




MyActuator RMD-X12-320 Servoaktuator, Hochdrehmoment-Integrierter Motor mit EtherCAT & CAN BUS, USB-CAN Adapter, 120Ω Widerstand
MyActuator RMD-X12-320 Servoaktuator, Hochdrehmoment-Integrierter Motor mit EtherCAT & CAN BUS, USB-CAN Adapter, 120Ω Widerstand
MyActuator
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Der MyActuator RMD-X12-320 ist ein hochleistungsfähiger Servoaktuator, der für Industrieroboter, kollaborative Roboter und hochpräzise Automatisierungssysteme entwickelt wurde. Er integriert einen hochdrehmomentmotor, ein Planetengetriebe und fortschrittliche Treiberelektronik in einem kompakten Formfaktor, was nahtlose Bewegungssteuerung und zuverlässige EtherCAT- oder CAN-BUS-Kommunikation ermöglicht.
Mit seinem optimierten Design und den umfangreichen Schnittstellenoptionen bietet der RMD-X12-320 außergewöhnliche Effizienz, präzise Steuerung und Flexibilität für anspruchsvolle Roboteranwendungen.
Hauptmerkmale
-
Integriertes Design: Motor, Treiber und Reduzierer in einem kompakten Modul integriert.
-
Hohe Drehmomentabgabe: Ideal für schwere Robotergelenke und Automatisierungssysteme.
-
Mehrere Kommunikationsprotokolle: Unterstützt sowohl EtherCAT als auch CAN BUS.
-
Präzeses Feedback: Hochauflösende Encoder für sanfte Bewegungen und Positionierung.
-
Plug-and-Play Verkabelung: Deutlich beschriftete Kabel und enthaltene Adapter für eine schnelle Einrichtung.
-
Breite Kompatibilität: Geeignet für Industrieroboter, kollaborative Roboter, AGVs und Automatisierungsarme.
Schnittstellenbeschreibung
| Port | Definition | Beschreibung |
|---|---|---|
| 1. EtherCAT_OUT | EtherCAT-Ausgang | Kommunikationsausgang zu anderen Modulen. |
| 2. EtherCAT_IN | EtherCAT-Eingang | Kommunikationseingang vom Master-Controller. |
| 3. VCC | Positive Stromversorgung | Haupt-DC-Eingang positiv. |
| 4. CAN_L | CAN-Bus niedrig | CAN-Niedrigsignal für die CAN-Kommunikation. |
| 5. CAN_H | CAN-Bus hoch | CAN-Hochsignal für die CAN-Kommunikation. |
| 6. GND | Erde | Negativer Stromanschluss. |
| 7. T- / 8. T+ | Rückmeldelinien | Modulstatusrückmeldung an die Masterstation. |
| 9. R- / 10. R+ | Befehlsleitungen | Steuersignale, die von der Masterstation an den Aktuator gesendet werden. |
Inklusive Zubehör
| Etikett | Artikel | Beschreibung |
|---|---|---|
| A | Stromversorgung + CAN BUS Kabel ×2 | Beinhaltet XT90 Stromversorgungsstecker mit weißen (CAN_L), gelben (CAN_H), roten (VCC) und schwarzen (GND) Leitungen. |
| B | 120Ω Abschlusswiderstand ×1 | Für die CAN BUS Abschlussleitung. |
| C | EtherCAT Kommunikationskabel ×2 | SH1.0mm 4-polige Stecker für die EtherCAT Signalübertragung und -empfang. |
| D | CAN BUS Kommunikationsmodul ×1 | USB-zu-CAN-Adapter für Diagnosen und Integration.Beinhaltet umschaltbare 120Ω Abschlusswiderstände. |
Verpackungsinformationen
-
Boxmaße: 280 mm (Länge) × 230 mm (Breite) × 130 mm (Höhe)
-
Inhalt:
-
X12-320 Servo-Aktuator ×1
-
Stromversorgung + CAN BUS Kommunikationskabel ×2
-
120Ω Abschlusswiderstand ×1
-
EtherCAT Kommunikationskabel ×2
-
CAN BUS Kommunikationsmodul ×1 (USB-CAN-Adapter)
-
Anwendungen
-
Industrieroboter und kollaborative Roboter
-
AGVs (Automatisierte Geführte Fahrzeuge) und AMRs (Autonome Mobile Roboter)
-
Roboterarme für Automatisierung und präzise Montage
Forschungs- und Entwicklungsplattformen, die zuverlässige Bewegungssteuerung erfordern
Details
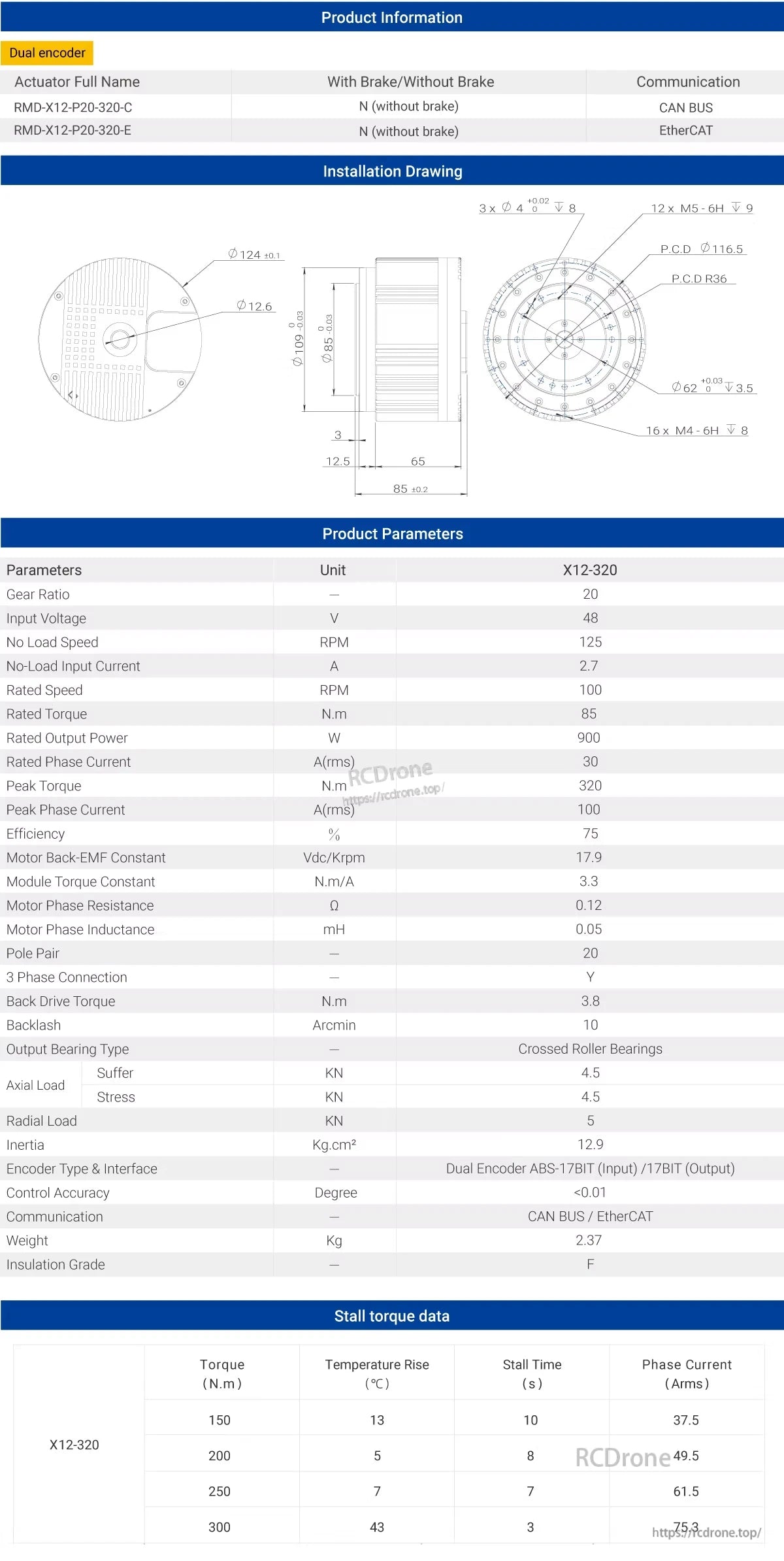
MyActuator RMD-X12-P20-320 Servoantrieb, dualer Encoder, 20 Übersetzungsverhältnis, 48V Eingang, 900W Leistung, 85Nm Nennmoment, CAN BUS/EtherCAT Kommunikation, 2.37kg Gewicht, gekreuzte Rollenlager, 12.9kg.cm² Trägheit.

Das Servo-Interface X12-320 unterstützt EtherCAT, CAN-Bus und Stromanschlüsse. Paket: 280×230×130mm. Enthält Netzteil, Kabel, Widerstände und einen kostenlosen USB-CAN-Adapter.

Zubehör für X12-320 umfasst Netzteil, CAN BUS, EtherCAT-Kabel und Moduldaten. Farblich codierte Drähte, Stecker und Anschlüsse gewährleisten eine ordnungsgemäße Installation. Kostenloser USB-CAN-Adapter pro Bestellung enthalten.

RMD X12 320 Servo: 100μs Reaktionszeit, dualer Encoder, EtherCAT/CAN, 320N.m Drehmoment, Ø124mm×85mm, für Robotik und Automatisierung.

RMD-X12-P20-320-C Servomotor: 48V Eingang, 20:1 Übersetzungsverhältnis, 900W Spitzenleistung, duale 17-Bit-Encoder, CAN BUS/EtherCAT, 2.37kg, mit detaillierten Abmessungen.

X12-320L Servomotor mit Stromversorgung, CAN BUS, EtherCAT-Kabeln und 1200 Ohm Abschlusswiderstand.

Verpackungsanzeige des MYACTUATOR Servos, einschließlich CAN BUS-Kabeln und 120Ω Widerstand.
Related Collections




