





MyActuator RH-20 Harmonic Roboter-Gelenkmotor, 100:1 Übersetzungsverhältnis, 80N·m Spitzendrehmoment, EtherCAT & CAN-Bus, Dual 17-Bit Encoder
MyActuator RH-20 Harmonic Roboter-Gelenkmotor, 100:1 Übersetzungsverhältnis, 80N·m Spitzendrehmoment, EtherCAT & CAN-Bus, Dual 17-Bit Encoder
MyActuator
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Der MyActuator RH-20 Harmonic Robot Joint Motor ist ein hochleistungsfähiger harmonischer Antriebsaktuator, der für Robotergelenke, industrielle Automatisierung und präzise Bewegungssysteme entwickelt wurde. Mit einem 100:1 Übersetzungsverhältnis, 80N·m Spitzenmoment, 50N·m Nennmoment und 130W Nennleistung bietet dieser Aktuator leistungsstarke, stabile und effiziente Leistung in einem kompakten Formfaktor.
Ausgestattet mit EtherCAT- und CAN-Bus-Kommunikationsprotokollen und doppelten 17-Bit-Absolute-Encodern gewährleistet der RH-20 eine außergewöhnliche Wiederholgenauigkeit der Positionierung (<0,01°), was ihn ideal für humanoide Roboter, kollaborative Roboterarme, mobile Roboter und andere Präzisionsanwendungen macht.
Hauptmerkmale
-
Hohe Leistung – 50N·m Nennmoment, 80N·m Spitzenmoment und 130W Nennleistung für schwere Anwendungen.
-
Präzisionssteuerung – Dual-ABS 17-Bit-Encoder bieten eine Wiederholgenauigkeit von weniger als 0,01°.
-
Erweiterte Kommunikation – Unterstützt EtherCAT und CAN-Bus für schnelle und zuverlässige Echtzeitsteuerung.
-
Zuverlässiger Schutz – F-Klasse-Isolierung gewährleistet einen sicheren und stabilen Betrieb bei kontinuierlicher Hochlastnutzung.
-
Kompaktes Design – 90 mm Durchmesser, 97,4 mm Höhe und nur 1,75 kg Gewicht für nahtlose Integration in Mehrachsen-Systeme.
-
Robuste Lager – Kreuzrollenlager für hohe radiale und axiale Tragfähigkeit sowie lange Lebensdauer.
Technische Spezifikationen
Motorleistung
| Parameter | Einheit | Wert |
|---|---|---|
| Übersetzungsverhältnis | – | 100 |
| Eingangsspannung | V | 48 |
| Leerlaufdrehzahl | U/min | 30 |
| Leerlaufstrom | A | 1.2 |
| Nenn-Drehzahl | U/min | 25 |
| Nennmoment | N·m | 50 |
| Nennleistung | W | 130 |
| Nennstrom | A (rms) | 6.8 |
| Spitzenmoment | N·m | 80 |
| Spitzenstrom | A (rms) | 10.6 |
| Motor Rück-EMK-Konstante | Vdc/Krpm | 19.2 |
| Modul Drehmomentkonstante | N·m/A | 7.3 |
| Motor Phasenwiderstand | Ω | 0.36 |
| Motor Phaseninduktivität | mH | 0.51 |
| Paar Pole | – | 10 |
| 3-Phasen-Anschluss | – | Y |
| Spiel | Bogenminuten | <40 |
Last & Trägheit
| Parameter | Einheit | Wert |
|---|---|---|
| Radiallast (statisch/dynamisch) | KN | 22 / 14.6 |
| Axiallast (statisch/dynamisch) | KN | 132.7 / 34 |
| Trägheit (N/B) | kg·m² | 0.87 / 0.95 |
| Gewicht (N/B) | Kg | 1.45 / 1.75 |
| Encoder-Typ | – | Duale ABS-17BIT (Eingang) / ABS-17BIT (Ausgang) |
| Wiederholgenauigkeit der Position | Grad | <0.01 |
| Kommunikation | – | EtherCAT & CAN-Bus |
| Isolationsgrad | – | F |
Stillstandsmoment-Daten
| Drehmoment (N·m) | Temperaturanstieg (°C) | Stillstandszeit (s) | Phasenstrom (A rms) |
|---|---|---|---|
| 75 | 12 | 15 | 10.5 |
| 100 | 8 | 10 | 13.5 |
| 125 | 15 | 8 | 18 |
Schnittstelle und Pinbelegung
-
EtherCAT_IN / EtherCAT_OUT – Hochgeschwindigkeitskommunikationsports
-
CAN_H / CAN_L – CAN-Bus-Netzwerkanschlüsse
-
VCC / GND – Positive und negative Stromversorgung
-
RES+ / RES- – Entladewiderstands-Schnittstelle
-
BAT+ / BAT- – Anschluss für Mehrdrehungsspeicherbatterie
-
T+, T-, R+, R- – Master-Slave-Kommunikation und Statusrückmeldung
Lieferumfang
-
Stromversorgungskabel ×2
-
CAN-Bus-Kommunikationskabel ×4
Bleeder Resistor Cable ×1
-
Multi-Turn-Batteriekabel ×1
-
120Ω Anschlusswiderstand ×1
-
EtherCAT Kommunikationskabel ×2
-
CAN-Bus Kommunikationsmodul ×1 (USB-CAN-Adapter)
Anwendungen
-
Humanoide Robotergelenke
-
Kollaborative Roboterarme
-
Mobile Roboter und AGV-Antriebssysteme
-
Präzisionspositionierungsplattformen
-
Automatisierte Inspektions- und Laborausrüstung
Details
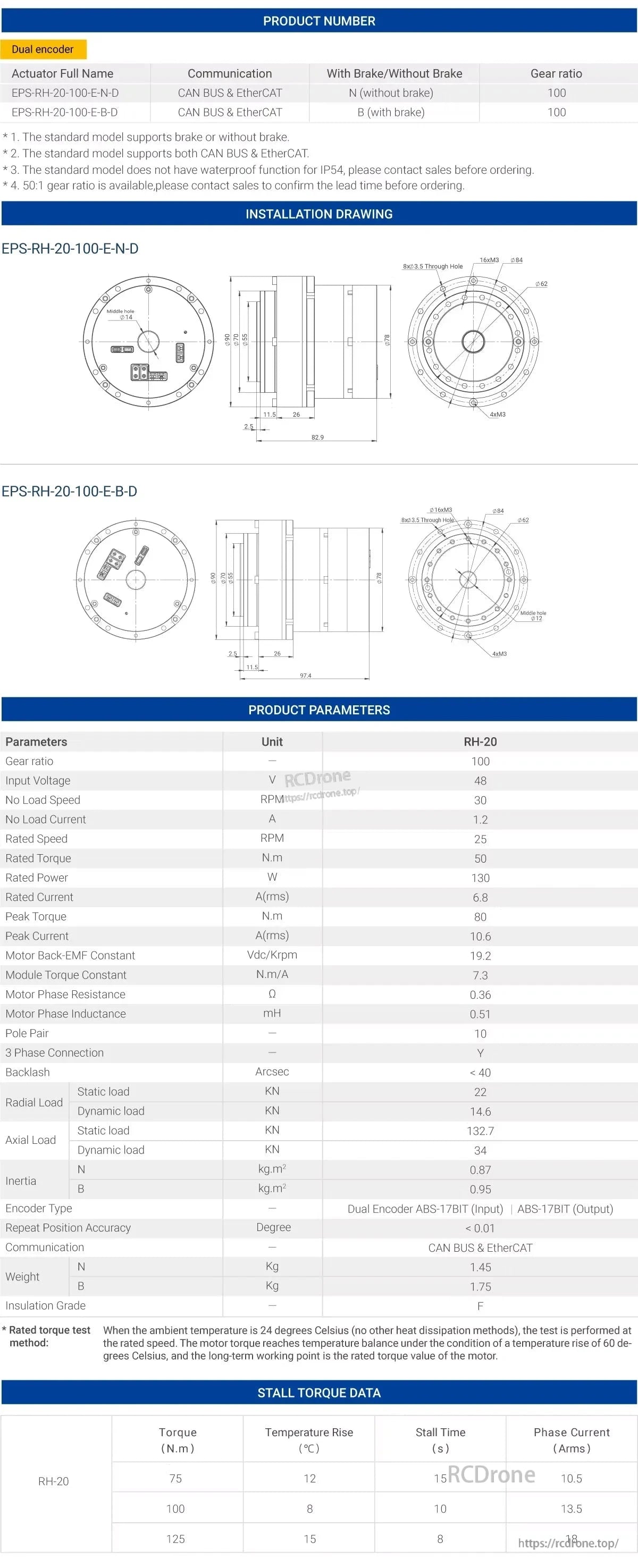
Mein Aktuator RH-20 harmonischer Motor hat einen dualen Encoder, CAN BUS & EtherCAT, 100:1 Übersetzungsverhältnis, 50 N.m Drehmoment, 130 W Leistung.Verfügbar mit/ohne Bremse, IP54, einschließlich Zeichnungen und Parametern.
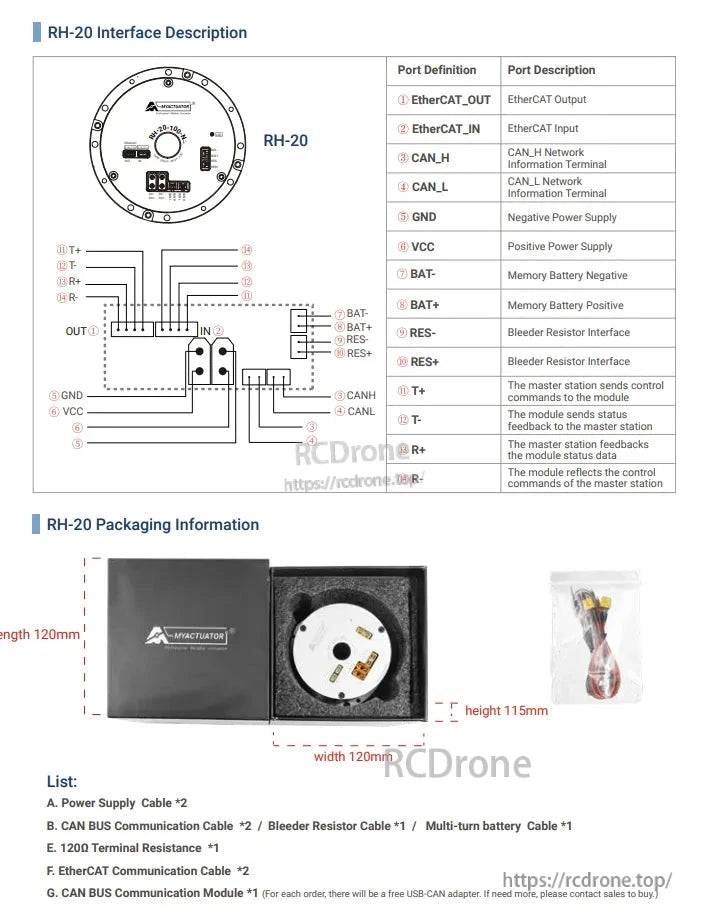
Die Schnittstelle des harmonischen Motors verfügt über EtherCAT-, CAN-Bus-, Strom- und Batterieverbindungen. Verpackung: 120x120x115mm. Enthält Kabel, Widerstände, Kommunikationsmodule für die Einrichtung.
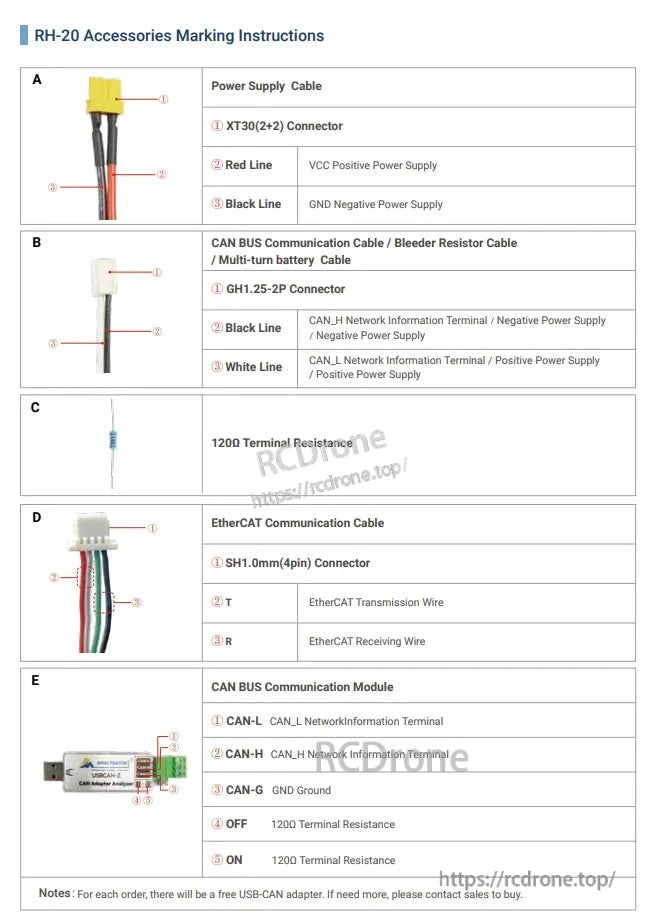
Die Zubehörteile des RH-20 enthalten Markierungsanweisungen für Strom, CAN BUS, EtherCAT-Kabel und Kommunikationsmodule. Die Details umfassen Steckertypen, Drahtfarben, Funktionen und Anschlusswiderstand. Jede Bestellung enthält einen kostenlosen USB-CAN-Adapter.
Related Collections





