Pixhawk PX4 PRO PIX 32 Bit Flight Controller Autopilot – mit 4G SD RC Quadcopter Ardupilot ArduPlane ArduRover
Pixhawk PX4 PRO PIX 32 Bit Flight Controller Autopilot – mit 4G SD RC Quadcopter Ardupilot ArduPlane ArduRover
RCDrone
Verfügbarkeit für Abholungen konnte nicht geladen werden
Pixhawk PX4 PRO PIX 32 Bit Flight Controller Autopilot SPEZIFIKATIONEN
Radstand: Bodenplatte
Verwendung: Fahrzeuge und ferngesteuertes Spielzeug
Teile/Zubehör aktualisieren: Rahmen
Werkzeugzubehör: Assemblierte Klasse
Technische Parameter: KV1100
Größe: 80*48*15
Fernbedienungsperipheriegeräte/-geräte: Fernbedienung
Alter empfehlen: 12+J,14+J
RC-Teile und Zubehör: Motorkomponenten
Menge: 1 Stück
Herkunft: Festlandchina
Modellnummer: PIXHAWK PRO
Material: EVA
Allradantriebsattribute: Baugruppe
Für Fahrzeugtyp: Flugzeuge
Markenname: rctosky

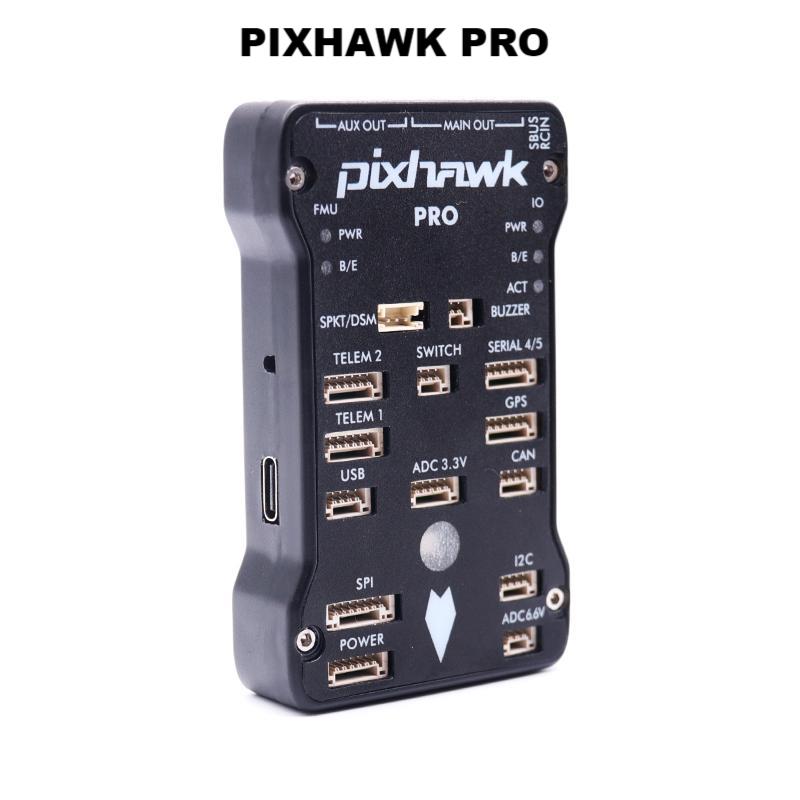
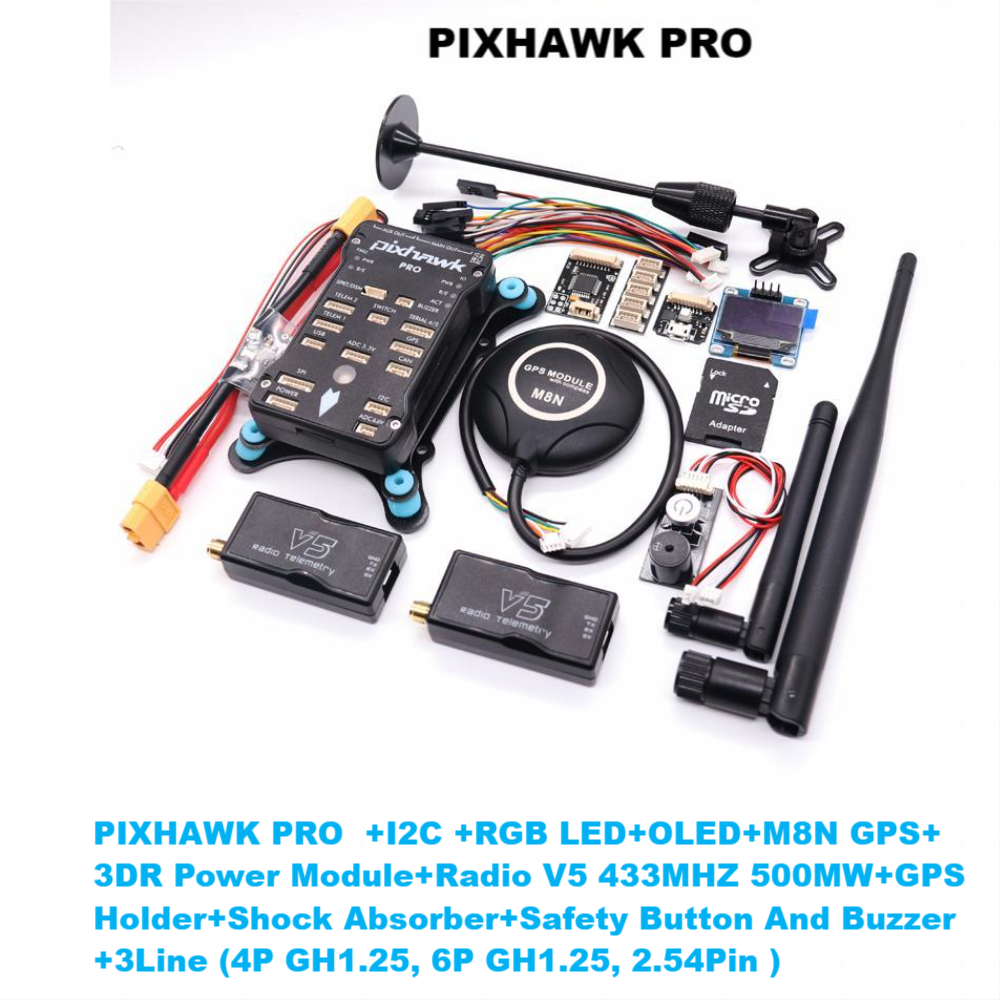
Der Pixhawk unterstützt die neuesten Firmware-Versionen von ArduPilot und PX4, einschließlich 2.4.8 und PRO. Es verfügt über einen dedizierten GH-Anschluss mit Verriegelungsmechanismus für eine stabilere Verbindung und eine TYPE-C-USB-Schnittstelle für zuverlässige Kommunikation.
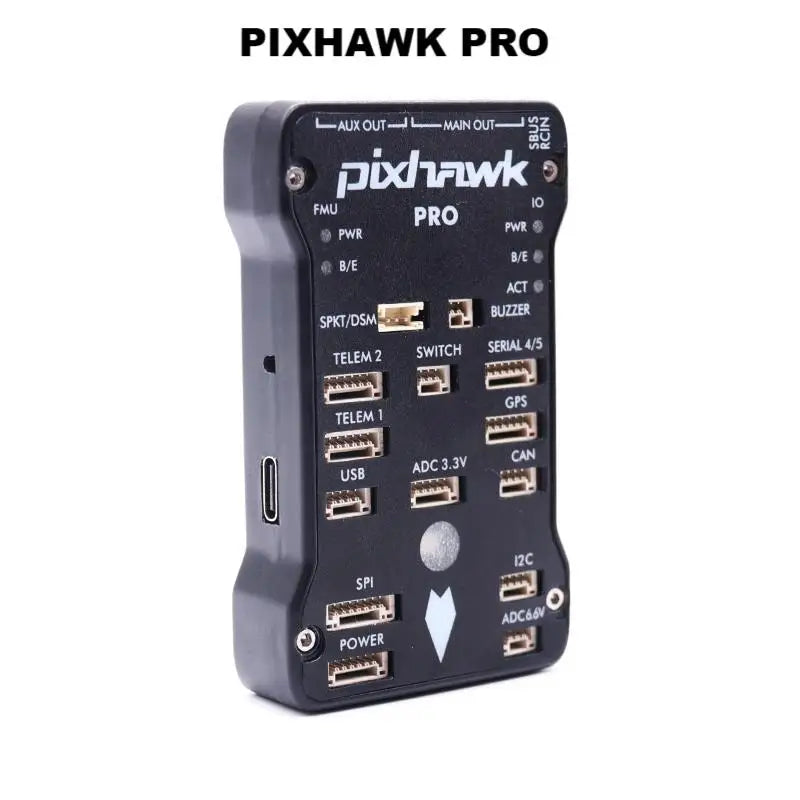



PIXHAWK PRO AUX Out- OUT 32 pixdnuwk FMU PRO PWR FWR BE BTE ACT SPKTDSM BUZZER TELEM Switch Serial4/5 TYPE-C USB TeLEM GPS USB ADC 3 3v CAN SpI 12C POWER AdcG6
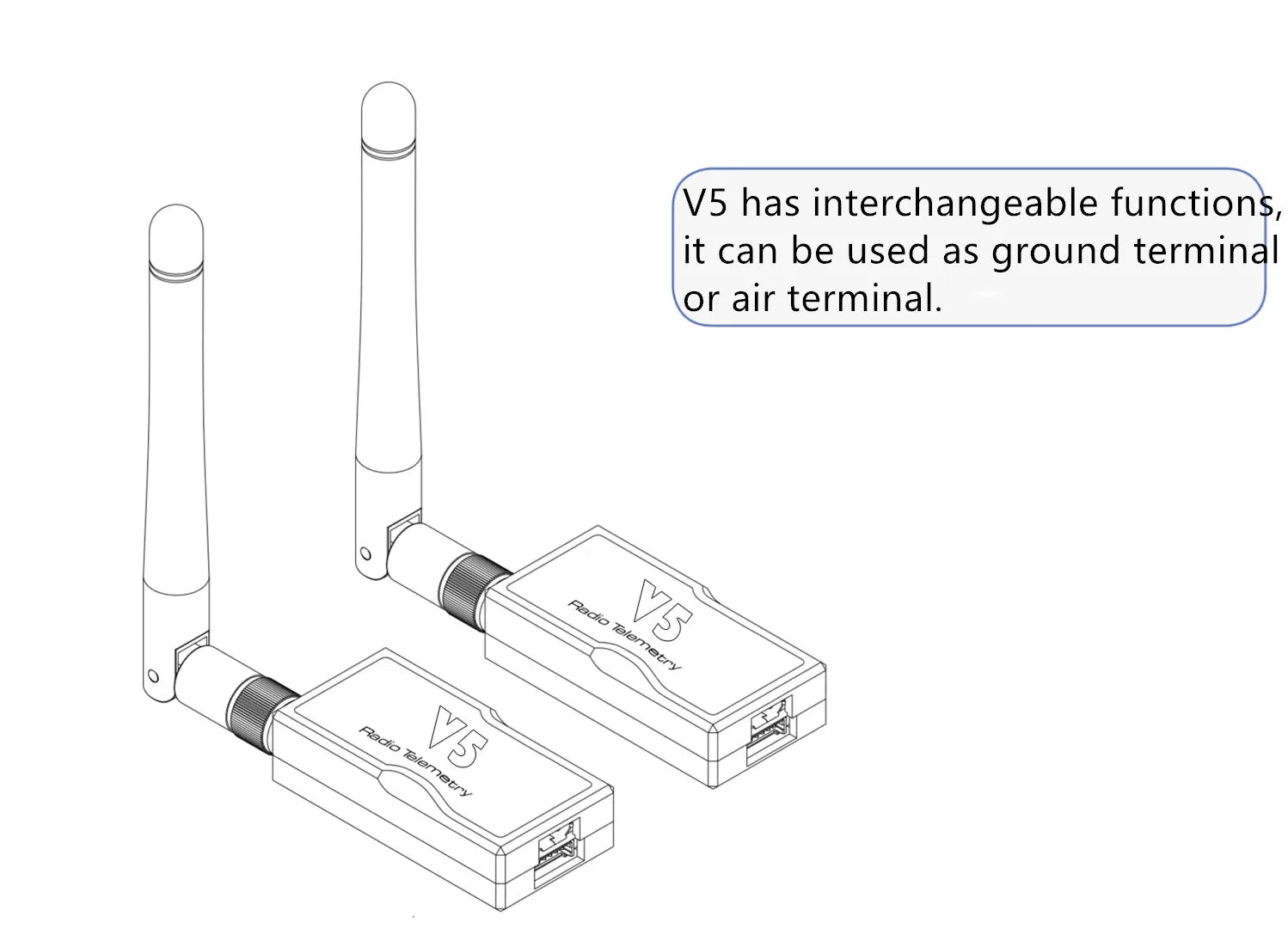
Der Flugcontroller Pixhawk PX4 PRO verfügt über austauschbare Funktionen, sodass er sowohl als Bodenstation als auch als Flugterminal verwendet werden kann.
![[4] [1] [2] [3] Radio Talemet](https://rcdrone.top/cdn/shop/files/H8ea99d00a908494db39129dc6647352a5_2f6b2a1e-638a-4d31-9f81-30e9dc1b04c8.webp?v=1714895618)
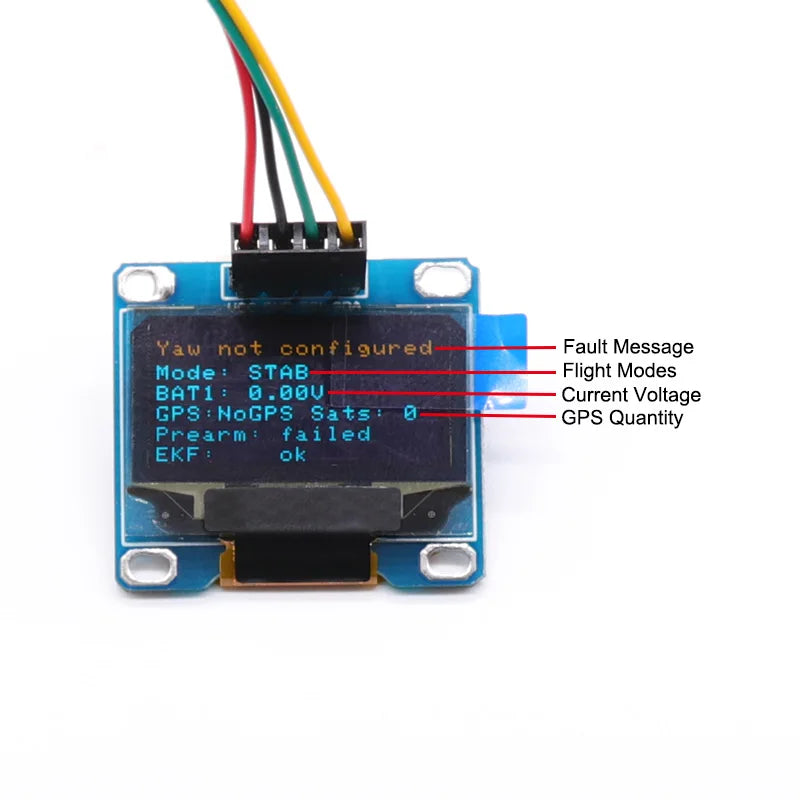
Warnung: Nicht konfiguriert. Fehlermeldungsmodus: Stabile Flugmodi nicht verfügbar. Batteriestand: 0 % (BAT1). Strom: 0,00 uA. Spannung: unbekannt. GPS: Kein GPS-Signal verfügbar. GPS-Menge: unbekannt. Die Voraktivierung ist fehlgeschlagen. EKF nicht initialisiert.
Related Collections