




ROBOTERA XHAND 1 Roboterhand - 12 Freiheitsgrade, 270° taktile Fingerspitzen, 80N Griffkraft, 25 kg Tragkraft, EtherCAT/RS485, ROS-kompatibel
ROBOTERA XHAND 1 Roboterhand - 12 Freiheitsgrade, 270° taktile Fingerspitzen, 80N Griffkraft, 25 kg Tragkraft, EtherCAT/RS485, ROS-kompatibel
ROBOTERA
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
ROBOTERA XHAND 1 ist eine Roboterhand mit fünf Fingern, die über voll direkte Antriebsmodulen und 12 aktiven Freiheitsgraden verfügt. Die Hand hat die Größe einer menschlichen Hand (191 mm x 94 mm x 47 mm) und ist für geschickte Manipulationen mit hochauflösenden taktilen Sensoren, robuster Greifkraft und entwicklerfreundlichen Schnittstellen für die Robotikforschung und -integration konzipiert.
Hauptmerkmale
- Vollständige Direktantriebsarchitektur mit integrierten, gearbeiteten, kraftgesteuerten Gelenkmodulen (3 im Daumen; 9 in den anderen vier Fingern).
- 12 vollständig aktive Freiheitsgrade; seitliche Schwenkbewegung des Zeigefingers von +/-15° für komplexe Manipulationen in der Hand.
- Hohe Greiffähigkeit: Fingertippkraft 15N; maximale Greifkraft 80N; maximales Greifgewicht bis zu 25 Kg (Handfläche nach oben) und 16 Kg (Handfläche nach links).
- Hochgeschwindigkeitsbetätigung mit Unterstützung von >2Hz Öffnen/Schließen Wiederholung; nachgewiesenes Fingerklicken bis zu 10 CPS (Klicks pro Sekunde).
- 270° Fingerspitzen-Tastabdeckung mit fünf dreidimensionalen Tastsensorarrays; Handauflösung 12x10 pro Fingerspitze x 5.
- Dreidimensionale Kraftmessung einschließlich tangentialer Kräfte (X und Y); Wiederholgenauigkeit der Fingerspitze +/-0,20 mm.
- Rückführbar mit Dämpfung <= 0,1 Nm; Stromschleifen-Kraftregelung und Kraft-Positionsregelung für nachgiebige Interaktion.
- Entwicklerfreundliche Konnektivität: EtherCAT und RS485 (USB); kompatibel mit ROS1/ROS2, Ubuntu (Linux), x86- und ARM-Architekturen, TwinCAT und gängigen Roboterarmen (einschließlich xARM, Realman, UR).
- Haltbarkeit bewertet für 1.000.000 Lastlosgreifzyklen; Betriebstemperatur -20°C ~ 60°C.
Für Anfragen, Integrationsunterstützung oder Großbestellungen kontaktieren Sie [email protected] or besuchen Sie https://rcdrone.top/.
Technische Daten
| Parameter | Wert |
|---|---|
| Gewicht | 1100 g |
| Abmessungen (L x B x H) | 191 mm x 94 mm x 47 mm (Die Größe einer Erwachsenenhand) |
| Aktive DoF (Gesamt) | 12 |
| Passive DOF (Gesamt) | 0 |
| DoF-Zuweisung | Daumen x 3; Zeigefinger x 3; Mittelfinger x 2; Ringfinger x 2; Kleiner Finger x 2 |
| Daumenbetätigung/-übertragung | 3 gear-driven force-controlled joint module |
| Vierfingerbetätigung/-übertragung | 9 gear-driven force-controlled joint module |
| Fingerkuppen-Konfiguration | Runde oder abgerundete Fingerkuppen |
| Laterale Schwingung | -15°~+15° (Zeigefinger) |
| Fingertip-Wiederholgenauigkeit der Positionierung | +/− 0.20 mm |
| Steuermodi | Positionsregelung (geringe Dämpfung/hohe Dämpfung), Stromschleifen-Kraftregelung, Kraft-Positionsregelung |
| Fingerkraft | 15N |
| Maximale Greifkraft (ganze Hand) | 80N |
| Maximales Greifgewicht (Handfläche links) | 16 Kg |
| Maximales Greifgewicht (Handfläche nach oben) | 25 Kg |
| Daumen weiteste Opposition | Kleiner Finger |
| Öffnen/Schließen Wiederholgeschwindigkeit | >2Hz |
| Rückführungsdämpfung (rückführbar) | <= 0.1 Nm |
| Taktile Abdeckung | 270° Fünf-Finger-Spitzenumfassung |
| Anzahl der taktilen Sensoren | Fünf 270° dreidimensionale umschließende taktile Array-Sensoren an fünf Fingerspitzen |
| Taktile Auflösung (gesamte Hand) | 12x10 (270° umschließend pro Fingerspitze) x 5 |
| Taktile Sensordimensionen | Dreidimensionale Kraftmessung (einschließlich tangentialer Kräfte X und Y) |
| Gesamte Handsteuerfrequenz | 83Hz |
| Kommunikationsrate | EtherCAT: 100MHz; RS485: 3MHz |
| Sensorparameter | Fingerspitzen: 120 dreidimensionale Profilierungsarray-Kräfte; Gelenke: Position, Geschwindigkeit, Temperatur, Strom (Drehmoment) |
| Steuerparameter | Gelenkposition; Gelenkmoment; Gelenksteifigkeitskoeffizient; Gelenkdämpfungskoeffizient |
| Lastfreie Greifzyklen | 1.000.000 Zyklen |
| Betriebstemperaturbereich | -20°C ~ 60°C |
| Arbeitsspannung | 24V ~ 72V |
| Stromaufnahme im Leerlauf | 0.15A @48V, 7W |
| Maximaler Strom | 2.5A @48V, 120W |
| Kommunikationsschnittstelle | RS485 (USB), EtherCAT |
Anwendungen
- Teleoperation: unterstützt MR- und Handschuh-Teleoperation; Vision Pro Teleoperation; Manus Handschuhe; Pico/Meta Quest.
- Integration von Roboterarm und Humanoiden: kompatibel mit xARM, Realman, UR und anderen Roboterarmen.
- Forschung und Simulation: präzise URDF, taktile Sensierungssimulation; geeignet für Reinforcement Learning mit Isaac Gym und Mujoco.
- Mensch-Maschine-Interaktion und Bedienung menschlicher Werkzeuge mit nachgiebiger Kraftkontrolle.
Handbücher
Xhand_adapter.stp
MH2.25_rechts_stp.zip
MH2.25_links_stp.zip
XHand_Control_ROS_Documentation.pdf
X-Hand_1_Produktanleitung_1.0.pdf
X-Hand_1_Benutzer_Schnellstartanleitung_1.0.pdf
Details

ROBOTERA XHAND1 Roboterhand mit vollem Direktantrieb, die wahre Freiheit und fortschrittliche Geschicklichkeit bietet.

XHAND1 von ROBOTERA: humanoide Hand mit fünf Fingern, 12 Freiheitsgraden, 270° taktilen Sensoren pro Fingerspitze, 80N Greifkraft, 25kg Tragfähigkeit. Entwickelt für komplexe Aufgaben und Werkzeughandhabung.

XHAND 1: Erste geschickte Hand mit Direktantriebsmodulen pro Gelenk. Verfügt über leistungsstarke kabellose Motoren, niederdämpfende Reduzierer, Präzisionsencoder und selbstentwickelte integrierte Gelenkmodule für fortschrittliche robotische Manipulation.
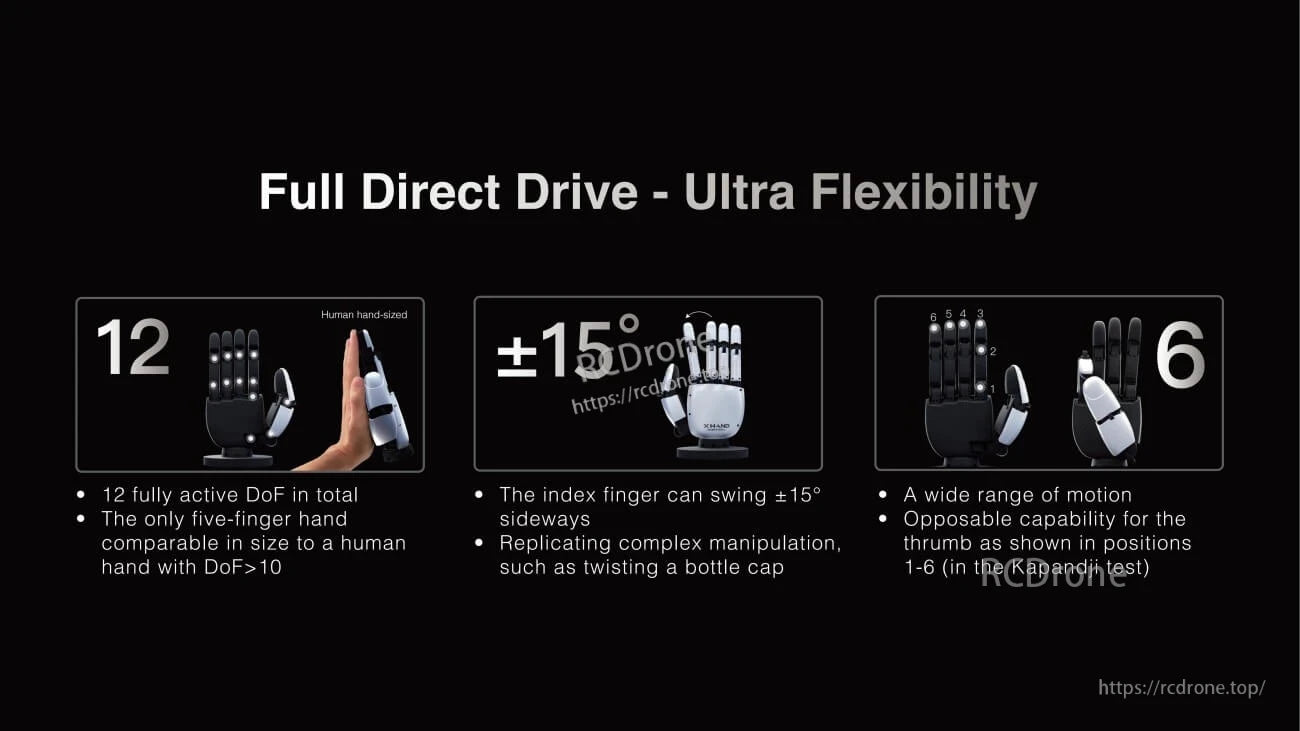
ROBOTERA XHAND 1 ist eine ultra-flexible, menschlich große Roboterhand mit 12 aktiven Freiheitsgraden. Ihr Zeigefinger schwingt ±15° seitlich für komplexe Aufgaben, und der Daumen bietet sechs opponierbare Positionen für vielseitige Manipulation.

ROBOTERA XHAND 1: 25 kg Tragfähigkeit, 80 N Greifkraft, vollständiger Direktantrieb, übertrifft ähnliche Lösungen mit Verbindungen/Sehnen.

Der Full Direct Drive Roboterhand erreicht 10 CPS mit geschwindigkeitsgesteuertem Antrieb, Drehmoment über 1 Nm und übertrifft Verbindungs- und Sehnensysteme für überlegene Gaming-Leistung.

ROBOTERA XHAND 1 verfügt über 270° Fingerspitzen-Sensoren mit >100 Punkten und 0,05 N Genauigkeit für 3D-Kraft-, taktile und Temperatursensorik, die eine überlegene Greifleistung gewährleisten.
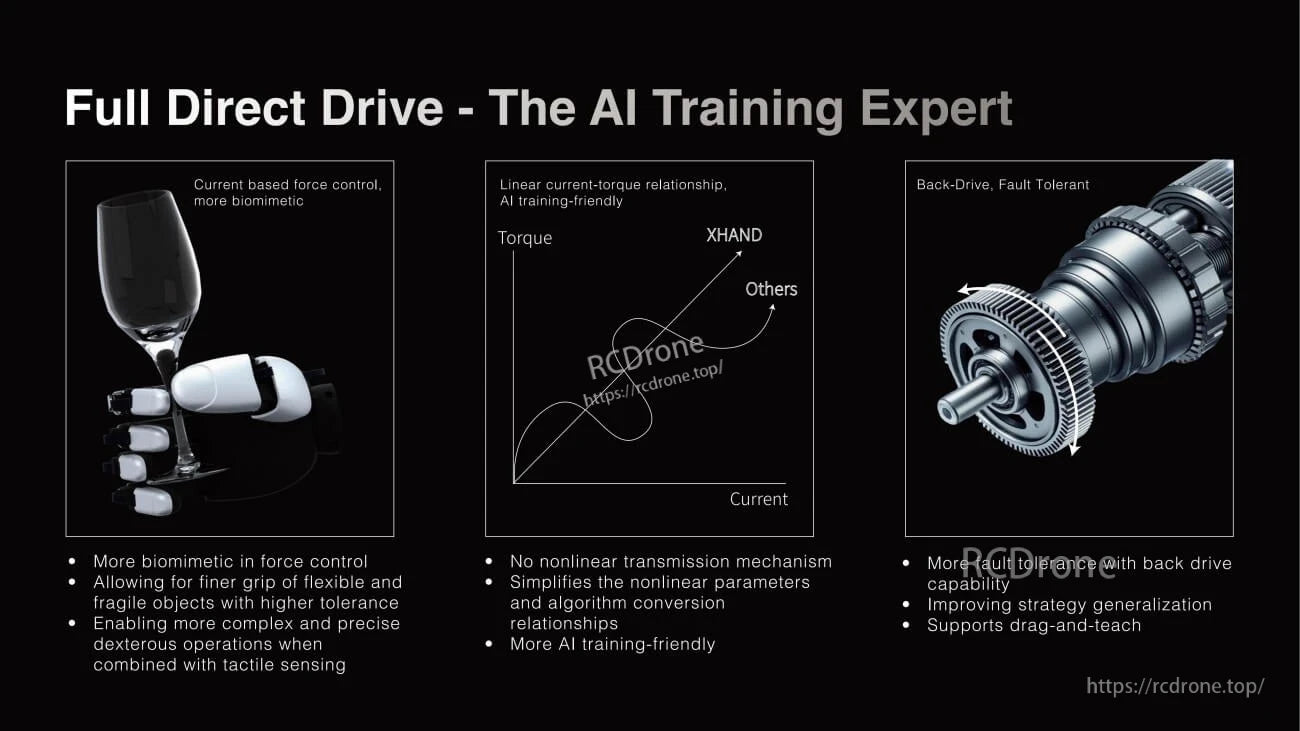
ROBOTERA XHAND 1 bietet biomimetische Kraftkontrolle, lineare Drehmoment-Strom-Antwort für KI-Training und Rücklauf-Fehlertoleranz – ermöglicht präzises Handling, vereinfachte Algorithmen, Drag-and-Teach-Unterstützung und verbesserte Strategie-Generalisierung.
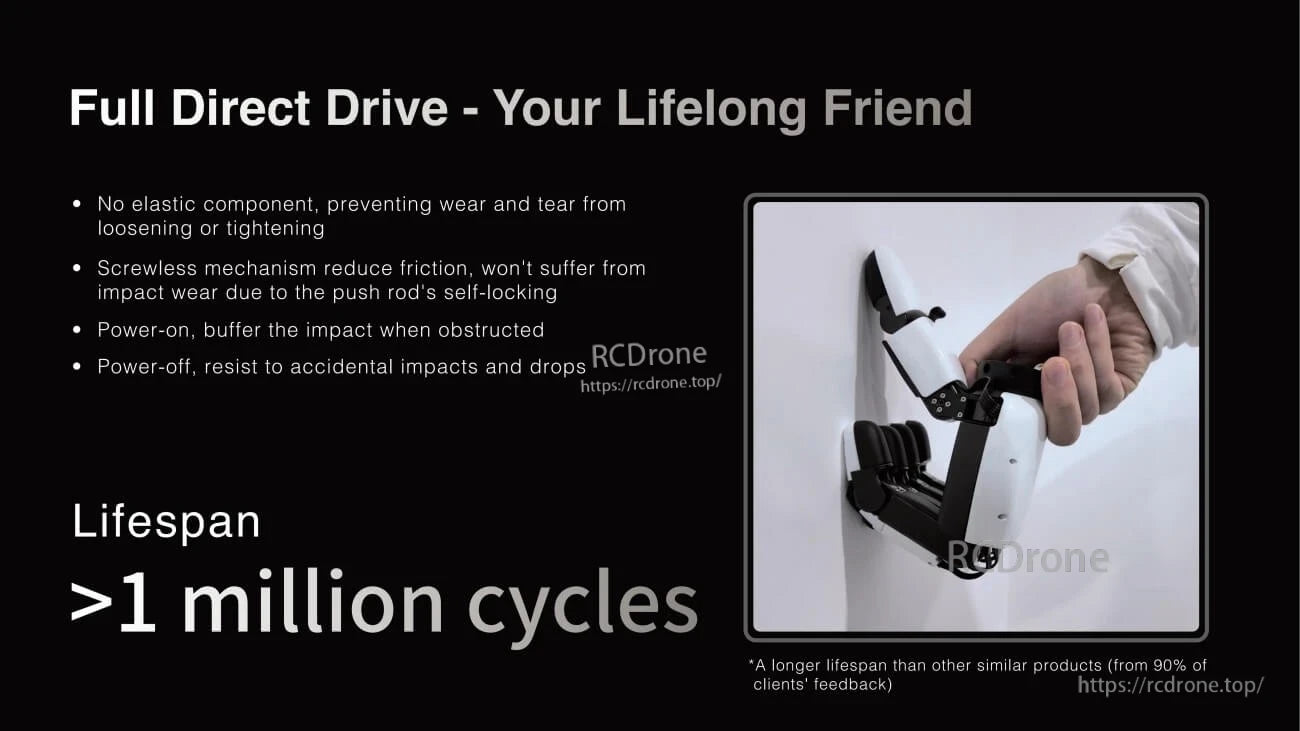
Der vollwertige Direktantrieb-Roboterhand bietet Langlebigkeit ohne elastische Teile oder Schrauben, Stoßdämpfung im eingeschalteten Zustand, Sturzsicherheit im ausgeschalteten Zustand und eine Lebensdauer von über einer Million Zyklen – übertrifft ähnliche Produkte laut Kundenfeedback.

ROBOTERA XHAND 1 unterstützt MR- und Handschuh-Teleoperation, kompatibel mit ROS1/ROS2 und Ubuntu auf x64/ARM. Verfügt über EtherCAT/TwinCAT/RS485 zur Integration mit xARM, Realman, UR-Roboterarmen. Bietet präzises URDF-Modellieren und taktile Sensierungssimulation. Entwickelt für entwicklerfreundliche Robotikanwendungen mit plattformübergreifender Flexibilität und fortschrittlichen Steuerprotokollen.
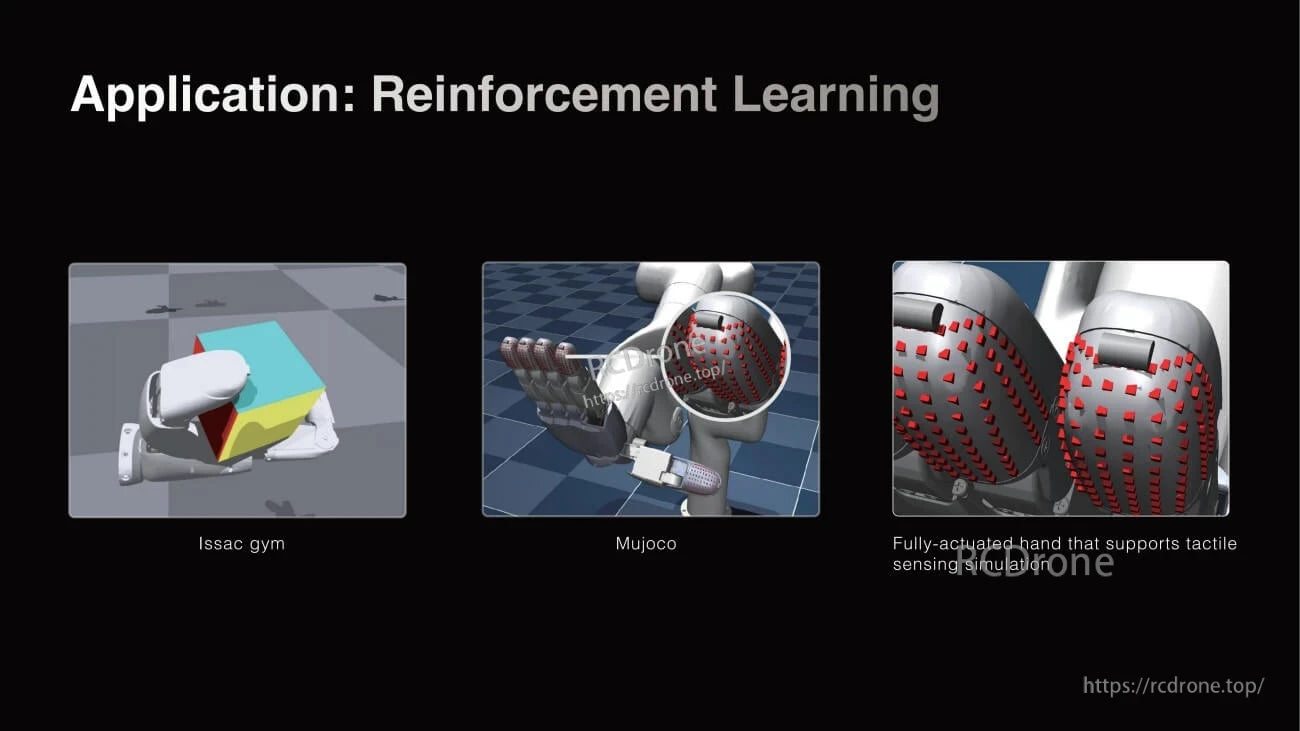
Anwendungen des verstärkenden Lernens: Issac Gym, Mujoco und vollaktuiertes Hand mit taktiler Sensierungssimulation für fortschrittliche robotische Steuerung und Trainingsumgebungen.
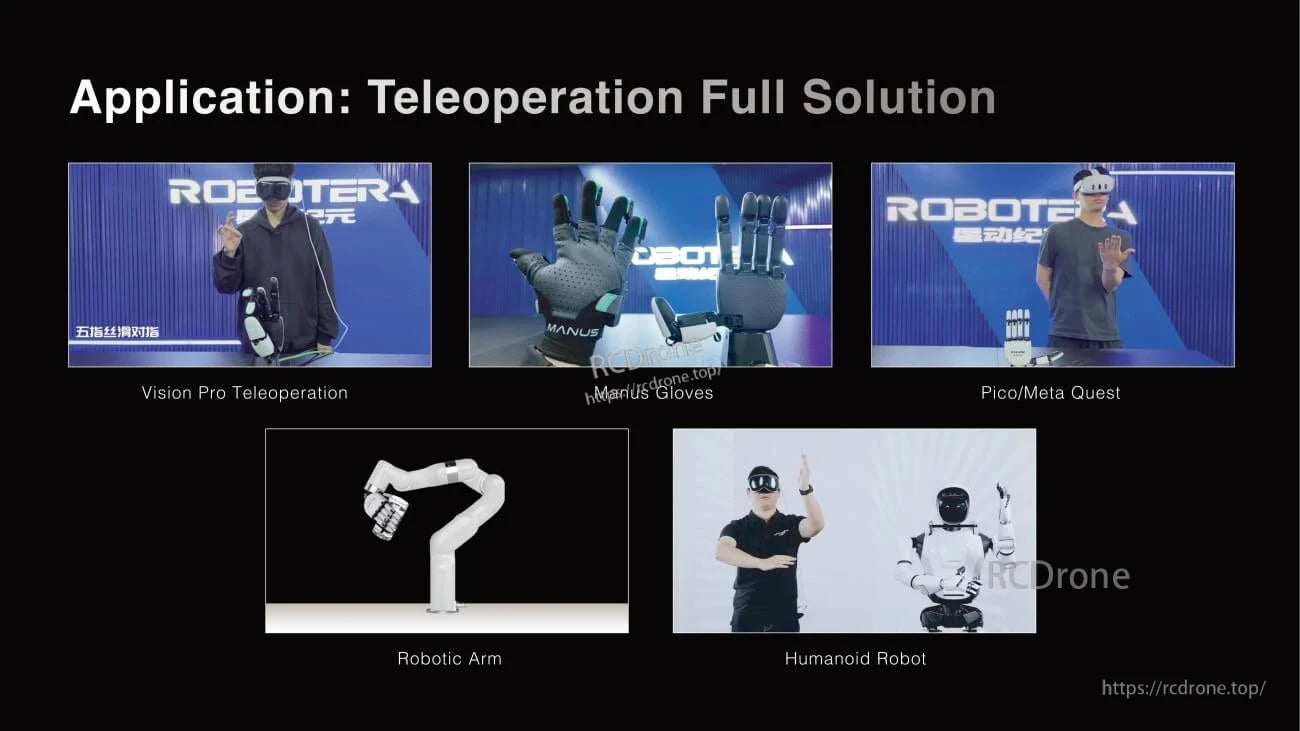
Teleoperationslösung mit Vision Pro, Manus Handschuhen, Pico/Meta Quest, Roboterarm und humanoidem Roboter für fortgeschrittene Fernsteuerung.
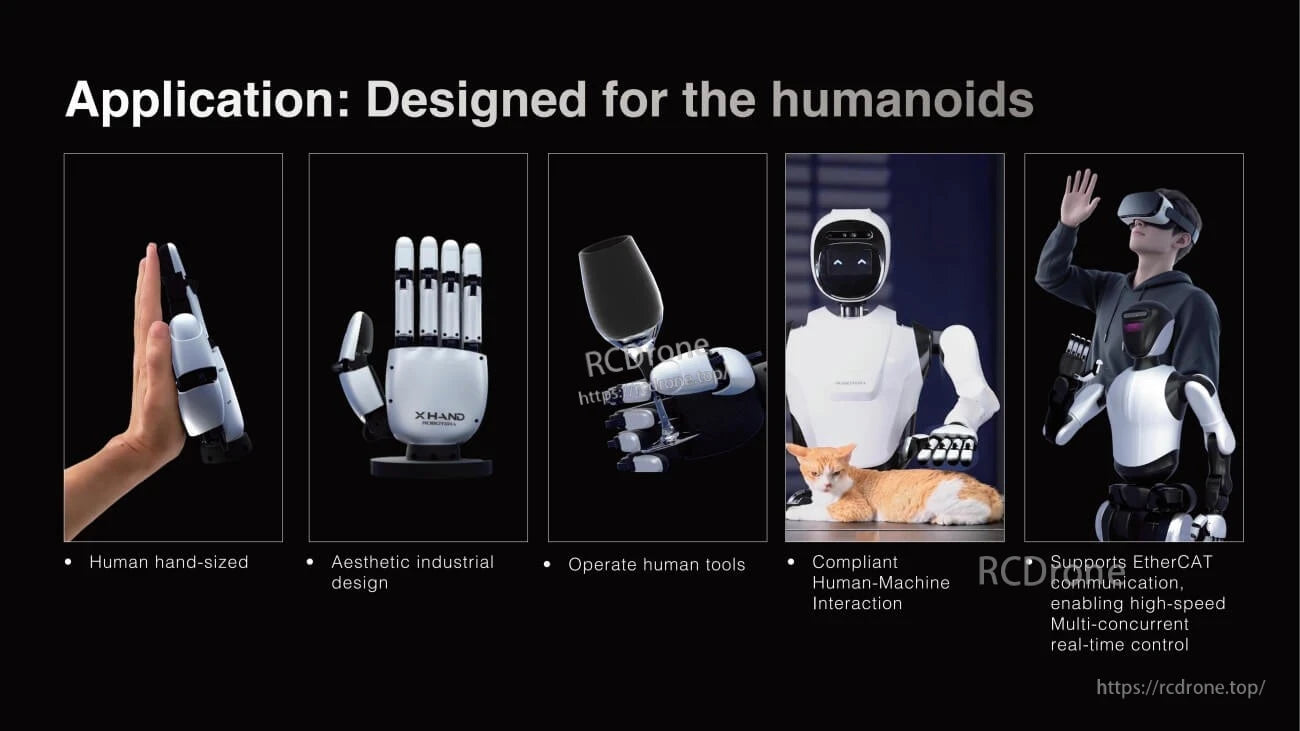
Menschgroße Roboterhand mit ästhetischem Design, bedient Werkzeuge, ermöglicht konforme Interaktion, unterstützt EtherCAT für die Echtzeitsteuerung.
Related Collections




