellung beigefügt.
Related Collections







