





MyActuator RMD-X2-7 Robotischer Planetenaktuator 7N·m 24V 28:1 Dual-Encoder CAN EtherCAT Servomotor
MyActuator RMD-X2-7 Robotischer Planetenaktuator 7N·m 24V 28:1 Dual-Encoder CAN EtherCAT Servomotor
MyActuator
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Der MyActuator RMD-X2-7 planetarische Aktuator ist ein kompakter und hochpräziser Servogetriebemotor, der für Robotik-, Automatisierungs- und Bewegungssteuerungsanwendungen entwickelt wurde. Mit einem Übersetzungsverhältnis von 28,17:1, doppelten Encodern (ABS 17-Bit-Eingang / 18-Bit-Ausgang) und Unterstützung für sowohl CAN BUS als auch EtherCAT Kommunikation gewährleistet er ein stabiles Drehmoment und präzise Positionierung. Mit einem Nennmoment von 2,5 N·m, einem Spitzenmoment von 7 N·m und einer Nennumdrehung von 142 U/min liefert dieser Aktuator zuverlässige Leistung in einem leichten 0,26 kg Formfaktor.
Hauptmerkmale
-
Hohe Präzisionskontrolle – Duales Encodersystem (17-Bit-Eingang, 18-Bit-Ausgang) mit <0,01° Steuerungsgenauigkeit.
-
Starke Leistung – Nennleistung 37 W, Nennstrom 3 A, Effizienz von 63%.
-
Kompaktes Design – Durchmesser 44 mm, Länge 63,5 mm, Gewicht nur 0,26 kg.
-
Sanfte Bewegung – Feldorientierte Steuerung (FOC), geringer Spielraum (≤12 Bogenminuten) und Drehmomentkonstante von 0,8 N·m/A.
-
Haltbarkeit – Rillenkugellager, Isolationsklasse F und robustes Aluminiumgehäuse.
-
Flexible Konnektivität – Kompatibel mit CAN BUS und EtherCAT Protokollen.
-
Sicherheit & Stabilität – Spitzenstrom 8,1 A, Nennwirkungsgrad und Stallschubfestigkeit getestet mit unterschiedlichen Phasenströmen.
Technische Daten
| Parameter | Wert |
|---|---|
| Übersetzungsverhältnis | 28.17:1 |
| Eingangsspannung | 24 V |
| Leerlaufdrehzahl | 178 U/min |
| Nenn-Drehzahl | 142 U/min |
| Nennmoment | 2,5 N·m |
| Spitzenmoment | 7 N·m |
| Nennleistung | 37 W |
| Nennphasenstrom | 3 A (rms) |
| Spitzenphasenstrom | 8,1 A (rms) |
| Effizienz | 63% |
| Motor-Rück-EMK-Konstante | 4,3 Vdc/Krpm |
| Drehmomentkonstante | 0,8 N·m/A |
| Motorwiderstand | 0,61 Ω |
| Motorinduktivität | 0.13 mH |
| Paar von Polen | 13 |
| Rücklaufmoment | 0.4 N·m |
| Spiel | ≤12 Bogenminuten |
| Lagertyp | Rillenkugellager |
| Axiallast | 0.25 KN |
| Radiallast | 1 KN |
| Trägheit | 0.17 Kg·cm² |
| Encoder-Typ | Doppel-Encoder ABS-17bit(Eingang)/18bit(Ausgang) |
| Kommunikation | CAN BUS / EtherCAT |
| Gewicht | 0.26 kg |
| Isolationsgrad | F |
Stillstandsmomentdaten
| Drehmoment (N·m) | Temperaturanstieg (°C) | Stillstandszeit (s) | Phasenstrom (A rms) |
|---|---|---|---|
| 3.75 | 20 | 15 | 4.3 |
| 5.0 | 48 | 10 | 5.7 |
| 6.25 | 31 | 8 | 7.4 |
| 7.5 | 59 | 5 | 8.6 |
Zubehör (Inklusive)
-
Netzteil + CAN BUS Kommunikationskabel ×1
-
120Ω Abschlusswiderstand ×1
-
EtherCAT Kommunikationskabel ×2
-
CAN BUS Kommunikationsmodul (USB-CAN Adapter) ×1
Anwendungen
Der MyActuator RMD-X2-7 ist ideal für Roboterarme, humanoide Roboter, Exoskelette, Gimbals und industrielle Automatisierungssysteme, bei denen präzise Drehmomentkontrolle, kompakte Größe und Dual-Channel-Kommunikation erforderlich sind.
Details

X2-7 bürstenloser Servomotor, dualer Encoder ABS-17BIT Eingang/18BIT Ausgang, 37W, 2.5N.m, 142rpm, CAN-Bus, 128, LED-Anzeige.

RMD X2-7 Planetenaktuator mit EtherCAT+CAN BUS dualem Encoder. Merkmale 28.17 Übersetzungsverhältnis, 24V Eingang, 142RPM Geschwindigkeit, 2.5N.m Drehmoment und 37W Leistung. Enthält Installationsmaße und technische Spezifikationen.

RMD-X2-P28-7 bietet einen doppelten Encoder, 24V Eingang, 2.5N.m Drehmoment, 142 RPM, CAN BUS/EtherCAT und ein Gewicht von 0.26kg. Enthält Installationszeichnung und detaillierte Spezifikationen wie Stillstandsdrehmoment und elektrische Daten.

X2-7 Schnittstelle umfasst VCC, GND, CAN_H, CAN_L, EtherCAT IN/OUT und T+/T-, R+/R- Anschlüsse. Verpackung: 65x65x55mm Box mit Netzteil, CAN-Kabel, 120Ω Widerstand, EtherCAT-Kabel und zwei CAN-Module. Kostenloser USB-CAN-Adapter pro Bestellung enthalten.
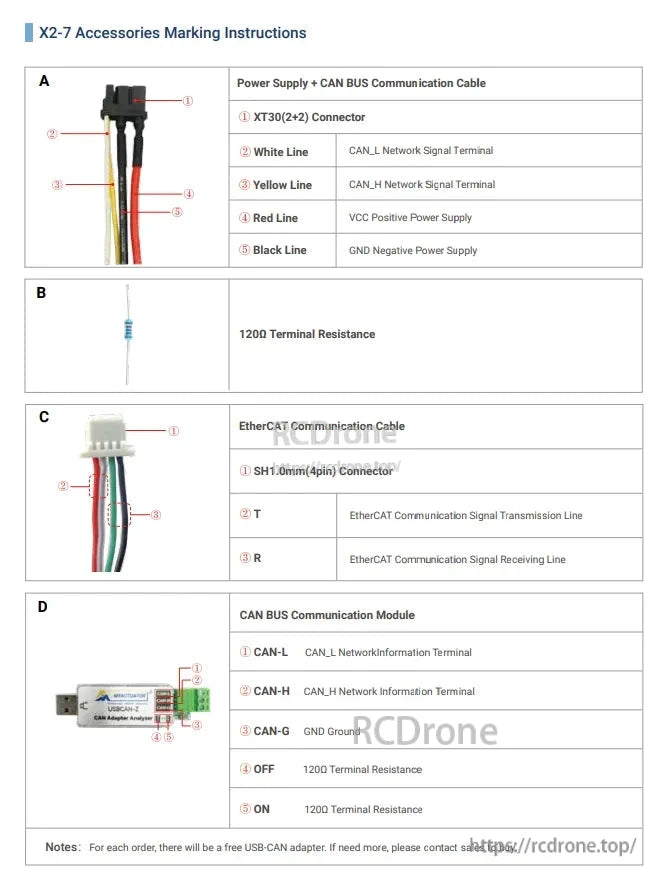
Kennzeichnungsanweisungen detaillieren die Stromversorgung, CAN BUS, EtherCAT-Kabel, Anschlüsse, Abschlusswiderstand. Enthält Hinweis zum USB-CAN-Adapter für Bestellungen.

Der MYACTUATOR X2-7 Servomotor liefert 37W Leistung und 2.5N.m Drehmoment, mit doppeltem Encoder, 1.42rpm Geschwindigkeit und einem Übersetzungsverhältnis von 1:28.Es enthält ein Netzteil, ein CAN-BUS-Kommunikationskabel, einen Abschlusswiderstand, EtherCAT-Kabel und ein CAN-Modul. Ein kostenloser USB-CAN-Adapter ist enthalten. Die mit VCC, GND, CANH, CANL und Signal I/O gekennzeichneten Anschlüsse gewährleisten eine einfache Einrichtung. CE- und RoHS-zertifiziert bietet es professionelle, zuverlässige und innovative Leistung.
Related Collections





