





MyActuator RMD-X6-60 Dual-Encoder-Servoantrieb 320W 20N·m 60N·m Spitze 48V EtherCAT CAN BUS Hochpräziser Roboter-Gelenkmotor
MyActuator RMD-X6-60 Dual-Encoder-Servoantrieb 320W 20N·m 60N·m Spitze 48V EtherCAT CAN BUS Hochpräziser Roboter-Gelenkmotor
MyActuator
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Der MyActuator RMD-X6-60 intelligente Servoaktuator ist eine kompakte, leistungsstarke integrierte Antriebseinheit, die für Robotik, Automatisierung und präzise Bewegungssteuerungsanwendungen entwickelt wurde. Ausgestattet mit EtherCAT- und CAN-BUS-Kommunikationsschnittstellen und einem doppelten Encodersystem, bietet dieser Aktuator eine hohe Drehmomentdichte, präzise Steuerung und ein Multi-Mode-Bewegungsmanagement. Er ist ideal für Robotergelenke, Roboterarme, mobile Roboter und industrielle Automatisierungssysteme, die hohe Präzision und Zuverlässigkeit erfordern.
Wichtige Parameter:
-
Nennleistung: 320W
-
Nennmoment: 20N·m
-
Spitzenmoment: 60N·m
-
Nennumdrehungen: 153RPM
-
Übersetzungsverhältnis: 19.612:1
-
Duale Encoder-Präzision: 17-Bit Eingang / 17-Bit Ausgang
-
Kommunikationsprotokolle: CAN BUS, EtherCAT
-
Eingangsspannung: 48V
Hauptmerkmale
-
Duale Encoder-Design
Integrierte 17-Bit Eingangs- und Ausgangsencoders bieten präzises Feedback für eine genaue Bewegungssteuerung und Statusüberwachung. -
Multi-Protokoll-Unterstützung
Integrierte EtherCAT- und CAN BUS-Schnittstellen gewährleisten eine breite Kompatibilität mit verschiedenen Robotik- und Automatisierungssteuerungsplattformen. -
Hohe Leistungsdichte und Drehmoment
Fähig, 320W Dauerleistung und 60N·m Spitzendrehmoment zu liefern, um den Anforderungen dynamischer und schwerer Anwendungen gerecht zu werden. -
Hybride Steuerungsmodi
Unterstützt Position, Geschwindigkeit und Drehmoment-Hybridsteuerung, die fortschrittliche Mehrachsen- und koordinierte Bewegungssysteme ermöglicht. -
Hochpräzises Feedback und schnelle Reaktion
Integrierte Hochgeschwindigkeits-Mikrocontroller und CAN-Prozessoren bieten eine Reaktionszeit im Millisekundenbereich für präzise Steuerung. -
Kompakte und leichte Bauweise
Abmessungen von 120mm × 120mm × 80mm und ein Gewicht von 0,82kg machen es ideal für leichte Roboteranwendungen, bei denen Platz und Gewicht entscheidend sind.
Technische Spezifikationen
| Parameter | Wert |
|---|---|
| Modell | RMD-X6-P20-60-C |
| Eingangsspannung | 48V |
| Nennleistung | 320W |
| Nennmoment | 20N·m |
| Spitzenmoment | 60N·m |
| Nennumdrehungen | 153RPM |
| Leerlaufdrehzahl | 176RPM |
| Nennstrom | 9.5A (RMS) |
| Leerlaufstrom | 0.9A |
| Spitzenstrom | 29.1A (RMS) |
| Übersetzungsverhältnis | 19.612:1 |
| Polpaare | 10 |
| Encoder-Auflösung | Eingang: 17bit / Ausgang: 17bit |
| Gewicht | 0.82kg |
Schnittstellenbeschreibung
Strom- und Kommunikationsanschlüsse
| Anschluss | Beschreibung |
|---|---|
| EtherCAT_OUT | EtherCAT-Ausgangsanschluss |
| EtherCAT_IN | EtherCAT-Eingangsanschluss |
| CAN_L | CAN Low-Signalanschluss |
| CAN_H | CAN High-Signalanschluss |
| GND | Negative Stromversorgung |
| VCC | Positive Stromversorgung |
Signalanschlüsse
R+/R-: Feedback-Daten vom Modul zur Masterstation
-
T+/T-: Steuerbefehlsignale von der Masterstation zum Modul
Abmessungen und Struktur
-
Durchmesser: 120mm
-
Höhe: 80mm
-
Montagelöcher: P.C.D R26.25 und R22 mit 12 × M4 Gewindebohrungen
-
Ausgangswelle: Standardflansch-Schnittstelle für flexible Kupplung mit externen Komponenten
Verpackungsinformationen
| Enthaltene Artikel | Menge |
|---|---|
| Stromversorgung + CAN BUS Kommunikationskabel | 2 Stück |
| EtherCAT Kommunikationskabel | 2 Stück |
| 120Ω Abschlusswiderstand | 1 Stück |
| CAN BUS Kommunikationsmodul (USB-CAN Adapter) | 1 Stück |
Verpackungsmaße:
-
Länge × Breite × Höhe: 120mm × 120mm × 80mm
Zubehör und Verbindungen
Netzteil + CAN BUS Kabel
-
Stecker: XT30 (2+2)
-
Weiße Leitung: CAN_L Signal
-
Gelbe Leitung: CAN_H Signal
-
Rote Leitung: VCC positive Stromversorgung
-
Schwarze Leitung: GND negative Stromversorgung
EtherCAT Kommunikationskabel
-
Stecker: SH1.0mm (4-polig)
-
T-Leitung: EtherCAT Kommunikationssignalübertragung
-
R-Leitung: EtherCAT Kommunikationssignalempfang
CAN BUS Modul
-
Anschlüsse: CAN_L, CAN_H, CAN_G und schaltbare 120Ω Abschluss (AN/AUS)
-
USB-CAN Adapter kostenlos mit jeder Bestellung
Anwendungen
-
Kollaborative Robotergelenke
-
Service- und Humanoide Roboter
-
Mobile Roboterlenk- oder Antriebssysteme
-
Industrielle Roboterarme
-
Hochpräzise Bewegungssteuerungssysteme
Forschungs- und Bildungsplattformen
Zusammenfassung
Der MyActuator RMD-X6-60 Aktuator integriert hochpräzise Dual-Encoder, EtherCAT- und CAN-BUS-Kommunikationsprotokolle, hohe Drehmomentdichte und ein kompaktes Format, was ihn zu einer vielseitigen und zuverlässigen Lösung für Robotik und industrielle Automatisierung macht. Mit seiner 320W Leistung, 60N·m Spitzendrehmoment und 17-Bit Hochauflösungs-Feedback bietet dieser Servoantrieb außergewöhnliche Leistung und Steuerungsgenauigkeit für fortschrittliche Robotikprojekte.
Details
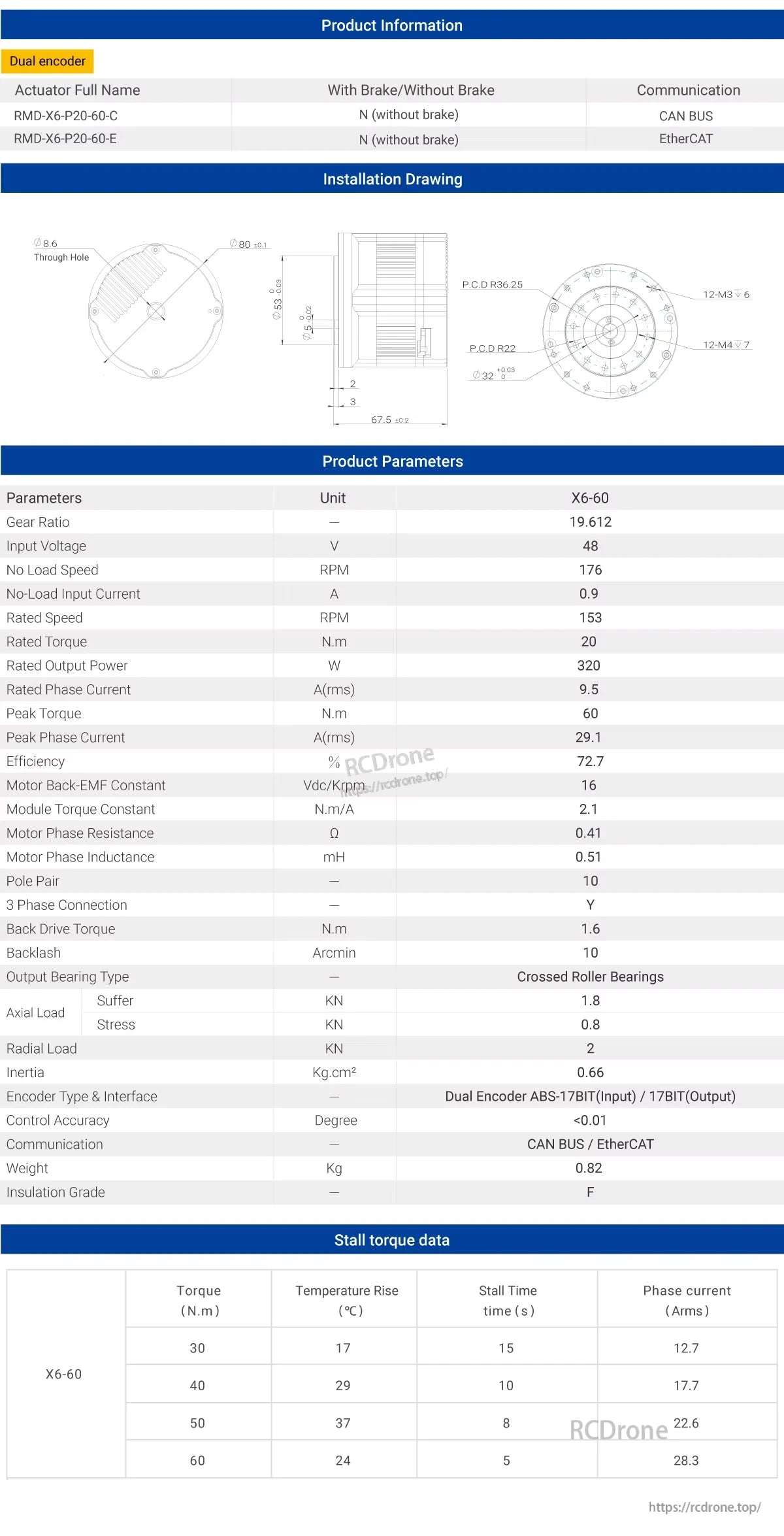
Der RMD-X6-60 Servoantrieb verfügt über einen Dual-Encoder, ein Übersetzungsverhältnis von 19,612, 48V Eingang, 320W Leistung, CAN BUS/EtherCAT Kommunikation, 20 N.m Nennmoment, 60 N.m Spitzendrehmoment und wiegt 0,82 kg.
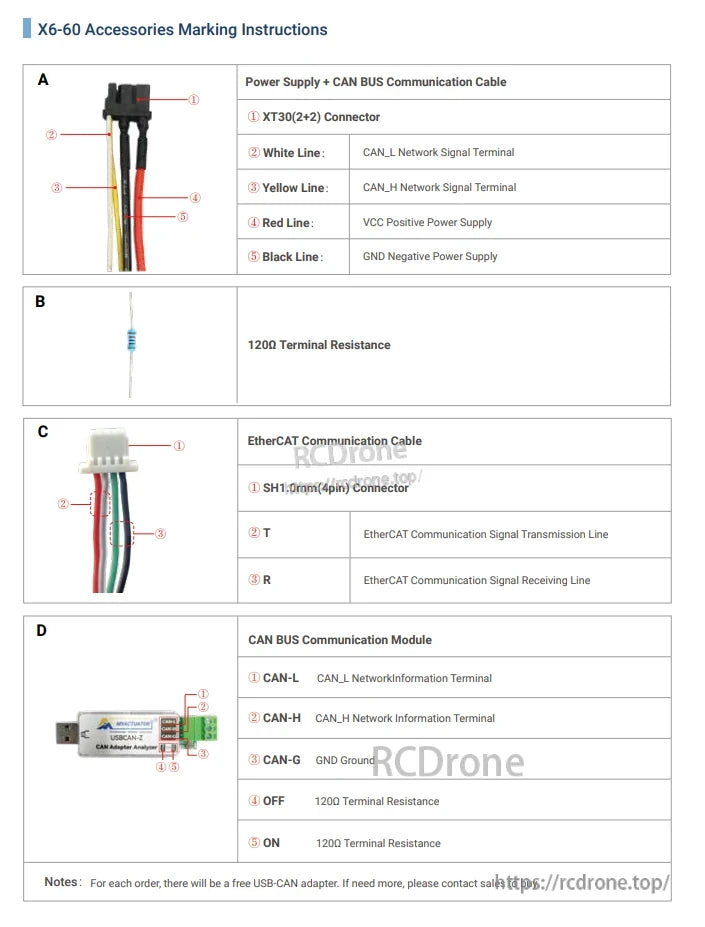
Die X6-60 Zubehörteile umfassen ein Strom- und CAN BUS-Kabel mit farbcodierten Drähten, 120Ω Abschlusswiderstand, EtherCAT-Kabel mit T/R-Leitungen und ein CAN BUS-Modul mit Anschlüssen für CAN-L, CAN-H, GND und Einstellungen für den Abschlusswiderstand. Ein kostenloser USB-CAN-Adapter ist pro Bestellung enthalten.

RMD-X6-P20-60-C Servoantrieb mit EtherCAT+CAN BUS, 19.612 Verhältnis, 48V Eingang, 153RPM Nenn-Drehzahl, 20Nm Drehmoment, 320W Ausgang, dualer Encoder, Hochgeschwindigkeits-Mikrocontroller und CAN-Chip, gekreuztes Rollenlager.
Dualer Encoder ABS-17BIT Eingabe/Ausgabe, X6-60 Servoantrieb, 300W, 20N.m, 128rpm, unterstützt hybride Kraft-Positionsregelung, präzise Drehmomentregelung.
X6-60 Servoantrieb, 320W, 20N.m, dualer Encoder, 158rpm, 1:20 Verhältnis, mit CAN BUS und EtherCAT-Kabeln, 120Ω Abschlusswiderstand, CE ROHS zertifiziert.

RMD-X6-60 Servoantrieb Verpackung mit CAN BUS Verkabelung, Stromkabel und 1200 Abschlusswiderstand.
Related Collections





