





OYMotion ROH-AP001 Geschickte Roboterhand, 6 DOF, 11 Gelenke, Kraftsensoren, UART/RS485/CAN, PID-Steuerung, 0,7 s
OYMotion ROH-AP001 Geschickte Roboterhand, 6 DOF, 11 Gelenke, Kraftsensoren, UART/RS485/CAN, PID-Steuerung, 0,7 s
OYMotion
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Die OYMotion ROH-AP001 geschickte Hand ist eine Roboterhand mit 11 beweglichen Gelenken und 6 integrierten Motorantrieben, die 6 aktive Freiheitsgrade bieten. Ein integrierter PID-Motorsteuerungsalgorithmus ermöglicht präzises, wiederholbares Greifen und Manipulieren von Objekten. Jeder Finger integriert einen Kraftsensor zur Echtzeitüberwachung und geschlossenen Regelung der Greifkraft. Physikalische Schnittstellen umfassen UART, RS485 oder CAN FD, mit Unterstützung für das SerialCtrl dedizierte serielle Protokoll, ModBus-RTU und CAN-Protokoll. ROS/ROS2-Plattformen werden für die sekundäre Entwicklung über SDK unterstützt (Lizenzvereinbarung erforderlich).
Hauptmerkmale
- 6 aktive DOF und 11 Gelenke; unabhängig motorisierte Finger für einen natürlichen Griff.
- Integrierte Motorantriebe und PID-Steuerung; alle Aktuierungen in der Hand integriert.
- Kraftsensoren an jedem Finger mit taktilem Feedback und Echtzeit-Kraftsteuerung.
- Motorisierte Daumendrehung plus klappbares Fingerdesign.
- Touchscreen-Bedienung an den Fingerspitzen unterstützt.
- Schnelle Bewegung: 0,7 s vollständige Biegung/Streckung und 0,7 s vollständige Daumendrehung.
- Tragfähigkeit: bis zu 30 kg passive Last für vier Finger (gebogen), 10 kg pro Finger (gebogen), 8 kg pro Finger (gestreckt).
- Menschliche Größe und Proportionen; weiche Fingerkuppen und Silikongriff; maßgeschneidertes Handgelenkdesign; Nachrichtenpieper.
- Schnittstellen und Protokolle: UART/RS485/CAN mit SerialCtrl und ModBus-RTU; CAN bei 1M Baud.
- Verwendete Materialien: Aluminiumlegierung, Zinklegierung, Edelstahl, Silikon, Kunststoff.
Technische Daten
| Aktive DOF | 6 |
| Bewegliche Gelenke (Artikulationen) | 11 |
| Vertikale Distanz von der Spitze des Mittelfingers zum Handgelenk | 183 mm |
| Vertikale Distanz von der Daumenspitze zum Handgelenk | 95 mm |
| Daumengröße | 111 mm |
| Maximale Handflächenbreite | 82 mm |
| Handgelenkdurchmesser | 49 mm |
| Maximaler Öffnungs- und Schließwinkel der Daumenseite | 0~31 ° |
| Maximaler Öffnungs- und Schließwinkel von Daumen zur Handfläche | 0~50 ° |
| Daumen seitlicher Drehwinkel | 0~90 ° |
| Beugungs-/Streckzeit für den vollen Bereich bei maximaler Geschwindigkeit | 0.7 Sekunden |
| Rotationszeit des Daumens für den vollen Bereich bei maximaler Geschwindigkeit | 0,7 Sekunden |
| Aktivkraft jeder Fingerspitze im gestreckten Zustand | ≥0,5 Kgf |
| Aktivkraft jeder Fingerspitze im gebogenen Zustand | ≥1,0 Kgf |
| Maximale Aktivkraft der Daumenspitze | ≥1.0 Kgf |
| Maximale passive Last für vier Finger im gebogenen Zustand | 30 Kg |
| Maximale passive Last für jeden Finger im gebogenen Zustand | 10 Kg |
| Maximale passive Last für jeden Finger im gestreckten Zustand | 8 Kg |
| Finger-Touchscreen-Funktion | Unterstützt |
| Fingerkraft-Feedback | Unterstützt |
| Arbeitsumgebungstemperatur | -10 °C ~ +40 °C |
| Arbeitsumgebungsfeuchtigkeit | Maximale relative Luftfeuchtigkeit 85% |
| Design-Servicelebensdauer | 3 Jahre |
| Gewicht (einschließlich Handgelenk) | 640 g ± 5 g |
| Kommunikationsschnittstelle | UART/RS485/CAN |
| Baudrate | UART: 9600/19200/38400/57600/115200/230400/460800/921600; RS485: 9600/19200/38400/57600/115200/230400/460800; CAN: 1M |
| Unterstütztes Protokoll | UART: SerialCtrl, ModBus-RTU; RS485: SerialCtrl, ModBus-RTU; CAN: SerialCtrl |
| Materialien | Aluminiumlegierung; Zinklegierung; Edelstahl; Silikon; Kunststoff |
Anwendungen
- Roboter-Endeffektoren und humanoide Roboter.
- Bildungs- und Forschungsausrüstung.
- Bionische Prothesen.
- Industrielle Automatisierung und AGV-Systeme.
Für Bestellhilfe, Integrationsanleitungen oder technischen Support kontaktieren Sie bitte [email protected] or besuchen Sie https://rcdrone.top/.
Handbücher
Details

Die ROHand bietet eine Positionierungsgenauigkeit von ±1 mm durch integrierte PID-Motorsteuerung und bietet sechs aktive Freiheitsgrade, um menschliche Handbewegungen wie Greifen und Festhalten zu simulieren. Ideal für humanoide Roboter, robotische Endeffektoren, Inspektionssysteme, intelligente bionische Prothesen und Bildungs- oder Forschungsanwendungen unterstützt ihr Design vielseitige, präzise Manipulationen bei komplexen Aufgaben.
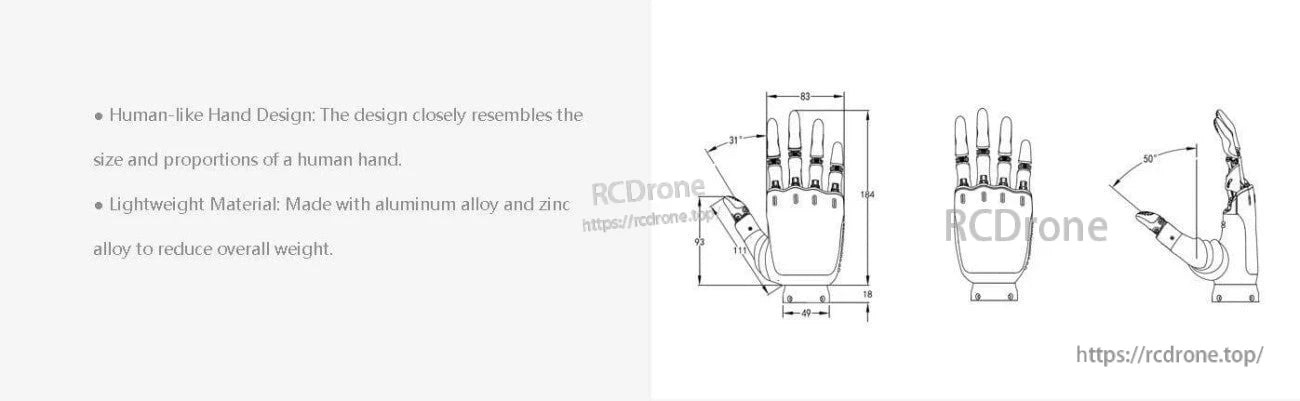
Menschlich wirkende, geschickte Roboterhand mit leichtem Aluminium-Zink-Legierung und präzisen Abmessungen.

Die OYMotion ROH-AP001 geschickte Roboterhand ahmt menschliche Proportionen nach und verfügt über bewegliche Finger und Sensoren für präzise, maßstabsgetreue robotische Manipulation.
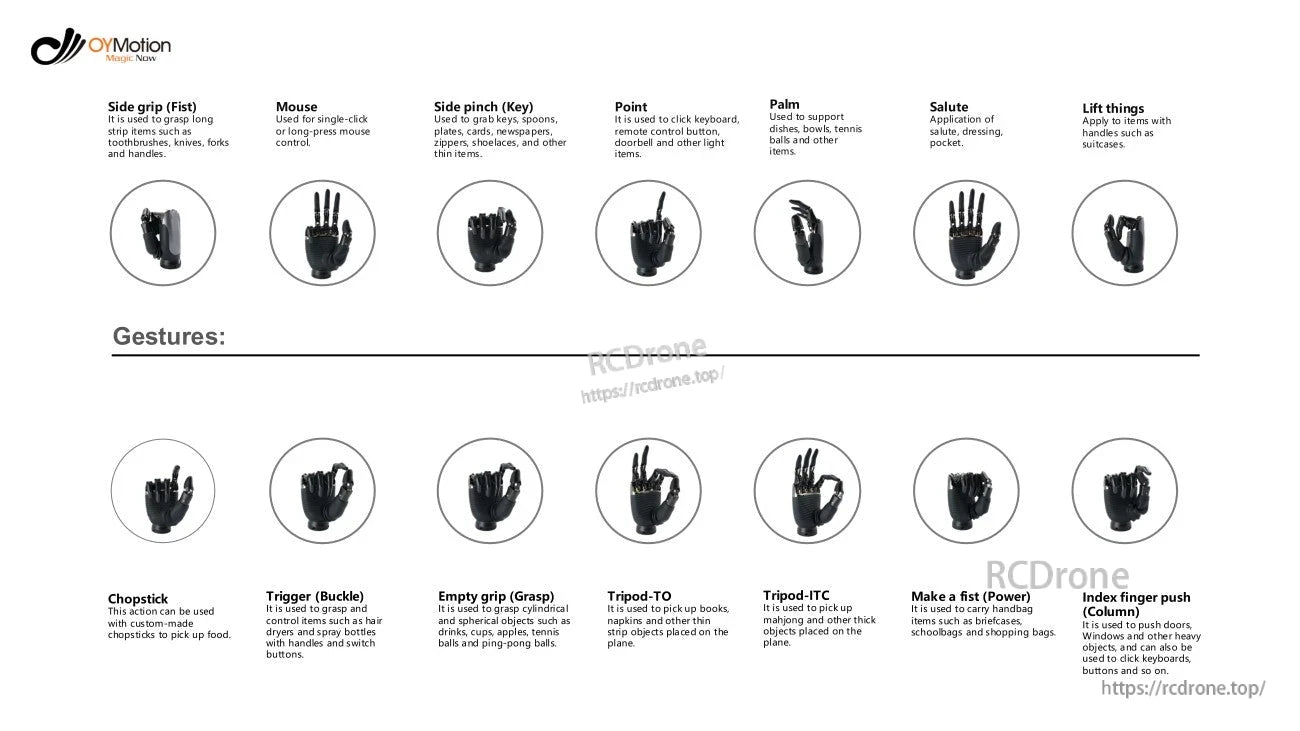
Die OYMotion Roboterhand führt 14 präzise Gesten aus – wie Greifen, Zeigen und Heben – um alltägliche Aufgaben wie die Benutzung von Essstäbchen, das Tragen von Taschen oder das Klicken auf Tastaturen zu bewältigen, und zeigt dabei fortschrittliche Geschicklichkeit und praktische Nützlichkeit.

Die OYMotion Roboterhand bietet motorisierte Finger, ein zusammenklappbares Design, weiche Polster, einen motorisierten Daumen, einen Silikongriff, integrierte Aktuation, einen Signalgeber, ein benutzerdefiniertes Handgelenk und einen RS485-Anschluss für einen geschickten, natürlichen Griff.
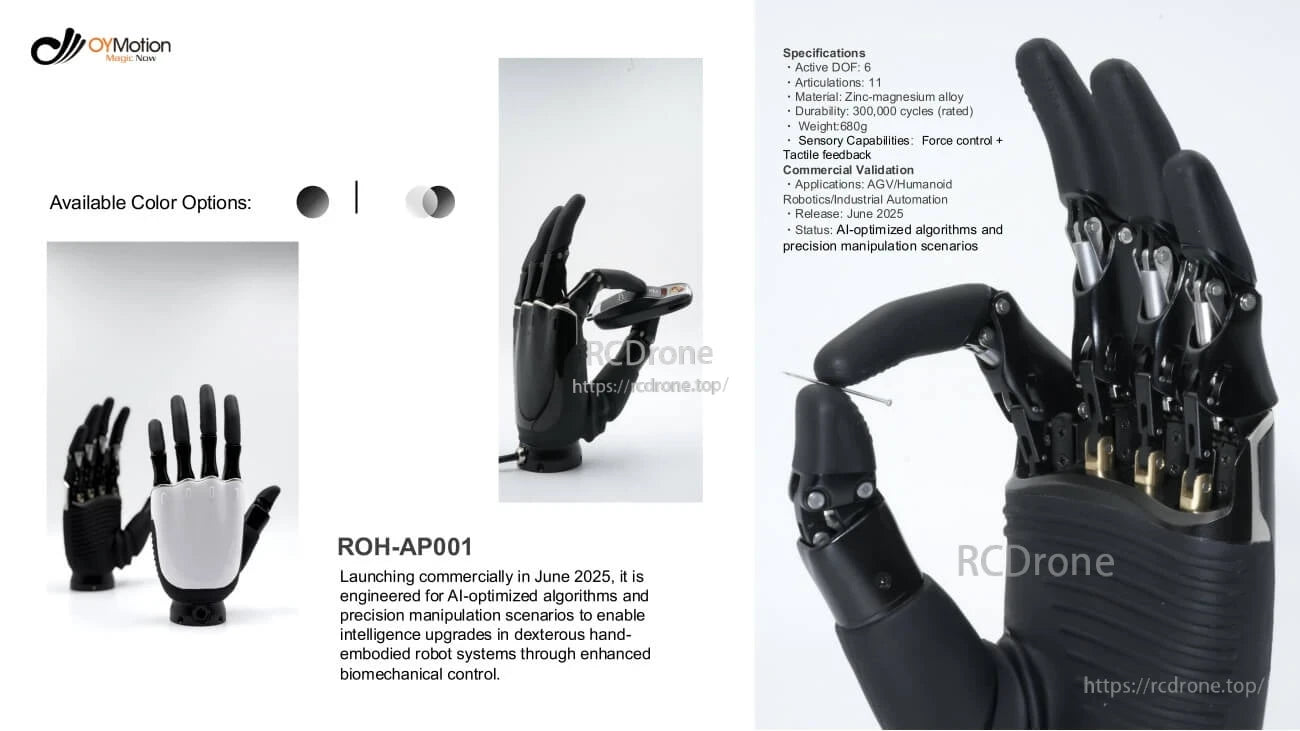
Die OYMotion ROH-AP001 geschickte Roboterhand hat 6 aktive DOF, 11 Gelenke, eine Bauweise aus Zink-Magnesium-Legierung, eine Haltbarkeit von 300.000 Zyklen, wiegt 680 g und bietet Kraft-/Tastfeedback für KI- und Präzisionsaufgaben – Markteinführung im Juni 2025.

Die OYMotion ROH-AP001 Roboterhand verfügt über motorisierte Finger, einen motorisierten Daumen, einen Silikongriff und eine integrierte Betätigung. Sie besteht aus Aluminium, Zink, Stahl, Silikon und Kunststoff und umfasst einen Summer, ein benutzerdefiniertes Handgelenk, das RS485-Protokoll, ein klappbares Design und Druckfedern.
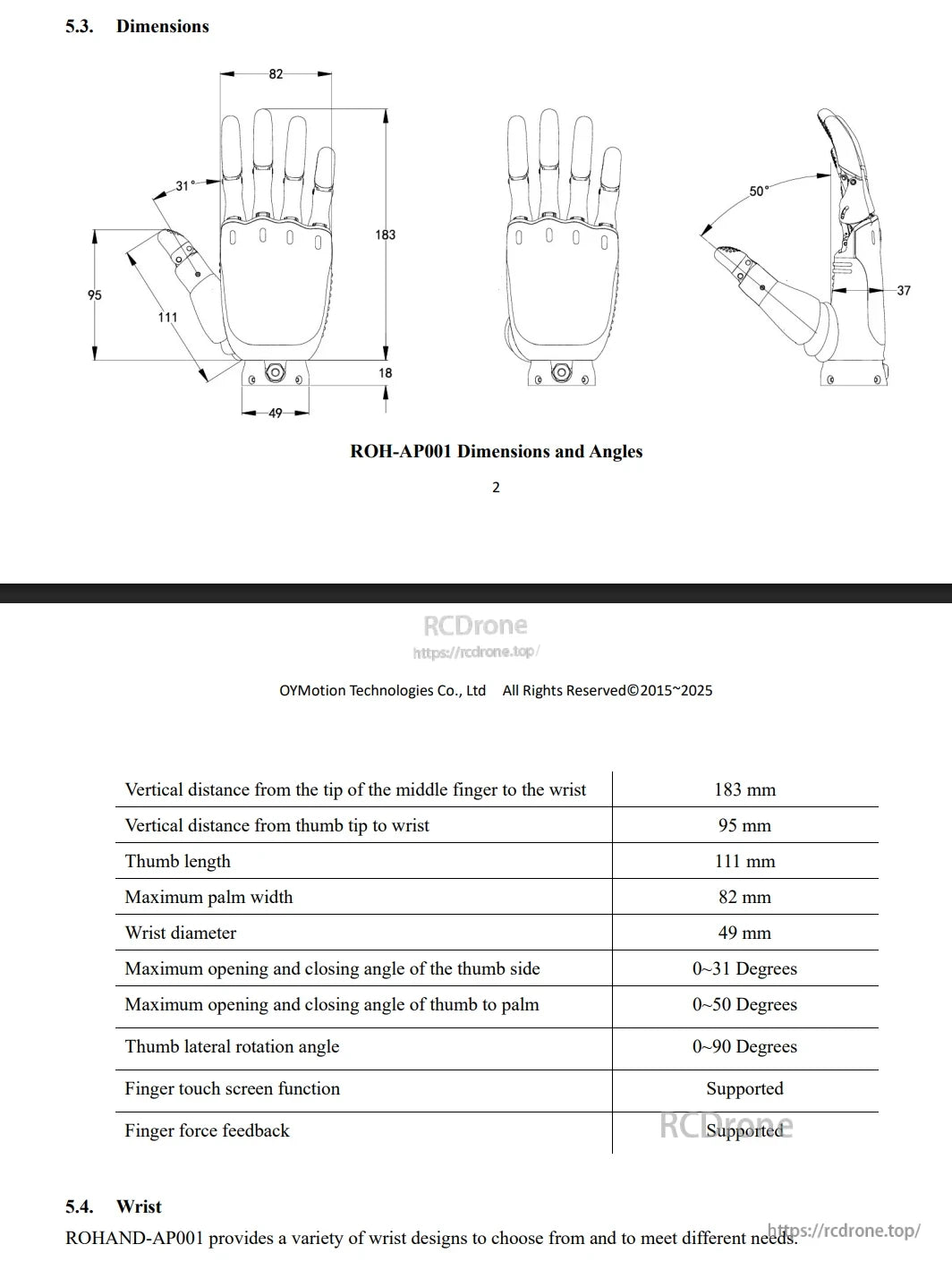
Die Abmessungen der ROH-AP001 Roboterhand umfassen eine Höhe von 183 mm vom Finger bis zum Handgelenk, 95 mm vom Daumen bis zum Handgelenk, 111 mm Daumenlänge, 82 mm Handflächenbreite und einen Handgelenksdurchmesser von 49 mm. Daumenwinkel: 0-31° seitlich, 0-50° zur Handfläche, 0-90° Drehung. Unterstützt Touchscreen und Kraftfeedback.
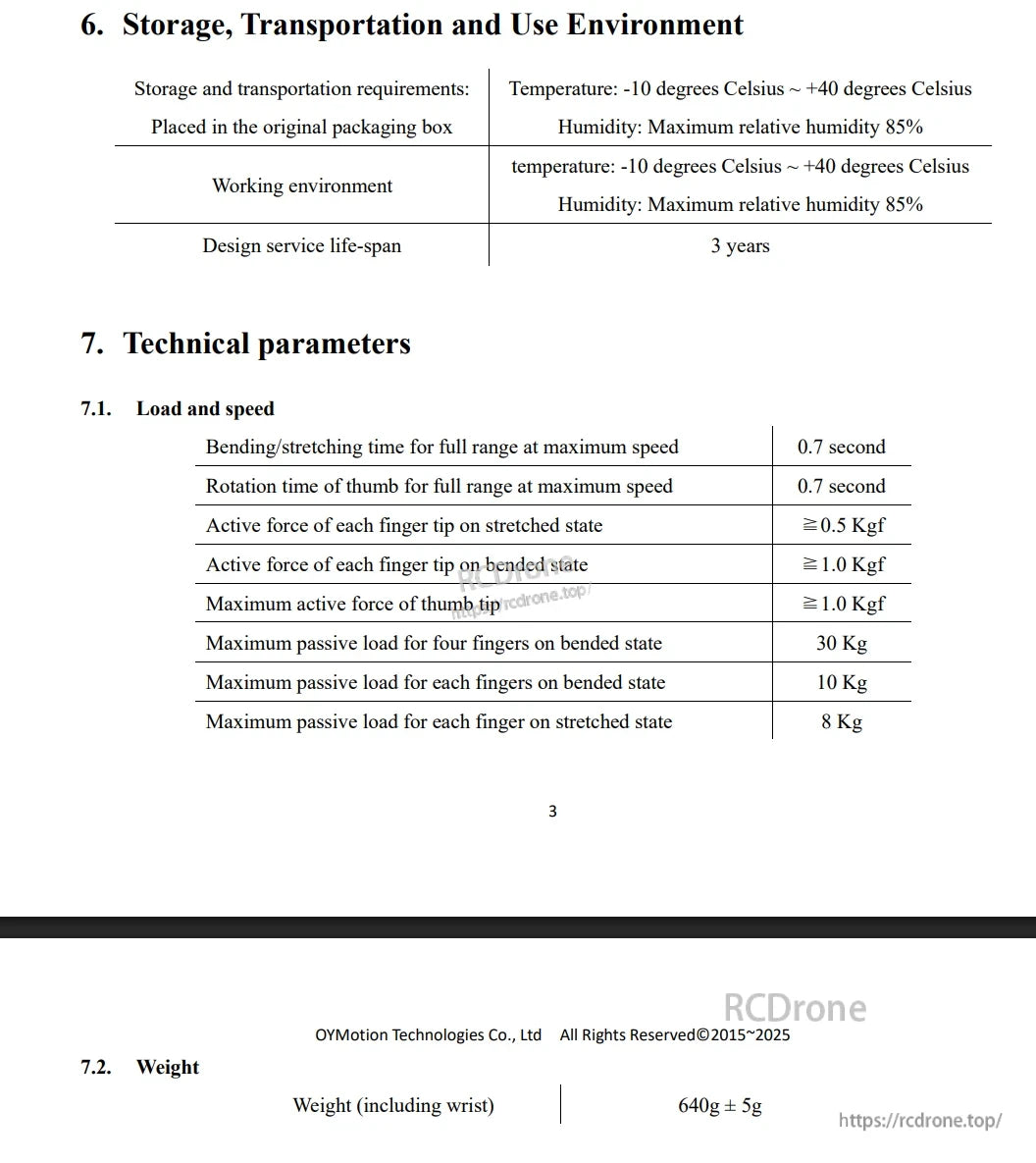
Die OYMotion ROH-AP001 Roboterhand funktioniert bei Temperaturen von -10°C bis +40°C und maximal 85% Luftfeuchtigkeit. Lebensdauer des Designs: 3 Jahre. Gewicht: 640 g ±5 g. Aktive Kraft der Finger ≥0,5–1,0 Kgf; passive Last bis zu 30 kg für vier Finger.
Related Collections





