



Programmierbare Drohne S2-F290 – Pixwawk Open Source ROS SLAM AI Sekundärentwicklung auf industrieller Ebene für Drone Challenge
Programmierbare Drohne S2-F290 – Pixwawk Open Source ROS SLAM AI Sekundärentwicklung auf industrieller Ebene für Drone Challenge
RCDrone
Verfügbarkeit für Abholungen konnte nicht geladen werden
Überblick
Der S2-F290 Programmierbare Drohne ist ein Hochleistungs Industrie-Drohne Entwickelt für sekundäre Entwicklung und Drohnen-Herausforderungen. Mit einem Nutzlastkapazität von 2400g, A 6S 6000mAh Akkuund ein maximale Kontrollentfernung von 10 kmliefert es Präzision mit GPS-Positionierungsgenauigkeit von ≈1–2 m Und Windwiderstandsklasse 3–4. Angetrieben durch die Pixhawk 2.4.8 Flugsteuerung mit Open-Source-ROS-SLAM-TechnologieDie Drohne unterstützt erweiterte Funktionen wie 3D-LiDAR-Mapping, YOLO-basierte Objekterkennung und Formationsflug. Es ist 3mm Kohlefaserrahmen sorgt für außergewöhnliche Haltbarkeit und Stabilität, getestet unter extremen Bedingungen. Die Plattform ist hochgradig anpassbar und bietet Funktionen wie Unterstützung für chinesische/englische QGC-Bodenstationen, modulare Erweiterbarkeit und umfassende Tutorials, was sie ideal für Forschungs-, Wettbewerbs- und Entwicklungsanwendungen macht.
Spezifikation
Flugzeug
| Parameter | Spezifikation |
|---|---|
| Name | S2-F290 Programmierbare Drohne |
| Nutzlastgewicht | Schweinefleisch-Schinken ca. 2400g |
| Modell | S2-F290 |
| Genauigkeit der GPS-Positionierung | ≈1–2 m |
| Radstand | 290 mm |
| Maximales Startgewicht | Schweinefleisch-Schinken ca. 3190 g |
| Batterie | 6S Standard 6000mAh Akku |
| Kontrolldistanz | 10 km (empfohlen innerhalb von 1000 m) |
| Windbeständigkeit | Stufe 3–4 |
| Betriebsumgebung | Innen/Außen |
| Ergebnisse des Dauertests | Details |
|---|---|
| Propeller | 7 Zoll |
| Batteriekapazität | 6S 6000 mAh (5300 mAh verwendet) |
| Umfeld | Windstill |
| Flugdauer | 11 Minuten 30 Sekunden |
Fluglotse
| Komponente | Spezifikation |
|---|---|
| FMU-Prozessor | STM32H743 Cortex-M7, 480 MHz, 2 MB Flash, 1 MB SRAM |
| IO-Prozessor | STM32F103 Cortex-M3, 72 MHz, 64 KB SRAM |
| Sensoren | Beschleunigungsmesser/Gyroskop: ICM-42688-P |
| Beschleunigungsmesser/Gyroskop: BMI055 | |
| Magnetometer: IST8310 | |
| Barometer: MS5611 | |
| Nennspannung | Max. Eingangsspannung: 6 V |
| USB-Stromeingang: 4,75–5,25 V | |
| Servoeingang: 0-36 V | |
| Nennstrom | Telemetrie 1 Max. Ausgangsstrom: 1A |
| Kombinierter Strom für andere Ports: 1 A | |
| Mechanische Daten | Abmessungen: 53,3 × 39 × 16,2 mm |
| Gewicht: 39.2 g | |
| Häfen | - 14 PWM-Ausgänge (8 von IO, 6 von FMU) |
| 2 serielle Allzweckanschlüsse | |
| 2 GPS-Anschlüsse | |
| 1 I2C-Anschluss | |
| 2 CAN-Anschlüsse | |
| - RC-Eingang für Spektrum/DSM, S.BUS, CPPM usw. | |
| Stromeingangsanschluss | |
| Andere Eigenschaften | Betriebstemperatur: -40–85°C |
Bordcomputer
| Komponente | Spezifikation |
|---|---|
| Rechenleistung | 40 TOPS |
| Grafikkarte | 32 Tensor-Kerne mit 1024-Kern NVIDIA Ampere GPU |
| CPU | 6-Kern Arm Cortex-A78AE v8.2 64-Bit, 1,5 GHz |
| RAM | 8 GB, 128 Bit, LPDDR5, 68 GB/s |
| Lagerung | SD-Karte oder externes NVMe |
| Maximale CPU-Frequenz | 1,5 GHz |
Fernbedienung
| Komponente | Spezifikation |
|---|---|
| Betriebsspannung | 4,2 V |
| Betriebsstrom | 100 mA |
| Frequenzband | 2,4 bis 2,483 GHz |
| Gewicht | 525 g |
| Maße | 130 × 150 × 20 mm |
| Akkulaufzeit | 20 Stunden |
| Ladeanschluss | MICRO-USB |
| Regelbereich | 7 km |
GPS
| Komponente | Spezifikation |
|---|---|
| Satellitenempfänger | UBLOX-M9, 92 Kanäle |
| Elektronischer Kompass | QMC5883L |
| Satellitensysteme | GPS L1 C/A, GLONASS L1OF, BeiDou B1, Galileo E1 |
| Satellitenkanäle | 32 |
| Aktualisierungsrate | 25 Hz |
| Positionierungsgenauigkeit | 1,5 Mio. CEP (ideale Umgebung) |
| Startzeit | Kaltstart: 24 s, Heißstart: 1 s |
| Maße | 25 × 25 × 8 mm |
| Gewicht | 12 g |
Batterie
| Komponente | Spezifikation |
|---|---|
| Steckertyp | XT60 |
| Empfohlener Ladestrom | 3–5A |
| Batteriekapazität | Akku mit 6000 mAh |
| Nennspannung | 22.2V |
| Entladerate | 75 °C |
| Maße | 50 × 44 × 158 mm |
| Gewicht | 816 g |
LiDAR
| Komponente | Spezifikation |
|---|---|
| Laserwellenlänge | 905 nm |
| Reichweite | 40 m bei 10 % Reflektivität, 70 m bei 80 % Reflektivität |
| Minimaler Erfassungsbereich | 0,1 m |
| Sichtfeld | Horizontal: 360°, Vertikal: -7° bis 52° |
| Punktwolkenausgabe | 200.000 Punkte/Sekunde |
| Punkterate | 10 Hz |
| Schutzstufe | IP67 |
| Leistung | 6,5 W (25 °C Umgebung) |
| Spannungsbereich | 9–27 V Gleichstrom |
| Maße | 65 × 65 × 60 mm |
| Gewicht | Ca. 265g |
Tiefenkamera
| Komponente | Spezifikation |
|---|---|
| Tiefentechnologie | Duales Infrarot |
| Tiefe Betrachtungswinkel | 87° × 58° (Horizontal × Vertikal) |
| Tiefenauflösung | 1280 × 720 |
| Tiefengenauigkeit | <2 % innerhalb von 2 m |
| Tiefe Bildfrequenz | 90 Bilder/s |
| Tiefenbereich | 0,3–3 m |
| Maße | 90 × 25 × 25 mm |
| Betriebsumgebung | Innen/Außen |
Kamera mit Einzelobjektiv
| Komponente | Spezifikation |
|---|---|
| Max. Auflösung | 2 Megapixel (1920 × 1080) |
| Maximale Bildfrequenz | 30 Bilder/s |
| Sichtfeld | ~90° |
| Kabellänge | ~1.5 m |
| Maße | 35 × 35 × 30 mm |
Funktionstabelle
| Salbung | Grundkonfiguration | Optionales D435 | Optionales D435 + 4G-Modul |
|---|---|---|---|
| Höhe halten, schweben, zurück nach Hause | ✔ | ✔ | ✔ |
| Landung, Stabilisierung, Wegpunktflug | ✔ | ✔ | ✔ |
| Ferngesteuerter Flug | ✔ | ✔ | ✔ |
| Kommunikation zwischen Flugregler und Bordcomputer | ✔ | ✔ | ✔ |
| QR-Code-Erkennung und Landung | ✔ | ✔ | ✔ |
| Objekterkennung und -ablage | ✔ | ✔ | ✔ |
| Gleichzeitige Kartierung und Hindernisvermeidung | ✔ | ✔ | ✔ |
| 3D-LiDAR-Kartierung und -Positionierung | ✔ | ✔ | ✔ |
| YOLO-basierte Objekterkennung | ✘ | ✔ | ✔ |
| Objekterkennung und -verfolgung | ✘ | ✔ | ✔ |
| 4G-Fernbedienung | ✘ | ✘ | ✔ |
Paket beinhaltet
Grundkonfiguration
- Rahmen: F290 Carbonfaserrahmen
- Motoren: 4× T-Motor F100 Kv1100
- ESC: 4× FlyFun T-Rex 5 45A
- Propeller: 4× 7-Zoll-Dreiblatt-Propeller
- Fluglotse: Pixhawk6mini
- Batterie: 6S Standardbatterie 6000mAh
- Ladegerät: 6S Akkuladegerät
- Bordcomputer: Jetson Orin Nano 8G + WIFI-Modul
- SSD: 256G
- LiDAR: Livox MID360
- Kamera: 150° Weitwinkel USB-Kamera
- Fernbedienung: Cloud T10 (inkl. Datenempfänger)
Optionale Konfiguration: D435
Beinhaltet alle Komponenten aus dem Grundkonfiguration, und außerdem:
- Kamera mit DoppelobjektivModell: D435
Optionale Konfiguration: D435 + 4G-Modul
Beinhaltet alle Komponenten aus dem Basic Konfiguration, und außerdem:
- Kamera mit DoppelobjektivModell: D435
- 4G Modul
Details
S2-F290 Programmierbare Drohne
- ✔ Technischer Support, unkomplizierter Kundendienst
- ✔ Bietet Wettbewerbsbeispiele, anpassbar
- ✔ Chinesisch/Englisch Mobile Bodenstation
- ✔ Hohe Stabilität, hohe Leistung
- ✔ Innen/Außen
Die S2-F290 ist eine hochmoderne Drohne, die speziell für Drohnenrennen entwickelt wurde und auf Erkundung und Innovation spezialisiert ist.Es wurde mit dem Ziel entwickelt, fortschrittliche Technologie und unbegrenzte Kreativität zu integrieren und kann sich an verschiedene komplexe Umgebungen anpassen, wodurch die Erkundung aus der Luft zugänglicher und effektiver wird.
Diese Drohne zeichnet sich durch ein kompaktes Design und enorme Leistung aus. Sie bietet eine Fülle von Wettbewerbsbeispielen, sodass Benutzer ihre Leistung schnell beherrschen und optimieren können. Ausgestattet mit einer speziellen mobilen Bodenstation in Chinesisch/Englisch verbessert sie den Bedienkomfort der Drohne erheblich. Darüber hinaus bietet sie wettbewerbsfähige Quellcode-Erklärungen und Anpassungsmöglichkeiten, um sicherzustellen, dass Benutzer ihre gewünschten Funktionen in kürzester Zeit erreichen und gleichzeitig in Wettbewerbsszenarien glänzen können.

Den Bedarf an Entwicklung / Wettbewerb / Forschung decken
| Kategorie | Details |
|---|---|
| ROS-Grundkenntnisse | Fernbedienung |
| - Kommunikation zwischen Flugregler und Bordcomputer | |
| Grundfunktionen | - Routenplanung |
| - QR-Code-Erkennung und -Positionierung | |
| - Autonome Patrouille außerhalb des Fahrzeugs | |
| Erweiterte Funktionen | - QR-Code-Erkennung für die Landung |
| - Objekterkennung und Ablegen | |
| - Gleichzeitige Kartierung und Hindernisvermeidung | |
| - 3D-LiDAR-Mapping und -Positionierung | |
| - YOLO-basierte Objekterkennung | |
| - Webbasierte Videoübertragung | |
| - Formationsfliegen im Freien | |
| - Land-Luft-Kollaborationsformation | |
| Optionale D435-Kamerafunktionen | - VINS Visuelle Positionierung |
| - YOLO-basierte Objekterkennung und -verfolgung | |
| Optionale 4G-Kommunikationsfunktionen | 4G-Fernbedienung |
Autonome Hindernisvermeidung, umfassende Sicherheitsgarantie
Mithilfe von 3D-LiDAR zur autonomen Hindernisvermeidung kombiniert die Drohne globale Routenplanung mit lokaler dynamischer Hindernisvermeidung, um Hindernisse aus allen Richtungen präzise zu erkennen. Sie unterstützt sowohl automatisches Anhalten als auch kontinuierlichen Flug und ermöglicht so die flexible Vermeidung von Objekten entlang der Flugroute, was ein sichereres Flugerlebnis gewährleistet.

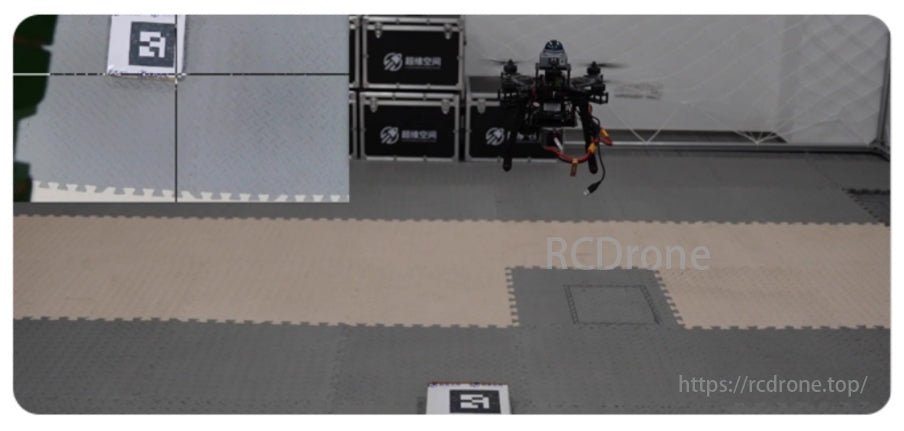
QR-Code-Erkennung und Landung
Die Drohne aktiviert die Kamera und das QR-Code-Erkennungsmodul, um die Positionsdaten des QR-Codes in Echtzeit zu erfassen. Während des Abstiegs passt die Drohne ihre Position dynamisch an und sorgt so für eine präzise Ausrichtung auf das Sichtfeld der Kamera, bevor sie zur Landung übergeht.
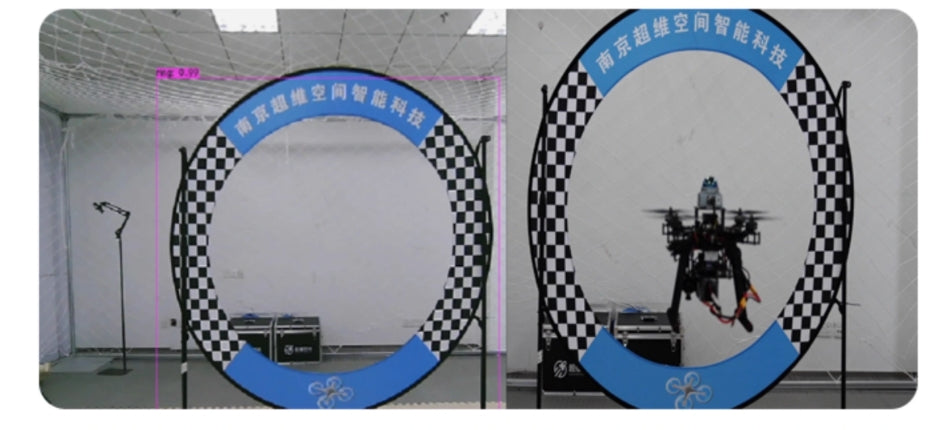
YOLO-Objekterkennung
Die Drohne nutzt YOLOv8 zur Objekterkennung und erfasst die Positionsinformationen des kreisförmigen Rahmens in Echtzeit. Sie passt ihre Position autonom an und navigiert durch den kreisförmigen Rahmen.
Formationsfliegen im Freien
Die Drohne nutzt Schwarmformationstechnologie, die eine koordinierte Steuerung mehrerer Drohnen ermöglicht, um einen Formationsflug zu erreichen.Durch den Einsatz moderner Kommunikations- und kollaborativer Steuerungsalgorithmen erleichtert es die Echtzeitkommunikation und den Informationsaustausch zwischen Drohnen und synchronisiert ihre Bewegungen und Positionen, um eine dichte Formation zu bilden.

Land-Luft-Kollaboration
Diese Plattform unterstützt die kollaborative Formation zwischen Land- und Luftdrohnen. Durch die Nutzung eines lokalen Netzwerks mit Topologiestrukturen für die Gerätekonnektivität nutzt sie UDP-Kommunikation und benutzerdefinierte Protokolle, um eine schnelle und stabile Kommunikation zu gewährleisten. Mit der PID-Steuerung erreicht sie eine synchronisierte Verfolgung zwischen der Hauptdrohne und mehreren Slave-Drohnen und gewährleistet so Formationsstabilität und Betriebseffizienz.

Wettbewerbsbeispiel
Bietet exklusive Wettkampfszenarien mit Schritt-für-Schritt-Anleitung, sodass sich die Teilnehmer problemlos an verschiedene Wettkampfarten anpassen können.



Merkmale der programmierbaren Drohne S2-F290
Hohes Preis-Leistungs-Verhältnis
- Entwickelt für Anfänger, um die Lernkurve zu verkürzen und die Drohnenbedienung leichter zu meistern.
- Der erschwingliche Preis macht sie zur idealen Lerndrohne für Schüler und Enthusiasten.
Hohe Stabilität
- Drei Jahre lang unter verschiedenen Extrembedingungen getestet.
- Ausgestattet mit einem 3 mm dicken Kohlefaserrahmen für verbesserte Haltbarkeit und Stabilität.
- Ermöglicht Benutzern, bei ihrer ersten Wettkampferfahrung Anerkennung zu gewinnen.
Erweiterbarkeit
- Unterstützt erweiterte Anpassung für verschiedene Anwendungen.
- Kompatibel mit verschiedenen Erweiterungskomponenten, um die Leistung und Funktionalität der Drohne kontinuierlich zu verbessern.
Sorgenfreier Kundendienst
- Professionelles Team für umfassende Beratung und Betreuung.
- Bietet kostenlose Reparaturen für Hardwareschäden, die durch Bedienungsfehler während der Garantiezeit verursacht wurden (ausgenommen Zubehör und Batterien).
Anpassbar
- Bietet Unterstützung für die exklusive Entwicklung in ROS und QGC.
- Unterstützt eine hohe Genauigkeit von über 98 % für Kartierung und Navigation.
- Kompatibel mit RTK/GPS-Modulen, Logos und verschiedenen einzigartigen Funktionen.

Konfiguration der Bodenstation
Verwenden des Pixhawk 2.4.8-Flugcontrollers
Ausgestattet mit dem neuesten 32-Bit-Standardprozessor STM32F427 und dem Barometer MS5611 bietet dieser Flugcontroller als Open-Source-Option zahlreiche Schnittstellen und ein gutes Preis-Leistungs-Verhältnis.
1. Exklusive, stark angepasste QGC-Bodenstation
- Erreicht über 98 % Lokalisierung ins Chinesische.
- Unterstützt erweiterte Funktionen wie NTRIP.
2. Mobile QGC-Bodenstation
- Bietet eine mobile Version der QGC-Bodenstation und ermöglicht so eine nahtlose Bedienung von einem Smartphone aus.
3. Wi-Fi- oder 4G-Direktverbindung
- Zur Bedienung per Smartphone oder Computer ist eine einfache WLAN-Verbindung erforderlich.
- Notiz: Das „ezuav“-System zeigt eine Verbindung zum Gerät an, kann aber keinen Internetzugang bereitstellen.

Umfassende Tutorials und vollständig Open-Source-Ressourcen
- Äußerst detaillierte Nutzungs-Tutorials, die alle Aspekte der Funktionalität der Drohne S2-F290 abdecken.
- Vollständig Open-Source-Materialien, darunter:
- Softwareeinführungen und Installationsanleitungen.
- Tutorials für grundlegende und erweiterte Funktionen, wie etwa OpenCV-basierte Objekterkennung, 3D-Mapping und autonomes Fliegen außerhalb des Flugzeugs.
- Benutzerdefinierte Entwicklungsanweisungen für die PX4- und MAVLink-Kommunikation.
- Häufig gestellte Fragen zur Fehlerbehebung, Konfiguration der ROS-Umgebung und Betriebsschritte.
Related Collections


