









SteadyWin GIM3510-8 kleines Roboter-Gelenkmodul, 8:1 Planetengetriebe, CAN-Treiber, Doppel-Encoder, 24V 60W
SteadyWin GIM3510-8 kleines Roboter-Gelenkmodul, 8:1 Planetengetriebe, CAN-Treiber, Doppel-Encoder, 24V 60W
SteadyWin
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Das SteadyWin GIM3510-8 kleine Roboter-Gelenkmodul ist ein integrierter Roboter-Gelenkantrieb, der einen Aloha-Motor, einen 8:1 Planetengetriebe-Reduzierer, einen integrierten Kommunikations-Treiber und doppelte Encoder in einem kompakten zylindrischen Gehäuse kombiniert. Mit einer Nennspannung von 24 V (breiter Bereich von 12–40 V oder 12–48 V je nach Treiberplatine), einer hohen Ausgangsgeschwindigkeit von bis zu 564,6 U/min nach der Reduzierung und CAN-Bus-Kommunikation ist es für agile humanoide Roboter, Roboterarme, mobile Plattformen und andere Mehrachsen-Systeme konzipiert, die eine präzise, geschlossene Regelung der Bewegungssteuerung erfordern.
Hauptmerkmale
- Hochgeschwindigkeits-Planetenreduzierung: 8:1 Planetengetriebe mit einer Nenn-Ausgangsgeschwindigkeit von 535,5 U/min und maximal 564,6 U/min (GDZ34), geeignet für schnell bewegliche Gelenke.
- Breiter Spannungsbereich: Nennbetrieb mit 24 V und einem Eingangsbereich von 12–40 V (GDZ34) oder 12–48 V (GDS34) für flexibles Systemdesign der Stromversorgung.
- Effiziente Drehmomentabgabe: Drehmomentkonstante bis zu 0,32 N.m/A mit Nennmoment bis zu 1,68 N.m und Spitzenmoment bis zu 6,02 N.m, was eine effiziente Energieübertragung für leichte bis mittelschwere Robotergelenke ermöglicht.
- Integrierter Treiber mit CAN-Bus: Eingebautes Treiberboard (GDS34 oder GDZ34) unterstützt die CAN-Kommunikation für vereinfachte Verkabelung und vernetzte Steuerung.
- Duale Encoder-Rückmeldung: 14-Bit-Encoder am Treiber und ein zweiter Encoder an der Ausgangswelle für genaue Positions- und Geschwindigkeitsrückmeldung.
- Kompakte Bauweise: Nur 46 mm Außendurchmesser mit einer Gesamtlänge von 46,5 mm (ohne Treiber) bis 51,5 mm (mit Treiber), was dichte Mehrgelenk-Layouts ermöglicht.
- Umweltbeständigkeit: IP54 Schutzart, Betriebstemperatur von -20°C bis +80°C und Geräuschpegel unter 60 dB.
- Schutzfunktionen: Übertemperatur-, Überspannungs- und Überlastschutz helfen, einen sicheren und zuverlässigen Betrieb in kontinuierlich betriebenen Robotersystemen aufrechtzuerhalten.
- Mechanische Robustheit: Unterstützt bis zu 75 N axiale Last und 300 N radiale Last auf der Ausgangswelle, mit einem Rücklauf des Reduzierers von 15 Bogenminuten.
- Benutzerdefinierte Bremsoption: Unterstützt die Integration benutzerdefinierter Bremsen für Gelenke, die ein Haltemoment im unpowered Zustand benötigen.
Für technische Unterstützung, Anpassungen oder Integrationsfragen zum GIM3510-8 kleinen Roboter-Gelenkmodul kontaktieren Sie bitte https://rcdrone.top/ oder senden Sie eine E-Mail an [email protected].
Anwendungen
- Humanoide Roboter
- Roboterarme
- Exoskelette
- Quadrupedale Roboter
- AGV-Fahrzeuge
- ARU-Roboter
Technische Daten
| Parameter | Einheit | GIM3510-8 + GDS34 (SDC101) | GIM3510-8 + GDZ34 |
|---|---|---|---|
| Modell | - | GIM3510-8 | GIM3510-8 |
| Treiberplatinenmodell | - | GDS34 (SDC101) | GDZ34 |
| Nennspannung | V | 24 | 24 |
| Spannungsbereich | V | 12–48 | 12–40 |
| Nennleistung | W | 98 | 60 |
| Nennmoment | N.m | 1.68 | 1.00 |
| Spitzenmoment | N.m | 3.41 | 6.02 |
| Nenn-Drehzahl nach Reduktion | U/min | 430 | 535.5 |
| Maximale Drehzahl nach Reduktion | U/min | 529 | 564.6 |
| Nennstrom | A | 4.1 | 2.5 |
| Spitzenstrom | A | 8.30 | 25.30 |
| Phasenwiderstand | ohm | 0.48 | 0.48 |
| Phaseninduktivität | mH | 0.31 | 0.31 |
| Drehzahlkonstante | U/min/V | 22.04 | 23.53 |
| Momentkonstante | N.m/A | 0.44 | 0.32 |
| Anzahl der Polpaare | Paare | 7 | 7 |
| Übersetzungsverhältnis | - | 8:1 | 8:1 |
| Getriebeart | - | Planeten | Planeten |
| Material des Reduziergetriebes | - | ALU | ALU |
| Rücklauf des Reduziergetriebes | Bogenminuten | 15 | 15 |
| Motorgewicht ohne Treiber | g | 247.6 | 247.6 |
| Motorgewicht mit Treiber | g | 259.6 | 259.6 |
| Größe ohne Treiber (Durchmesser x Länge) | mm | Ø46 x 46.5 | Ø46 x 46.5 |
| Größe mit Treiber (Durchmesser x Länge) | mm | Ø46 x 51.5 | Ø46 x 51.5 |
| Maximale axiale Last | N | 75 | 75 |
| Maximale radiale Last | N | 300 | 300 |
| Geräusch | dB | <60 | <60 |
| Kommunikation | - | CAN | CAN |
| Zweiter Encoder auf der Ausgangswelle | - | JA | JA |
| Schutzart | - | IP54 | IP54 |
| Betriebstemperatur | °C | -20 bis +80 | -20 bis +80 |
| Encoderauflösung (Treiber-Encoder) | bit | 14 | 14 |
| Getrennte Encoder-Unterstützung | - | NEIN | NEIN |
| Benutzerdefinierte Bremsunterstützung | - | JA | JA |
Handbücher
- SteadyWin_GIM3510-8_Installationsdiagramm.stp
- GlM3510-8_Installationszeichnung.pdf
- Gl3510-8_mit_Bremse_Installationszeichnung.pdf
Details

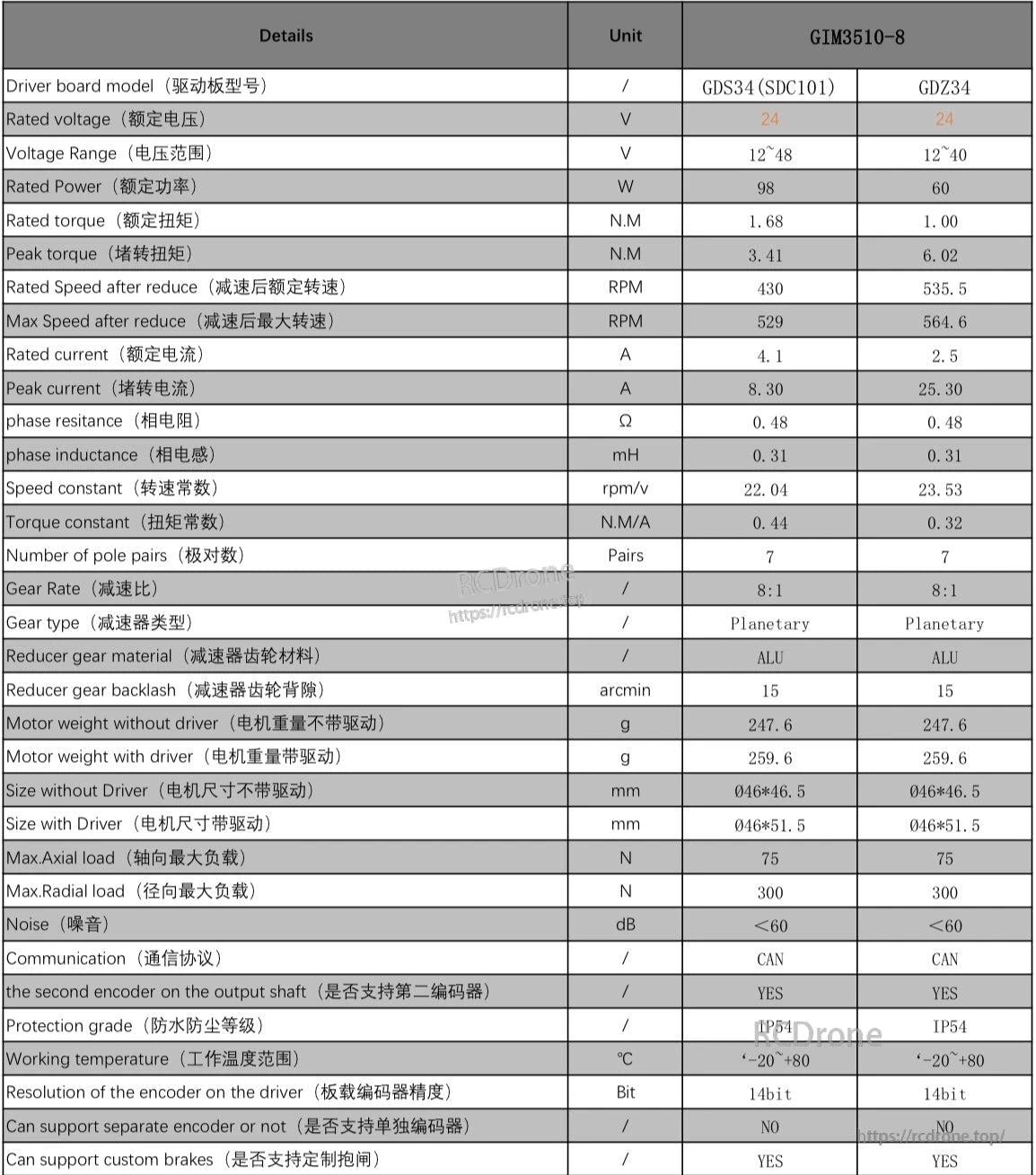
GIM3510-8 Roboter-Gelenkspezifikationen im Vergleich zu GDS34 und GDZ34 Treiberplatinen. Wichtige Kennzahlen umfassen Spannung, Leistung, Drehmoment, Geschwindigkeit, Strom, Gewicht, Größe, Tragfähigkeit, Geräusch, Kommunikation, Encoder, Schutzgrad, Temperaturbereich und benutzerdefinierte Bremsunterstützung.
Related Collections









