Pixhawk 2.4.8 PX4 PIX 32 Bit Flight Controller SPEZIFIKATIONEN
Verwendung: Fahrzeuge und ferngesteuerte Spielzeuge
Teile/Zubehör aktualisieren: Rahmen
Werkzeugzubehör: Geschliffen
Technische Parameter: Wert 3
Fernbedienungsperipheriegeräte/-geräte: Fernbedienung
Alter empfehlen: 12+J,14+J
RC-Teile und Zubehör: Geschwindigkeitsregler
Herkunft: Festlandchina
Modellnummer: Pixhawk 2.4.8
Material: Metall
Allradantriebsattribute: Motoren
Für Fahrzeugtyp: Flugzeuge
Markenname: Readytosky
ReadyToSky ist ein professioneller Anbieter von FPV-RC-Modulzubehör. Wenn Sie mehr über Großhandels- oder Großeinkaufoptionen erfahren möchten, können Sie sich gerne an uns wenden.
Funktionen:
Pixhawk 2.4.8 unterstützt die neueste offizielle Arduino-Firmware und PX4-Firmware.
1. Die fortschrittlichen 32-Bit-ARM-CortexM4-Hochleistungsprozessoren (2 MB Flash) können das Echtzeitbetriebssystem NuttX RTOS ausführen;
2. 14 PWM / Servo-Ausgang;
3. Busschnittstelle (UART, I2C, SPI, CAN);
4. Die integrierte Backup-Stromversorgung und der Backup-Controller fallen aus, der primäre Controller schaltet auf die Backup-Steuerung um und ist sicher;
5. Stellen Sie automatische und manuelle Modi bereit;
6. Stellen Sie redundante Stromversorgung und Failover bereit;
7. Mehrfarbige LED-Leuchten;
8. Stellen Sie eine Mehrton-Summer-Schnittstelle bereit
9. Micro-SD-Aufzeichnung von Flugdaten;
Spezifikationen:
Schnittstelle
1.5 Hochspannungskompatibler UART 1, 2 mit Hardware-Flusskontrolle
2. 2 CAN
3.Spektrum DSM / DSM2 / DSM-X Satellitenempfänger-kompatibler Eingang
4.Futaba SBUS-kompatible Ein- und Ausgänge
5.PPM-Signaleingang
6.RSSI (PWM oder Spannung) Eingang
7.I2C
8.SPI
9.3.3 und 6,6VADC Eingang
10. Externe MICRO-USB-Schnittstelle
Pixhawk OSD OLED Display für Pixhawk 2.4.8 PIX PX4 Flight Control Fluganzeige Flugstatus Verbunden mit I2C-Schnittstelle
Es eignet sich zur Flugsteuerung von Pixhawk usw. und wird zur Anzeige der Statusinformationen von Flugzeugen verwendet. Dieses Modul wird an die I2C-Schnittstelle von Pixhawk angeschlossen
Hinweis: Um die Firmware des Displays auf 3.5 oder höher zu aktualisieren, setzen Sie NTF_DISPLAY_TYPE im Massion Planner auf 1 und starten Sie Pixhawk neu.
WIE verwende ich das WLAN-Modul für PIXHAWK?
1.Wie verbinde ich mich?
Verwenden Sie eine 6P-Leitung, um eine Verbindung zum Pixhawk-Flugcontroller herzustellen.
Aufgrund der unterschiedlichen Firmware können bei manchen Firmwares zwei Ports genutzt werden, bei manchen Firmwares kann nur einer der Ports genutzt werden. Suchen Sie also einen der verfügbaren Ports für die Verbindung.
Wenn Sie PX4-Firmware verwenden, kann nur TELEM1 verwendet werden, TELEM2 kann nicht verwendet werden.
Für die Ardupilot-Firmware wird die Verwendung des TELEM2-Ports empfohlen. Oder suchen Sie einen der verfügbaren Ports für die Verbindung.
Für PX4-Firmware sollte der TELEM1-Port verwendet werden.
2.Wie benutzt man?
Bitte beachten Sie: Bei Verwendung einer WLAN-Funktelemetrieverbindung muss ein 3DR-Stromversorgungsmodul oder ein 5-V-Regler verwendet werden, um die Flugsteuerung mit Strom zu versorgen. USB kann nicht angeschlossen werden, da die USB-Priorität höher ist als die Radiotelemetrie. Wenn das USB-Kabel eingesteckt ist, kann es nicht für die Funktelemetrieübertragung verwendet werden.
Der Name des WLAN-Hotspots ist Drone. Stellen Sie also über ein Telefon oder einen Computer eine Verbindung zu diesem Hotspot her. Das Passwort lautet 12345678.
Hinweis: Einige Geräte (z. B. ein iPhone-IOS-System) können die IP-Adresse nicht automatisch abrufen. Sie sollten die IP-Adresse manuell festlegen.
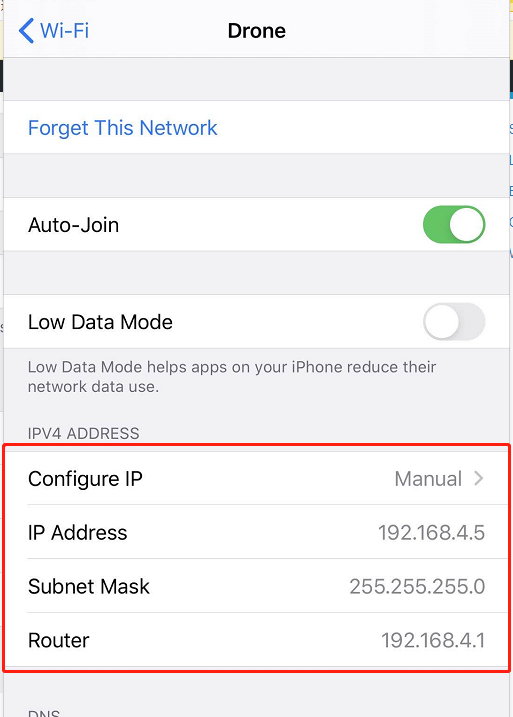
Stellen Sie die Konfigurations-IP auf „Manuell“ ein. Stellen Sie die IP-Adresse auf „192.168.4.5“ oder einen anderen ein, kann aber nicht auf „192.168.4.1“ eingestellt werden. Die letzte Zahl darf 254 nicht überschreiten. Stellen Sie die Subnetzmaske auf „255.255.255.0“ ein (dieser Wert sollte eingestellt werden, kein anderer). Stellen Sie den Router auf „192.168.4.1“ ein (sollte diesen Wert festlegen, kein anderer Wert möglich)
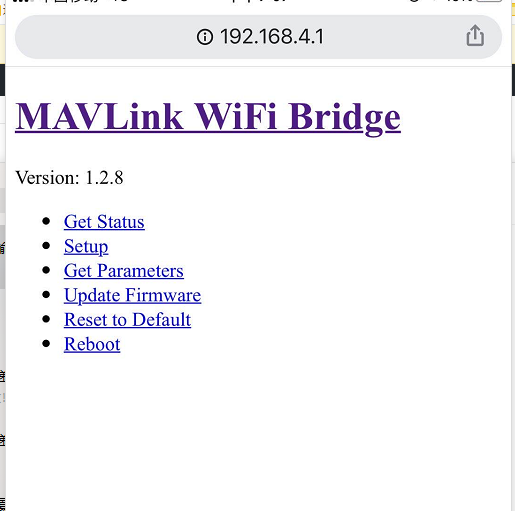
Wenn Ihr Gerät erfolgreich eine Verbindung zu diesem Hotspot herstellt, können Sie über den Browser auf „http://192.168.4.1“ zugreifen und die Parameter ändern.
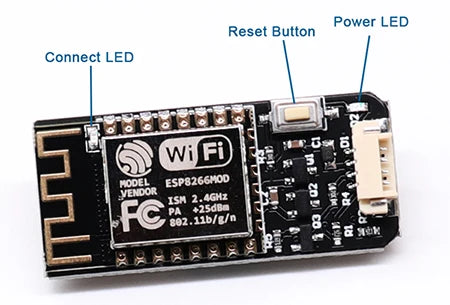
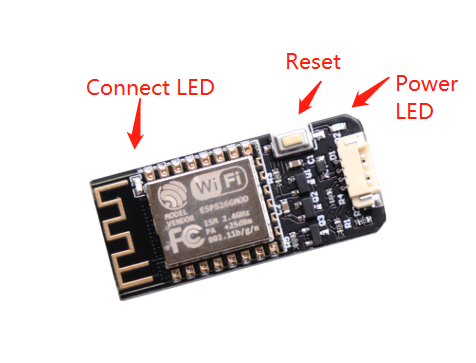
Beachten Sie, dass es sich bei der Schaltfläche um eine Reset-Taste und nicht um eine Neustart-Taste handelt. Wenn Sie die Taste drücken, werden alle Parameter auf die Standardeinstellungen zurückgesetzt, wenn Sie einen Parameter ändern.
Power-LED: Beim Einschalten leuchtet die rote LED.
LED verbinden: Bei erfolgreicher Verbindung mit der Bodensteuerung (z. B. Mission Planner oder Qgroundcontrol) blinkt die blaue LED. Bei Trennung von der Bodensteuerung leuchtet die blaue LED.
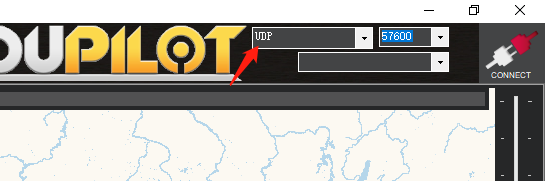
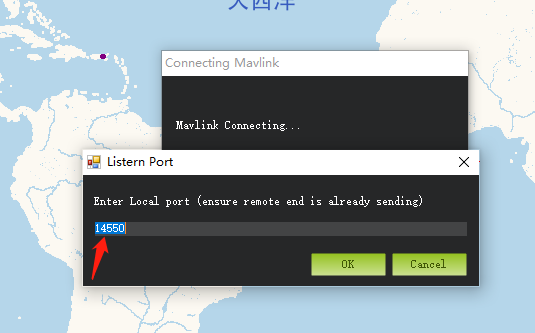
1.Wie verwende ich den Missionsplaner?
Verbinden Sie zunächst Ihren PC erfolgreich mit der Hotspot-Drohne. Wählen Sie UDP aus. Klicken Sie dann auf die Schaltfläche „Verbinden“ und verwenden Sie den Port 14550. Klicken Sie auf „Ok“. Die Baudrate muss nicht ausgewählt werden. Die Standard-Baudrate des WLAN-Moduls beträgt 57600. Es kann aber auch 115200 oder eine andere Baudrate funktionieren.
2.Verwendung für Telefon
Für Android: Laden Sie qgroundcontrol herunter (nur für Pixhawk, nicht für APM)
von hier aus,http://qgroundcontrol.com/downloads/
Laden Sie DroidPlanner hier herunter,https://github.com/DroidPlanner/Tower/releases
Für iPhone (IOS): Suchen Sie im App Store nach qgroundcontrol.
qgroundcontrol (nur für pixhawk, nicht für APM) kann automatisch eine Verbindung herstellen. DroidPlanner sollte „UDP“ und „14550“-Port auswählen, bevor eine Verbindung zu Groundcontrol hergestellt wird.
WIFI V3.0 verwendet 32-Bit-CPU, unterstützt TCP und UDP
WIFI V3.0 DroneBridge-Website
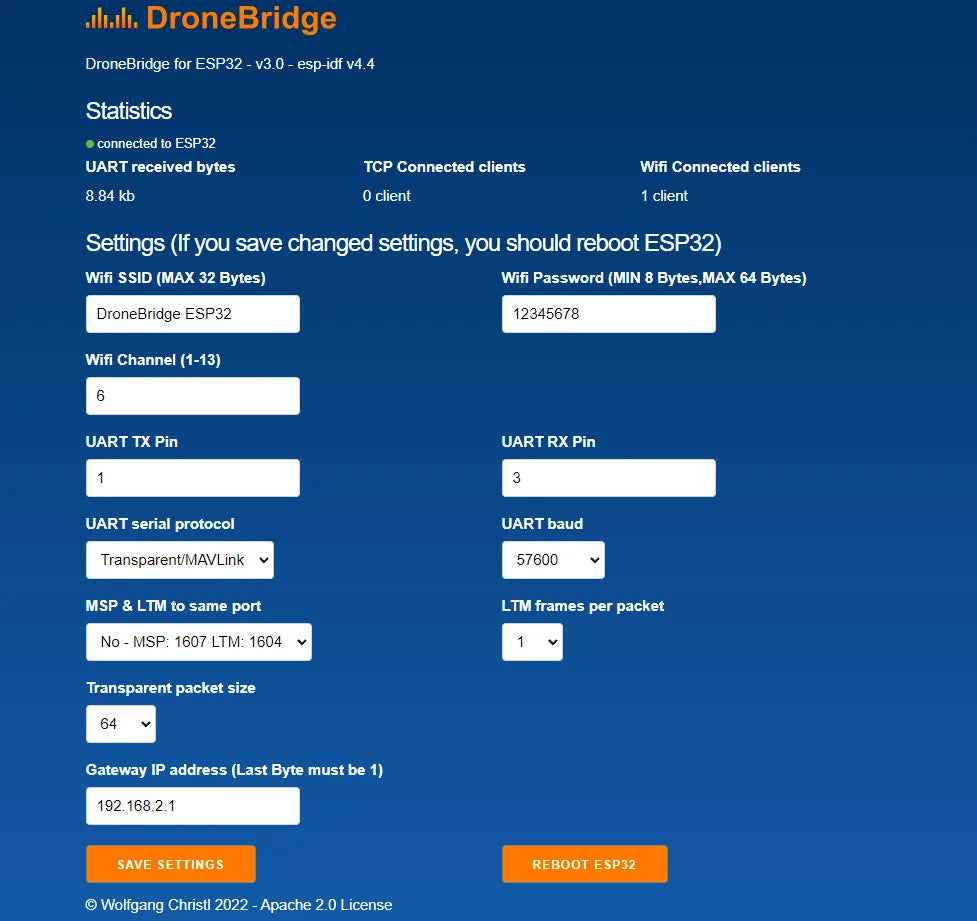
ulul; DroneBridge für ESP32 v3.0 esp idf v4.4 Statistik verbunden mit ESP 32 UART empfangene Bytes TCP Verbundene Clients WLAN-Passwort (MIN. 8 Byte, MAX. 64 Byte) Wenn Sie geänderte Einstellungen speichern, sollten Sie ESP33 neu starten.
(senden Sie es als Ihre Wahl)

Pixhawk 2.4.8 FC + 4G TF-Karte + MBN GPS GPS-Halter + OSD + Leistungsmodul Stoßdämpfer I2C PPM RGB Sicherheitstaste Summer Wifi Telemetriekabel Ontk 'GPs-Modul PPM 1'

Das Paket enthält: Pixhawk 2.4.8 Flugcontroller, eine 4G-TF-Karte, Stoßdämpfer, I2C-Modul, PPM-Modul, RGB-Modul, OLED-Display, Sicherheitstaste mit Summer und Kabel für alle Komponenten.
Das Paket enthält: Pixhawk 2.4. 8 Flugcontroller, eine 4G-TF-Karte, MBN-GPS-Modul, GPS-Halter, Stoßdämpfer, I2C-Sicherheitstaste, Summerkabel und ein optionales Telemetriemodul für drahtlose Datenübertragung.

Das Paket beinhaltet: Pixhawk 2.4.8-Flugsteuerung, 4G-TF-Karte, Stoßdämpfer, OLED-Display, I²C-Modul, PPM-Modul (Pulse Position Modulation), Sicherheitstaste mit Summer und Kabel.

Dieser Pixhawk 2.4.8-Flug Der Controller wird mit einer 4G-TF-Karte, einem Sicherheitsknopf, einem Summer und Kabeln für Hilfsausgänge geliefert. Es verfügt außerdem über ein TELEM-Modul mit zwei Stromeingängen, einem seriellen Anschluss und ADC-Kanälen (Analog-Digital-Wandler). Darüber hinaus verfügt es über GPS-Funktionen und erfordert Strom, um zu funktionieren.

VCC, GPS und SD-Kartenkalibrierung sind im Modus „Stabilisiert“ mit einer Batteriespannung von 11,32 V erforderlich. Darüber hinaus sind keine GPS-Daten verfügbar. Die Voraktivierung wurde vorgenommen und EKF (Extended Kalman Filter) ist aktiviert.