




MyActuator RMD-X8-120 Servomotor-Aktuator 48V 574W 110N·m Spitzendrehmoment Dual-Encoder EtherCAT CAN BUS für Roboter & Roboterarme
MyActuator RMD-X8-120 Servomotor-Aktuator 48V 574W 110N·m Spitzendrehmoment Dual-Encoder EtherCAT CAN BUS für Roboter & Roboterarme
MyActuator
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Der MyActuator RMD-X8-120 Servomotor integriert ein Planetengetriebe, doppelte 17-Bit Encoder und einen hochleistungsfähigen Antriebregler, der leistungsstarkes Drehmoment und präzise Bewegungssteuerung bietet. Mit einer Nennleistung von 574W, einem Nennmoment von 43N·m und bis zu 110N·m Spitzenmoment ist er ideal für humanoide Roboter, Roboterarme, vierbeinige Roboter und andere intelligente Automatisierungssysteme. Die Unterstützung von CAN BUS und EtherCAT-Protokollen gewährleistet eine nahtlose Integration mit modernen Robotikplattformen.
Wichtige Spezifikationen
| Parameter | Wert |
|---|---|
| Modell | RMD-X8-P20-120-C |
| Übersetzungsverhältnis | 19.612:1 |
| Spannung | 48V |
| Leerlaufdrehzahl | 158 U/min |
| Nenn-Drehzahl | 127 U/min |
| Leerlaufstrom | 1,6 A |
| Nennmoment | 43 N·m |
| Spitzenmoment | 110 N·m |
| Spitzenphasenstrom | 43,8 A (rms) |
| Nennleistung | 574 W |
| Gewicht | 1.4 kg |
| Abmessungen | Φ96 mm × 76 mm Höhe |
| Encoder-Typ | Doppel-Encoder ABS-17BIT (Eingang) / 17BIT (Ausgang) |
| Kommunikation | CAN BUS / EtherCAT |
Schnittstelle & Konnektivität
-
EtherCAT IN/OUT für Hochgeschwindigkeits-, Echtzeitkommunikation
-
CAN_H & CAN_L Anschlüsse für CAN BUS Vernetzung
-
VCC/GND für Stromversorgung (48V)
-
Signalwege (T-/T+/R-/R+) für Befehls- und Statusrückmeldung
Inklusive Zubehör
-
2× Stromversorgung + CAN BUS Kommunikationskabel
2× EtherCAT Kommunikationskabel
-
1× 120Ω Abschlusswiderstand
-
1× CAN BUS Kommunikationsmodul mit USB-CAN Adapter
Hauptmerkmale
-
Hochpräzise Steuerung – Dual 17-Bit-Absolute Encoder ermöglichen eine präzise Positionierungs-, Geschwindigkeits- und Drehmomentsteuerung.
-
Hohe Drehmomentausgabe – Nennmoment 43N·m, Spitzenwert 110N·m für anspruchsvolle Lasten.
-
Integriertes Design – Kompakte Bauweise mit Planetengetriebe und Antriebsmodul für einfache Installation.
-
Duale Protokollunterstützung – Kompatibel mit CAN BUS und EtherCAT für flexible Integration.
-
Robuste Bauweise – Hochfeste Kreuzrollenlager gewährleisten Langlebigkeit unter schweren Lasten.
Anwendungen
-
Humanoide Robotergelenke
-
Kollaborative Roboterarme
-
Quadrupedale und bipede Roboter
-
Exoskelettsysteme
-
Autonome mobile Plattformen
-
Hochpräzise industrielle Automatisierung
Details

Der M-RMD X8-120 Servoantrieb bietet einen Dual-Encoder, 48V Eingang, 43 N.m Drehmoment, 574W Leistung, CAN BUS/EtherCAT, 19.612 Übersetzungsverhältnis, 10 Polpaare, 1,40 kg Gewicht und Stallspezifikationen.
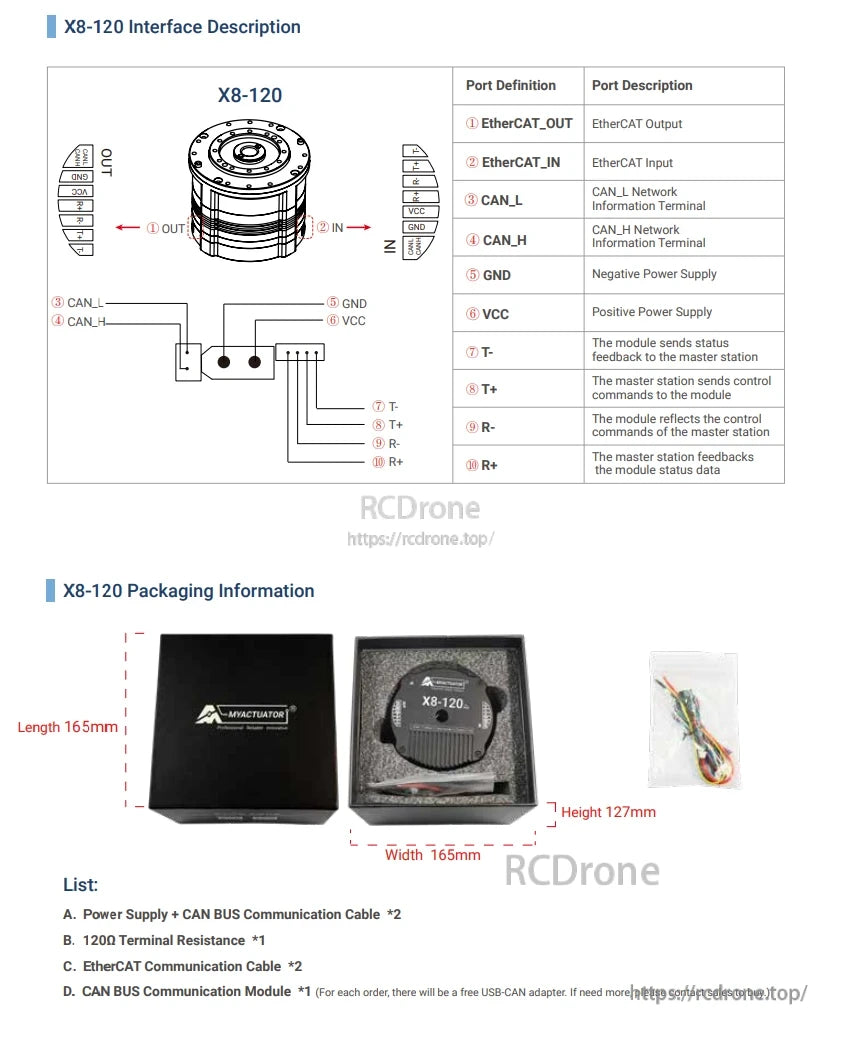
Die Servo-Schnittstelle X8-120 unterstützt EtherCAT und CAN-Bus, umfasst Strom- und Signalverbindungen sowie einen USB-CAN-Adapter. Verpackung: 165x165x127mm. Enthält Netzteil, Kabel, Abschlusswiderstand und Kommunikationsmodul.

Die MyActuator X8-120 Zubehörteile umfassen ein Netzteil mit CAN BUS-Kabel, 120Ω Abschlusswiderstand, EtherCAT-Kabel und CAN BUS-Modul. Die Details umfassen Stecker, Drahtfunktionen und Anschlüsse für Kommunikation und Stromversorgung. Ein kostenloser USB-CAN-Adapter ist pro Bestellung enthalten.

MyActuator X8-120 Servomotor, 574W, 45N.m, dualer Encoder, 127rpm, 1:20 Übersetzungsverhältnis. Enthält Strom- und CAN BUS-Kabel, EtherCAT-Kabel und 120Ω Abschlusswiderstand. CE ROHS zertifiziert.

EtherCAT + CAN BUS dualer Encoder Servomotor, Modell RMD-X8-P20-120-C, 48V, 19.612 Übersetzungsverhältnis, 127RPM, 43N.m Drehmoment, 574W Ausgang, 1.4kg Gewicht, ausgestattet mit Hochgeschwindigkeits-MCU, CAN-Chip und gekreuzten Rollenlagern.

Dualer Encoder ABS-17BIT Ein-/Ausgang, X8-120CL, unterstützt hybride Kraft-Positionsregelung, präzise Drehmomentregelung.

MYACTUATOR X8-120 Servomotor mit Stromversorgung, CAN BUS, EtherCAT-Kabeln und 120Ω Abschlusswiderstand. Die Verpackung enthält jeweils zwei Strom- und Kommunikationsleitungen.

Integriertes Planetengetriebe-Modul, dualer Encoder, EtherCAT/CAN-Kommunikation, Spitzenmoment 120N.m, Abmessungen 96mm×76mm, für Robotergelenke.
Related Collections




