






MyActuator RMD-X4-10 Planetenaktuator 10N·m Doppel-Encoder EtherCAT+CAN Roboter-Gelenkantrieb
MyActuator RMD-X4-10 Planetenaktuator 10N·m Doppel-Encoder EtherCAT+CAN Roboter-Gelenkantrieb
MyActuator
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Der MyActuator RMD-X4-10 planetarische Aktuator ist ein Hochleistungs-DC-Motor-Gelenkmodul, das für fortschrittliche Robotikanwendungen entwickelt wurde. Mit einem 12,6:1 planetarischen Übersetzungsverhältnis, 10N·m Spitzendrehmoment und 100W Nennleistung integriert er ein doppeltes Encodersystem (17-Bit-Eingang / 18-Bit-Ausgang), das eine 0,01° Präzisionssteuerung bietet. Seine große Hohlstruktur unterstützt die Integration mehrerer Sensoren und ermöglicht einen zentralen Hub für die vollständige Körperhaltungskontrolle in humanoiden Robotern. Mit EtherCAT- und CAN-Dualprotokollkommunikation erreicht der Aktuator eine 250μs ultra-schnelle Reaktion, was ihn ideal für hochdynamische, hochzuverlässige Szenarien wie humanoide Roboter, bionische Beinantriebe und industrielle Automatisierung macht.
Hauptmerkmale
-
Hohe Präzision Doppel-Encoder: 17-Bit-Eingang / 18-Bit-Ausgang mit 0.01° Genauigkeit
-
Spitzenmoment 10N·m mit einem Planetengetriebe von 12,6:1
-
Kreuzrollenlager: Außergewöhnliche Biegefestigkeit für stabile Robotergelenke
-
EtherCAT + CAN-Bus-Dualkommunikation: Unterstützt die Verknüpfung mehrerer Maschinen, ultraschnelle Reaktionszeit von 250μs
-
Große Hohlstruktur: Ermöglicht die Integration von Sensoren, Kabeln und Schleifringen für komplexe Robotersysteme
-
Hohe Zuverlässigkeit: Entwickelt für die Steuerung des menschlichen Gangbildes, sanfte Übergänge beim Laufen, Springen und komplexen Bewegungen
-
Kompakt & Leicht: Φ55mm × 55,5mm, Gewicht 0.33kg
Technische Daten
| Parameter | Wert |
|---|---|
| Modell | RMD-X4-10 |
| Übersetzungsverhältnis | 12.6:1 |
| Eingangsspannung | 24V DC |
| Nenn-Drehzahl | 238 U/min |
| Leerlaufdrehzahl | 317 U/min |
| Nenn-Ausgangsleistung | 100W |
| Nenn-Drehmoment | 4N·m |
| Spitzen-Drehmoment | 10N·m |
| Nennstrom | 7.84A |
| Leerlaufstrom | 1A |
| Encoder-Typ | Doppel-Encoder (ABS-17bit / 18bit) |
| Kommunikation | EtherCAT + CAN-Bus |
| Gewicht | 0,33 kg |
| Größe | Ø55mm × 55.5mm |
Anwendungen
-
Humanoide Roboter – Gelenkantriebe für Arme, Beine und Rumpf
-
Bionische Bein-Antriebe – Hohe Drehmoment mit biegesteifem Design für Lauf- und Sprungbewegungen
-
Kollaborative Roboter – Sanfte Bewegungssteuerung für die industrielle Automatisierung
-
Exoskelette – Leichte, hochdynamische Aktuatoren für menschliche Hilfsvorrichtungen
-
Flexible Produktionslinien – Multi-Achsen-Synchronisation durch EtherCAT Hochgeschwindigkeitskommunikation
Verpackung & Zubehör
-
Stromversorgung + CAN-Bus Kommunikationskabel ×1
-
120Ω Abschlusswiderstand ×1
EtherCAT Kommunikationskabel ×2
-
CAN-Bus Kommunikationsmodul ×1 (USB-CAN-Adapter pro Bestellung enthalten)
Verpackungsmaße: 100mm × 100mm × 70mm
Details

RMD-X4-PT2.5-10-C Dual-Encoder-Roboter-Gelenkantrieb mit 24V Eingang, 12,6 Übersetzungsverhältnis, 4N·m Drehmoment und 100W Ausgang. Verfügt über eine CAN BUS/EtherCAT-Schnittstelle, 317RPM Leerlaufdrehzahl und ein Gewicht von 0,28kg. Enthält Installationsmaße und technische Spezifikationen.

Planetarischer Aktuator mit 10N.m Spitzendrehmoment, 12,6:1 Übersetzungsverhältnis, 0,33kg Gewicht. Größe: Ø55mm×55,5mm. Verfügt über EtherCAT/CANBUS-Kommunikation, Dual-Encoder, Hochgeschwindigkeits-Mikrocontroller, CAN-Chips und Rillenkugellager.

Dual-Encoder ABS-17BIT Eingang / 18BIT Ausgang, X4-10, SN:40225621, MYACTUATOR

Der RMD-X4-10 Planetarische Aktuator von MYACTUATOR bietet 100W Leistung, 46Nm Drehmoment, Dual-Encoder, 238rpm Geschwindigkeit. Wird mit Strom- + CAN BUS-Kabel, 120Ω Widerstand, EtherCAT-Kabel, CAN BUS-Modul und kostenlosem USB-CAN-Adapter geliefert.
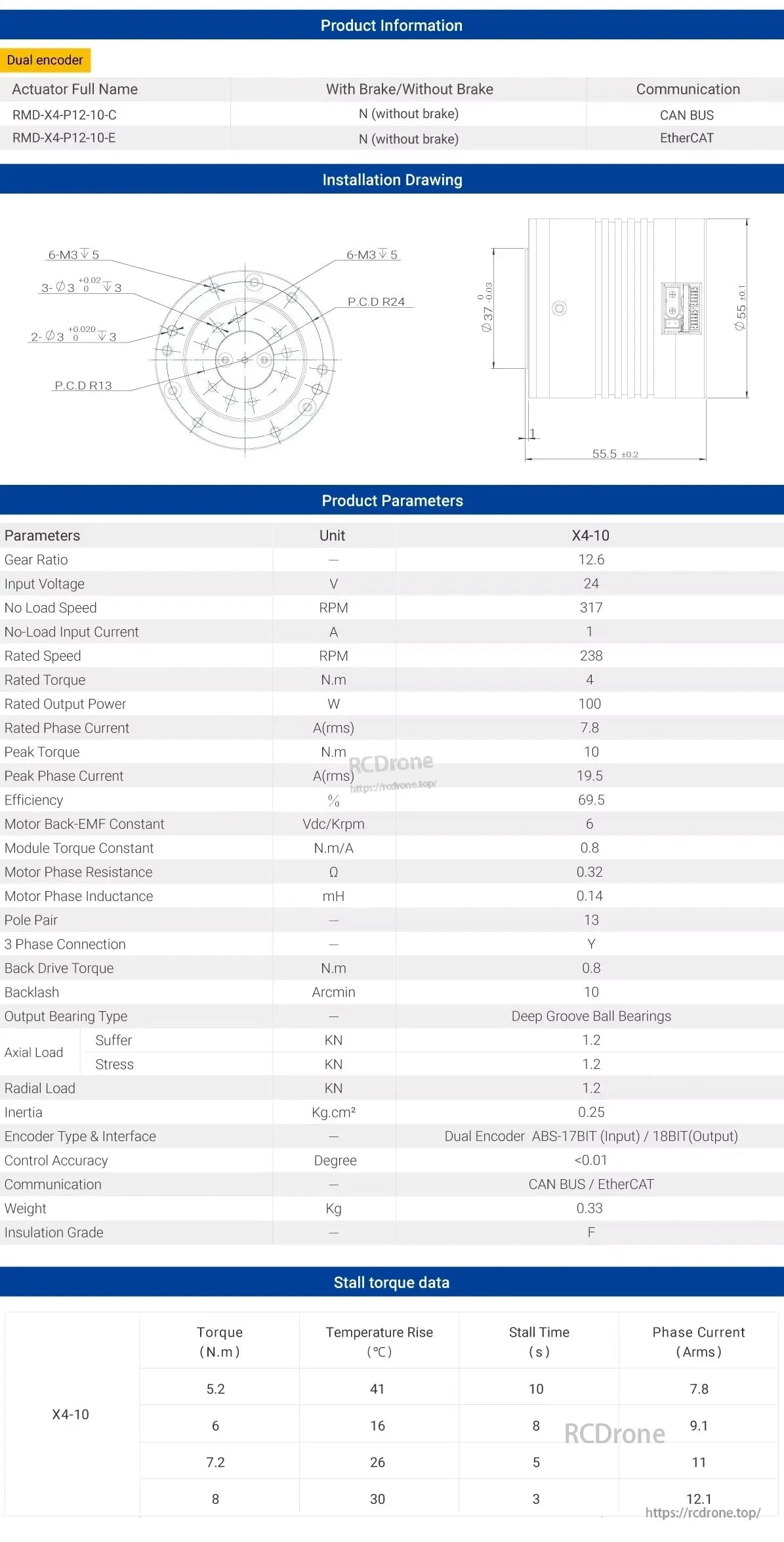
Der RMD-X4-10 Roboter-Planetarische Aktuator verfügt über einen Dual-Encoder, 12.6 Übersetzungsverhältnis, 24V Eingang, 100W Ausgang und CAN BUS/EtherCAT. Es liefert ein Drehmoment von 4N.m, eine Geschwindigkeit von 238 U/min, wiegt 0,33 kg und verwendet Rillenkugellager für hohe Effizienz.

Die X4-10-Schnittstelle umfasst Stromversorgung, CAN- und EtherCAT-Ports. Die Verpackung enthält Netzteil, Kabel, Widerstände und Modul. Abmessungen: 100x100x70mm. Enthält einen USB-CAN-Adapter mit jeder Bestellung.

Die X4-10-Zubehörteile umfassen Netzteil, CAN BUS- und EtherCAT-Kabel, Abschlusswiderstand und ein CAN BUS-Modul. Die Details umfassen Anschlüsse, Drahtfunktionen, Signalleitungen und Hinweise zum USB-CAN-Adapter.
Related Collections






