






MyActuator RH-32 Hohlwellen-Harmonic-Roboter-Gelenkmodul, 48V, 229Nm Spitzenmoment, Dual 17-Bit-Encoder, CAN BUS & EtherCAT Steuerung
MyActuator RH-32 Hohlwellen-Harmonic-Roboter-Gelenkmodul, 48V, 229Nm Spitzenmoment, Dual 17-Bit-Encoder, CAN BUS & EtherCAT Steuerung
MyActuator
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Das MyActuator RH-32 Hollow Harmonic Robot Joint Module ist ein hochdrehmomentfähiger, hochpräziser Aktuator, der für Roboterarme, humanoide Roboter und kollaborative Automatisierungssysteme entwickelt wurde. Mit einem Übersetzungsverhältnis von 100:1, 48V Eingangsspannung und 229 N·m Spitzendrehmoment gewährleistet der RH-32 außergewöhnliche Leistung für Anwendungen, die sanfte Bewegungen, präzise Steuerung und hohe Tragfähigkeit erfordern. Mit Unterstützung für doppelte Encoder (17-Bit Ein-/Ausgang), CAN BUS &und EtherCAT-Kommunikation sowie einem Hohlwellen-Design integriert er sich nahtlos in fortschrittliche Robotersysteme.
Hauptmerkmale
-
Hohe Drehmomentleistung – Liefert bis zu 150 N·m Nennmoment und 229 N·m Spitzendrehmoment, ideal für schwere Robotergelenke.
-
Präzisionssteuerung – Duale 17-Bit-Encoder gewährleisten präzises Feedback und Wiederholgenauigkeit von <0,01°.
-
Vielseitige Kommunikation – Unterstützt CAN BUS und EtherCAT für eine zuverlässige und flexible Systemintegration.
-
Robuste Tragfähigkeit – Bewältigt bis zu 342,6 kN axiale statische Last und 81,6 kN axiale dynamische Last.
-
Kompaktes Hohl-Design – Erleichtert die Kabelverlegung durch das Gelenk für eine sauberere und sicherere Roboteranordnung.
-
Hohe Zuverlässigkeit – Bewertet mit F Isolationsgrad und fortschrittlichem Wärmeableitungsdesign für industrielle Langlebigkeit.
Technische Spezifikationen
| Parameter | Einheit | Wert |
|---|---|---|
| Übersetzungsverhältnis | — | 100 |
| Eingangsspannung | V | 48 |
| Leerlaufdrehzahl | U/min | 20 |
| Leerlaufstrom | A | 2.8 |
| Nenn-Drehzahl | U/min | 18 |
| Nennmoment | N·m | 150 |
| Nennleistung | W | 282 |
| Nennstrom | A(rms) | 21.8 |
| Maximales Drehmoment | N·m | 229 |
| Maximaler Strom | A(rms) | 32.1 |
| Motor Rück-EMK-Konstante | Vdc/Krpm | 26.7 |
| Modul Drehmomentkonstante | N·m/A | 6.9 |
| Motor Phasenwiderstand | Ω | 0.08 |
| Motor Phaseninduktivität | mH | 0.18 |
| Paar Pole | — | 10 |
| 3-Phasen-Anschluss | — | Y |
| Spiel | Bogenminuten | < 40 |
| Radiallast (statisch/dynamisch) | kN | 65.4 / 38.2 |
| Axiallast (statisch/dynamisch) | kN | 342.6 / 81.6 |
| Trägheit (N/B) | kg·m² | 6.86 / 8.32 |
| Encoder-Typ | — | Doppel-Encoder ABS-17BIT (Eingang/Ausgang) |
| Wiederholgenauigkeit der Position | Grad | < 0.01 |
| Kommunikation | — | CAN BUS &und EtherCAT |
| Gewicht (N/B) | Kg | 4.32 / 4.74 |
| Isolationsgrad | — | F |
Beschreibung der Schnittstelle
Der RH-32 unterstützt EtherCAT und CAN-Kommunikation, die eine zuverlässige Echtzeitsteuerung bietet.
-
EtherCAT: Hochgeschwindigkeits-deterministische Kommunikation für die industrielle Automatisierung.
-
CAN BUS: Flexible und stabile Kommunikation für komplexe Mehrgelenksysteme.
-
Dedizierte Anschlüsse für Strom, Rückmeldung und Steuersignale gewährleisten eine sichere und effiziente Integration.
Verpackungsinformationen
-
Boxabmessungen: 165mm × 165mm × 127mm
-
Enthaltenes Zubehör:
-
Stromversorgungskabel × 2
-
CAN BUS Kommunikationskabel × 2
-
Entladewiderstandskabel × 1
-
Multi-Turn Batteriekabel × 1
-
120Ω Anschlusswiderstand × 1
-
EtherCAT Kommunikationskabel × 2
-
CAN BUS Kommunikationsmodul × 1 (mit kostenlosem USB-CAN-Adapter)
- MyActuator RH-32-100 Roboter-Gelenkmodul x 1
-
Anwendungen
-
Kollaborative Roboter (Cobots)
-
Humanoide und Serviceroboter
Industrielle Manipulatoren
-
Automatisierte geführte Fahrzeuge (AGVs)
-
Präzisionspositionierungssysteme
Details
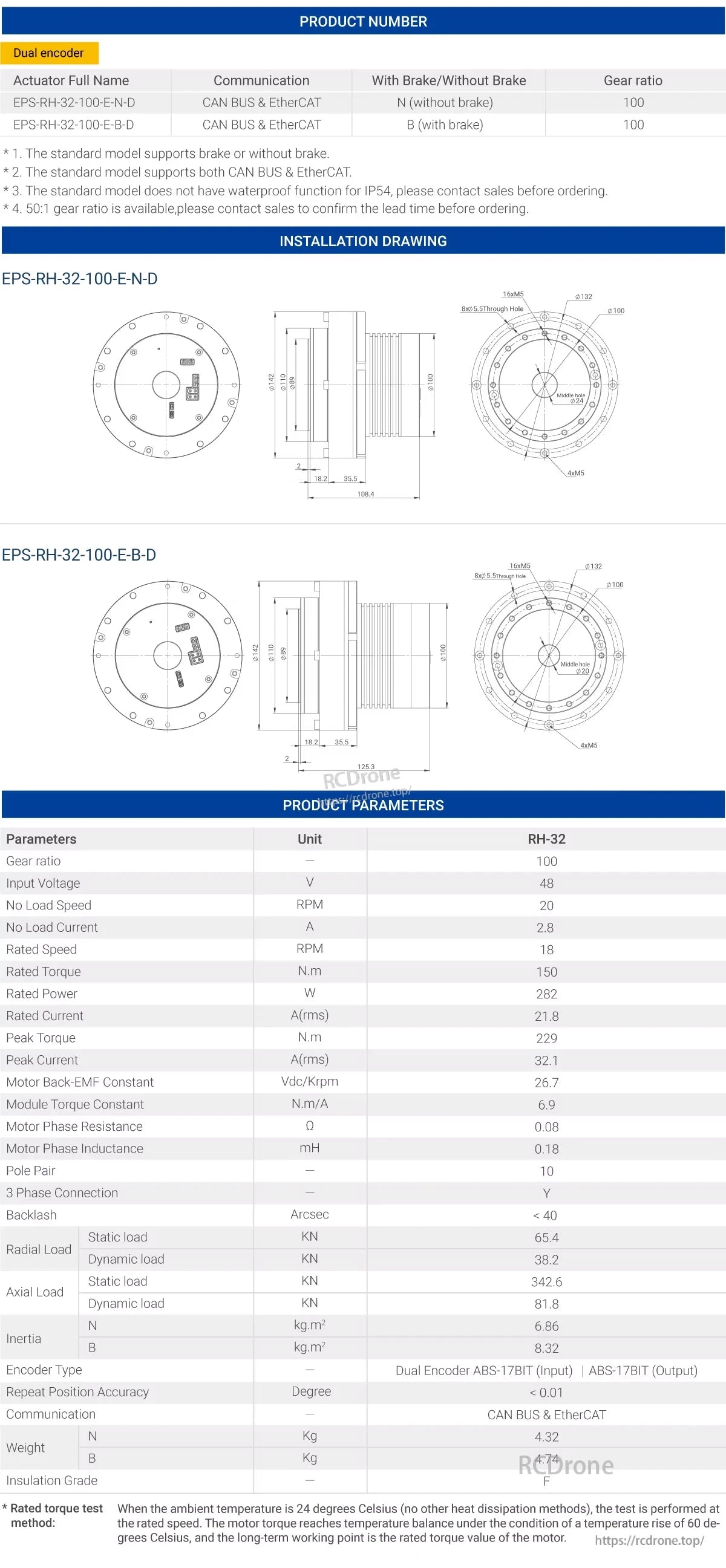
Robotergelenk RH-32 bietet einen doppelten Encoder, CAN BUS/EtherCAT, Übersetzungsverhältnis 100:1, 48V, 150 N.m Drehmoment, 21.8 A Strom. Optionale Bremse, IP54 verfügbar.
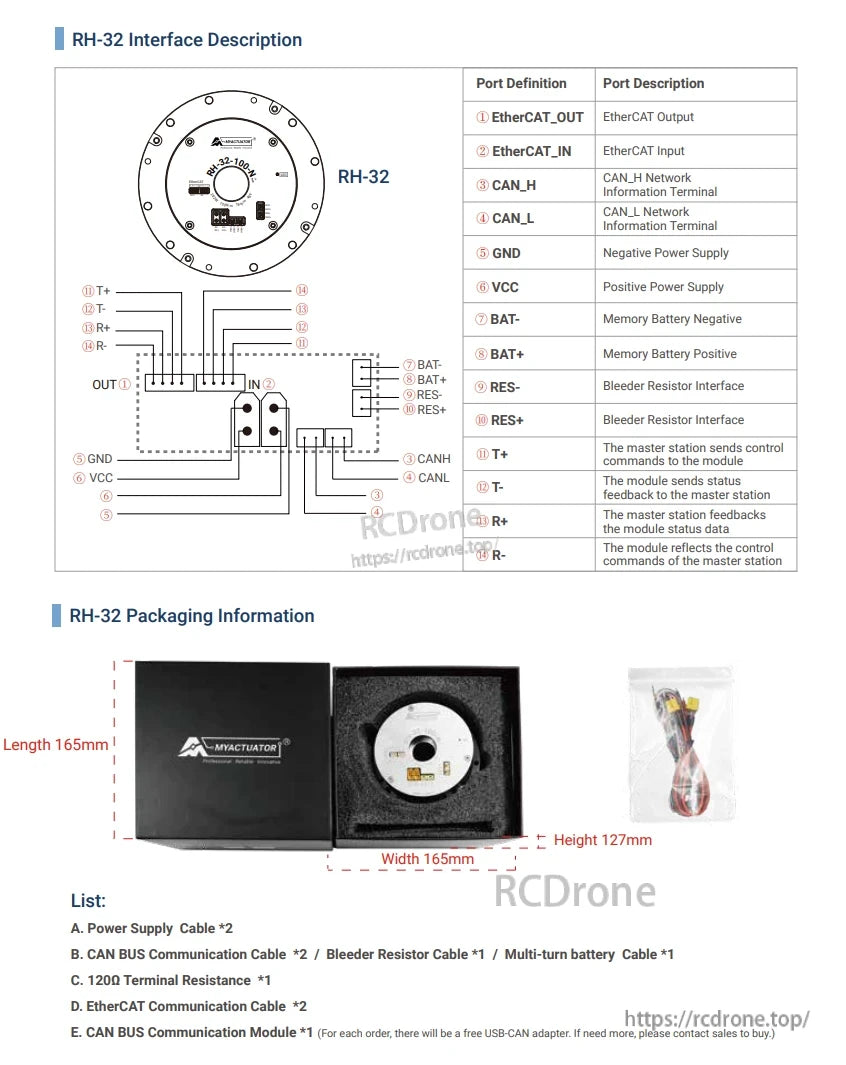
Der Roboterarm RH-32 verfügt über EtherCAT- und CAN-Schnittstellen, Anschlussdefinitionen, Abmessungen 165x165x127mm. Enthält Kabel, Abschlusswiderstand, CAN-Modul.
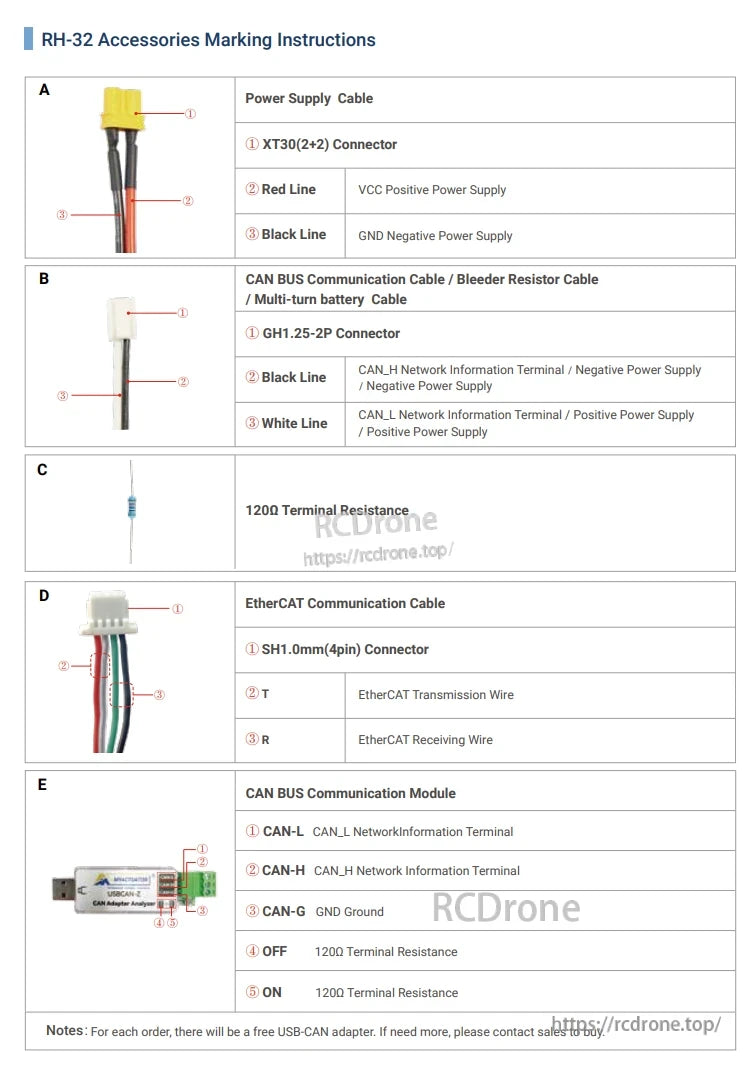
Die Zubehörteile für RH-32 umfassen Stromversorgung, CAN BUS, EtherCAT-Kabel, 120Ω Widerstand und CAN-Modul. Die Details umfassen Stecker, Drahtfunktionen und Abschlusswiderstände für eine ordnungsgemäße Installation und Kommunikation. Ein kostenloser USB-CAN-Adapter ist jeder Bestellung beigefügt.
Related Collections






