





MyActuator RMD-X4-36 34N·m Planetenaktuator DC bürstenloser Motor mit Dual-Encoder, EtherCAT & CAN-Bus, 36:1 Übersetzungsverhältnis
MyActuator RMD-X4-36 34N·m Planetenaktuator DC bürstenloser Motor mit Dual-Encoder, EtherCAT & CAN-Bus, 36:1 Übersetzungsverhältnis
MyActuator
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Der MyActuator RMD-X4-36 Planetary Actuator DC Brushless Motor ist ein Hochleistungs-Gelenkaktuator, der für Robotik- und Automatisierungssysteme entwickelt wurde, die präzise Bewegungssteuerung, hohe Drehmomentausgabe und kompakte Integration erfordern. Mit einem 34N·m Spitzenmoment, einem 36:1 Übersetzungsverhältnis und einer gekreuzten Rollenlagerstruktur bietet er hervorragende Biegefestigkeit und Langlebigkeit. Mit EtherCAT + CAN Dualkommunikationsprotokollen und einer 250μs ultraschnellen Reaktion ist dieser Aktuator ideal für humanoide Roboter, Roboterarme, mobile Plattformen und andere fortschrittliche Robotikanwendungen. Sein doppelter Encoder-Design (ABS 17-Bit-Eingang / 18-Bit-Ausgang) gewährleistet eine ultra-hohe Positioniergenauigkeit, während die kompakte Größe (55mm × 61mm, 0.36kg) eine leichte und effiziente Integration ermöglicht.
Hauptmerkmale
-
Hochpräziser Dual-Encoder: 17-Bit (Eingang) + 18-Bit (Ausgang) für eine Genauigkeit von 0,01°.
-
EtherCAT + CAN-Bus-Protokolle: Flexible Kommunikation mit 250μs ultraschneller Reaktionszeit.
-
Kreuzrollenlager: Überlegene Biegefestigkeit und lange Lebensdauer.
-
Hohe Leistungsdichte: Kompakte 55mm Durchmesser, 61mm Länge und nur 0,36kg Gewicht.
-
Spitzenmoment 34N·m und Nennmoment 11,5N·m gewährleisten eine stabile, kraftvolle Bewegungsabgabe.
-
Hohe Effizienz: 100W Nennleistung mit sanfter FOC (Feldorientierte Regelung) Technologie.
-
Vielseitige Anwendung: Entwickelt für humanoide Roboter, Exoskelette, Manipulatoren und Automatisierungssysteme.
Technische Daten
| Parameter | Wert |
|---|---|
| Modell | RMD-X4-P36-36-C |
| Eingangsspannung | 24V |
| Übersetzungsverhältnis | 36:1 |
| Leerlaufdrehzahl | 111 U/min |
| Leerlaufstrom | 0,9 A |
| Nenn-Drehzahl | 83 U/min |
| Nennmoment | 11,5 N·m |
| Nenn-Ausgangsleistung | 100 W |
| Spitzenmoment | 34 N·m |
| Spitzenphasenstrom | 21.5 A (rms) |
| Paar von Polen | 13 |
| Encoder-Typ | Doppel-Encoder ABS 17-Bit (Eingang) / 18-Bit (Ausgang) |
| Kommunikationsprotokolle | EtherCAT / CAN-Bus |
| Größe | Ø55mm × 61mm |
| Gewicht | 0.36 kg |
Lieferumfang
-
1 × RMD-X4-36 Planetarischer Aktuatorenmotor
-
1 × Netzteil + CAN-Bus Kommunikationskabel
-
1 × 120Ω Abschlusswiderstand
-
2 × EtherCAT Kommunikationskabel
-
1 × CAN-Bus Kommunikationsmodul (USB-CAN-Adapter)
Anwendungen
-
Humanoide und bionische Roboter
-
Kollaborative Roboterarme
-
Exoskelette und Rehabilitationsroboter
-
Serviceroboter und mobile Plattformen
-
Präzisionsautomatisierungssysteme, die kompakte, hochdrehmomentfähige Aktuatoren erfordern
Details

Planetarischer Aktuator mit 34N.m Spitzenmoment, 36:1 Übersetzungsverhältnis, 0.36 kg Gewicht, Ø55mm×61mm Größe. Merkmale: EtherCAT/CANBUS-Kommunikation, dualer Encoder, Hochgeschwindigkeits-MCU, CAN-Chips und gekreuzte Rollenlager.

RMD-X4-P36-36 Motor: 24V, 10,5N.m Drehmoment, 83RPM, dualer Encoder, EtherCAT+CAN BUS, 36 Übersetzungsverhältnis, 0,36kg, ABS-17BIT/18BIT Encoder, detaillierte Abmessungen enthalten.

X4-36 Motor, 100W, 12N.m, dualer Encoder, 17BIT Eingang, 18BIT Ausgang, 63rpm, 1:36 Übersetzungsverhältnis, CAN-Bus-Schnittstelle, LED-Anzeige.

MYACTUATOR X4-36 Motor, 100W, 12N.m, dualer Encoder, 83rpm, 1:36 Verhältnis. Enthält Netzteil, CAN BUS-Kabel, 120Ω Widerstand, EtherCAT-Kabel und CAN BUS-Modul mit kostenlosem USB-CAN-Adapter.
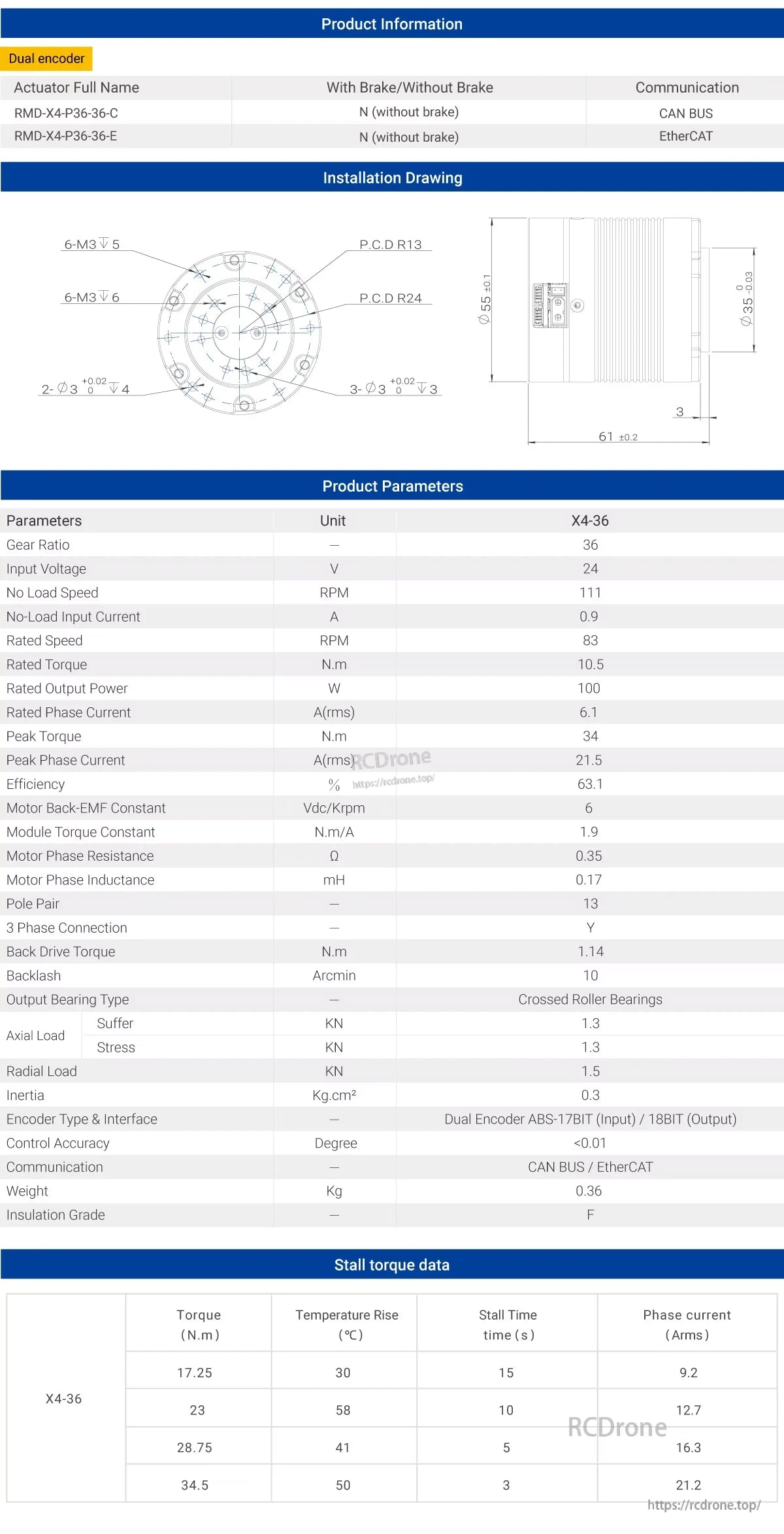
RMD-X4-P36-36 Motor hat einen dualen Encoder, 36 Übersetzungsverhältnis, 24V Eingang, 100W Ausgang, CAN BUS/EtherCAT. Nennmoment: 10,5 N.m, Geschwindigkeit: 83 RPM, Gewicht: 0,36 kg. Die Daten zum Stillstandsmoment umfassen Drehmoment, Temperaturanstieg, Zeit und Phasenstromwerte.

Die Schnittstellendetails umfassen Stromversorgung, CAN- und EtherCAT-Ports. Die Verpackung enthält Motor, Kabel, Widerstände und Kommunikationsmodule. Abmessungen: 100x100x70mm. Enthält USB-CAN-Adapter.
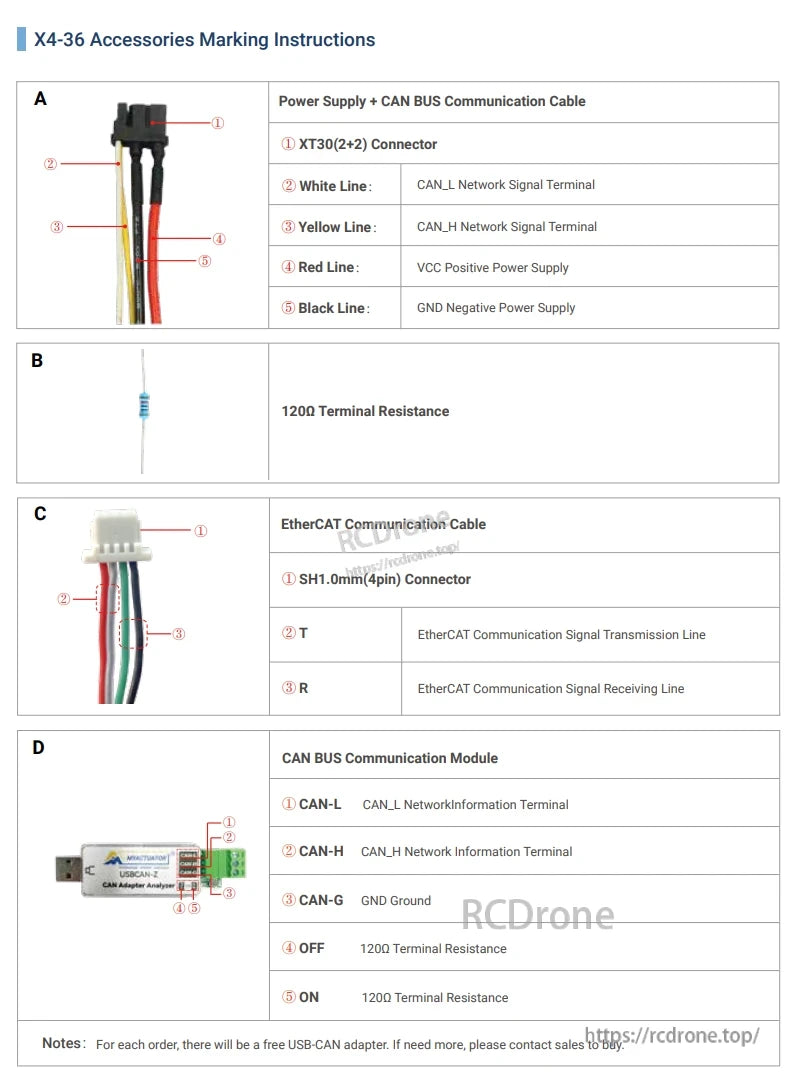
Die Zubehörteile für X4-36 umfassen Netzteil, CAN BUS, EtherCAT-Kabel, 120Ω Widerstand und CAN-Modul. Die Details umfassen Anschlüsse, Drahtfarben, Signalleitungen und Anschlusskonfigurationen für Kommunikations- und Stromverbindungen. USB-CAN-Adapter ist bei jeder Bestellung enthalten.
Related Collections





